moveit是一个强大的模块:
因为我的项目是使用UR机器人,我了解到MoveIt可以轻易的实现正逆解,当然这个我在前面的文章中也有涉及,但是更多的,比如singularity,object avoidance, track planning...都是我希望能直接借鉴的,因为自己开发其中任何功能都需要很长时间,另外现在行业里,各家automation都有自己的MC(motion controller),可以帮助开发者节省这部分开发。但是目前项目阶段急需做选型仿真,所以我才使用了MoveIt。另外Matlab robotic toolbox也是很好的选择,但是哪有开源的香呢?
安装moveit
prereq:
Ros installed (我的版本Noetic[rosversion: 1.15.14]);
patform: Ubuntu 20.04
MoveIt 1 Binary Install | MoveIt (ros.org)
非常简单:
sudo apt install ros-noetic-moveit
##CREATE WORKSPACE
mkdir -p ~/catkin_ws2/src
cd ~/catkin_ws2/
catkin_make
##ADDTO SYSTEM VAR
source devel/setup.bash
echo "source ~/catkin_ws2/devel/setup.bash" >> ~/.bashrc
##PULL THE GITHUB PROJECT OF UR ROBOT
$ cd ~/catkin_ws2/
#clone the driver
$ git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
#clone fork of the description.
$ git clone -b calibration_devel https://github.com/fmauch/universal_robot.git src/fmauch_universal_robot
#clone ur_msgs
$ git clone https://github.com/ros-industrial/ur_msgs.git src/ur_msgs
$ rosdep update #RECOMMEND STRONGLY USE ROSDEPC
$ rosdep install --from-paths src --ignore-src -y
##
catkin_make
source devel/setup.bash
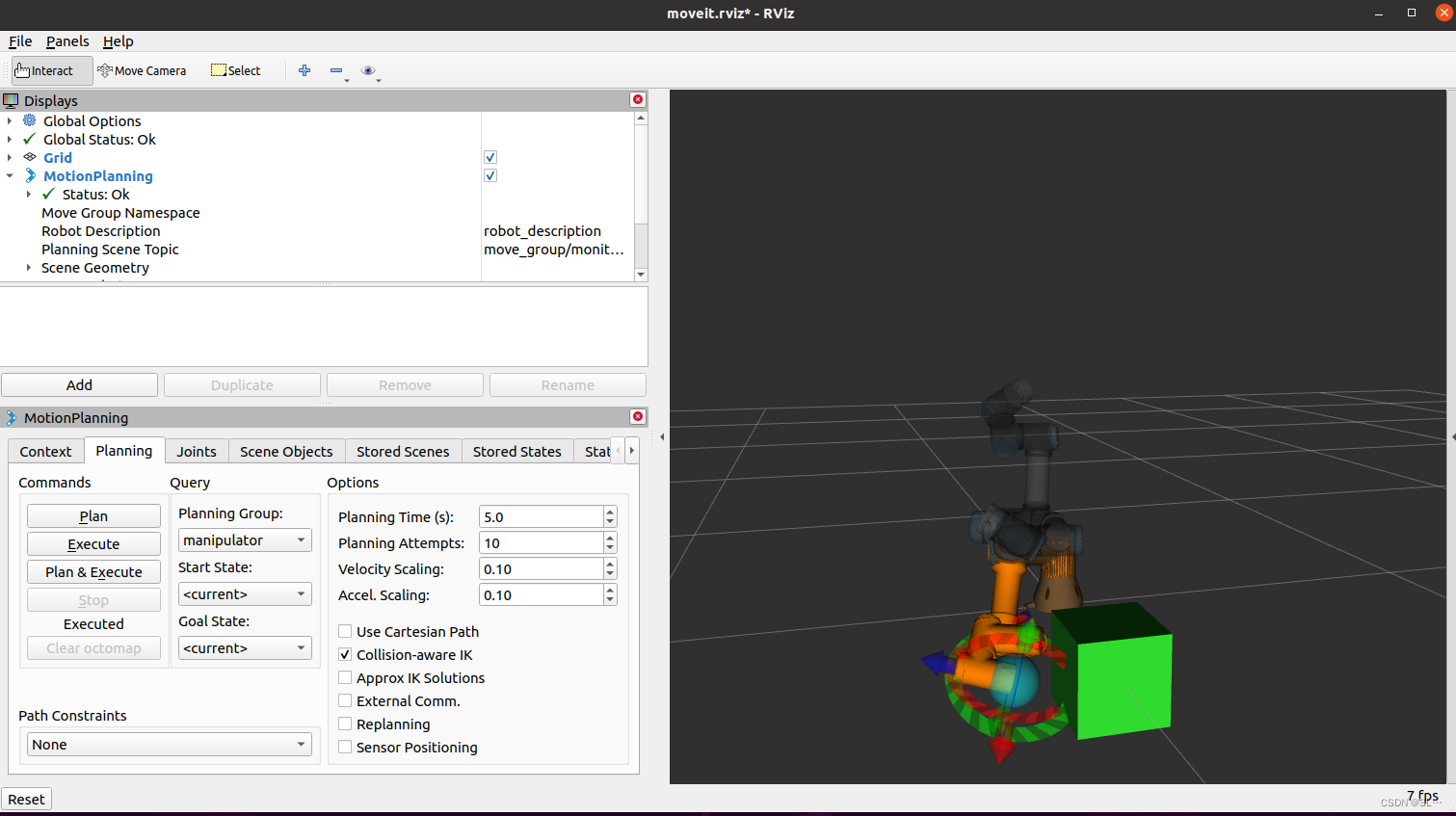
##LAUNCH A DEMO PROJECT
roslaunch ur3_moveit_config demo.launch
我在使用的过程中可能会出现git clone失败的情况,可能是因为网络的原因,可以去github的网站上自己扒下来,然后放在对应的文件夹系统下。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)