文章目录
- 整体框图
- 一、基础工程
- 1 新建工程
- 2 配置RCC
- 3 配置SYS
- 4 工程设置
- 5 生成代码
- 6 keil设置下载&复位
- 二、必备外设
- 1 目录规范
- 2 LED
- 2 RTC
- 3 USART
- 4 KEY
- 三、其他外设
- 1 OLED(模拟IIC、模拟SPI)
- 2 BH1750光强检测
- 3 MQ2烟雾检测
- 3 MQ4甲醛检测
- 4 DHT11温湿度
- 5 SIM900A GSM模块
- 6 BMP180气压传感器
- 7 ESP8266+Onenet+HTTP
- 8 ESP8266+Onenet+MQTT
整体框图
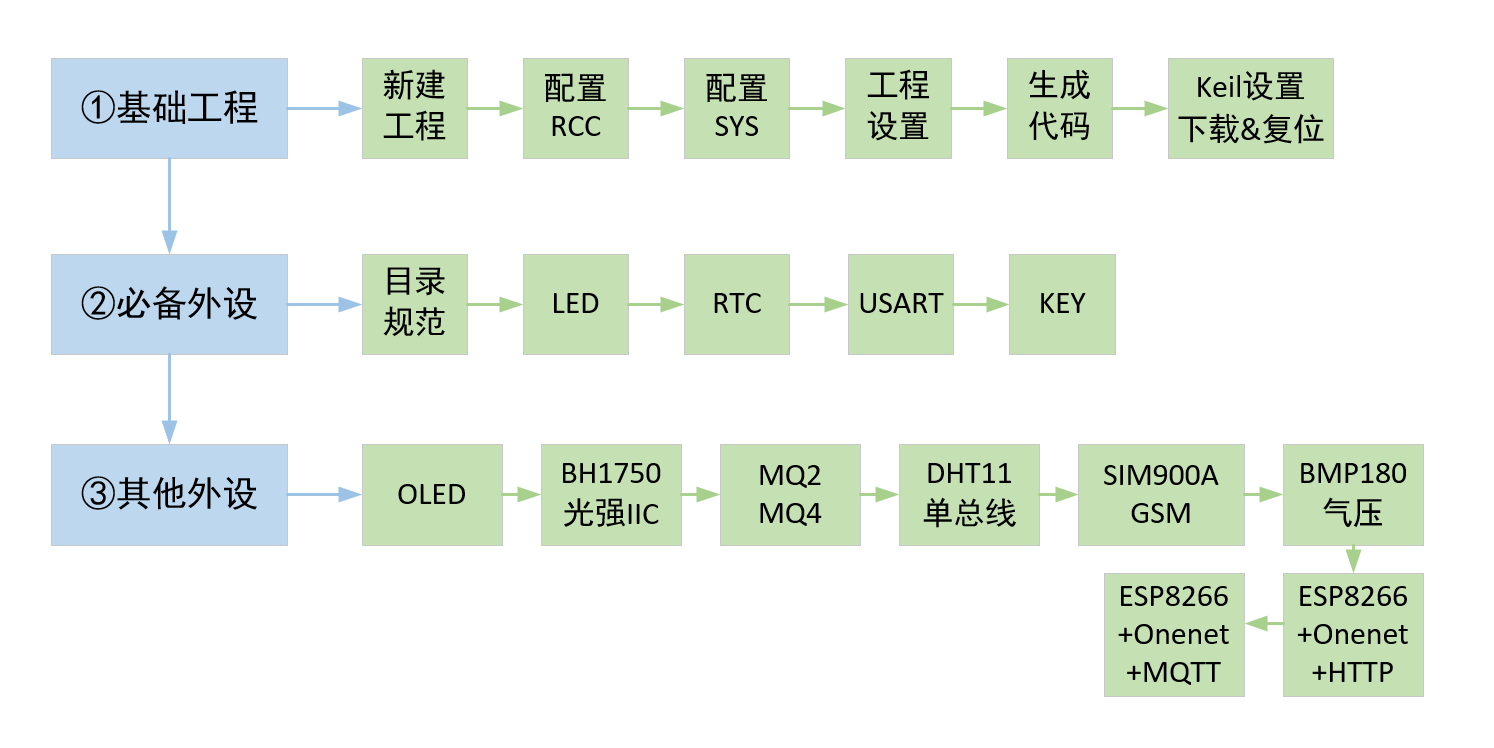
软件:keil5、STM32Cubemx
硬件:淘宝的STM32F103C8T6最小系统
一、基础工程
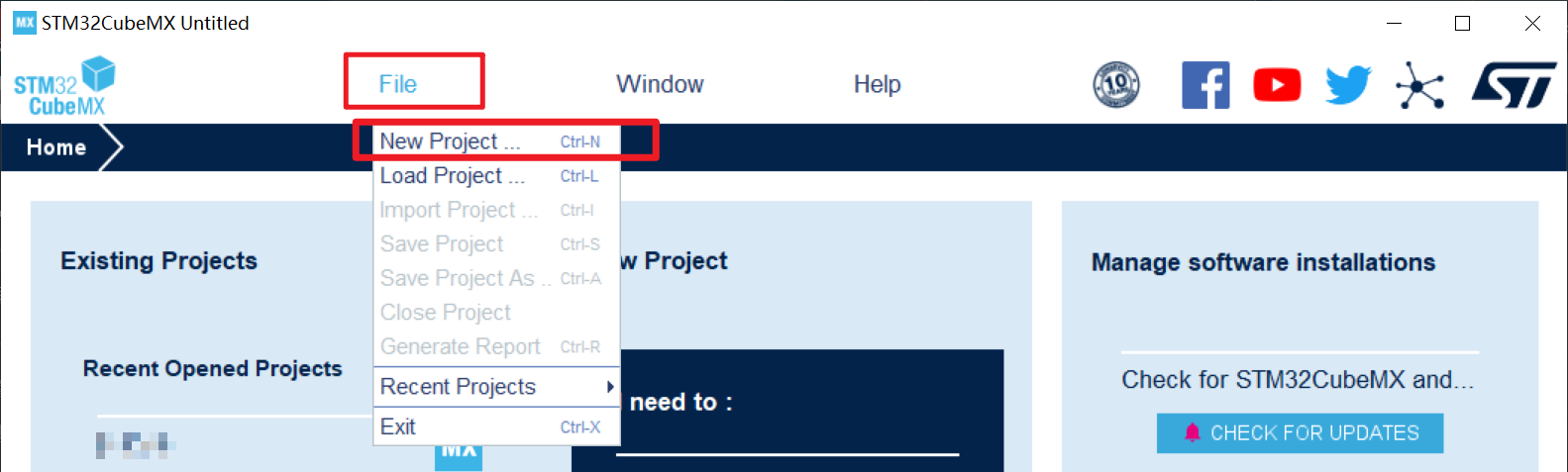
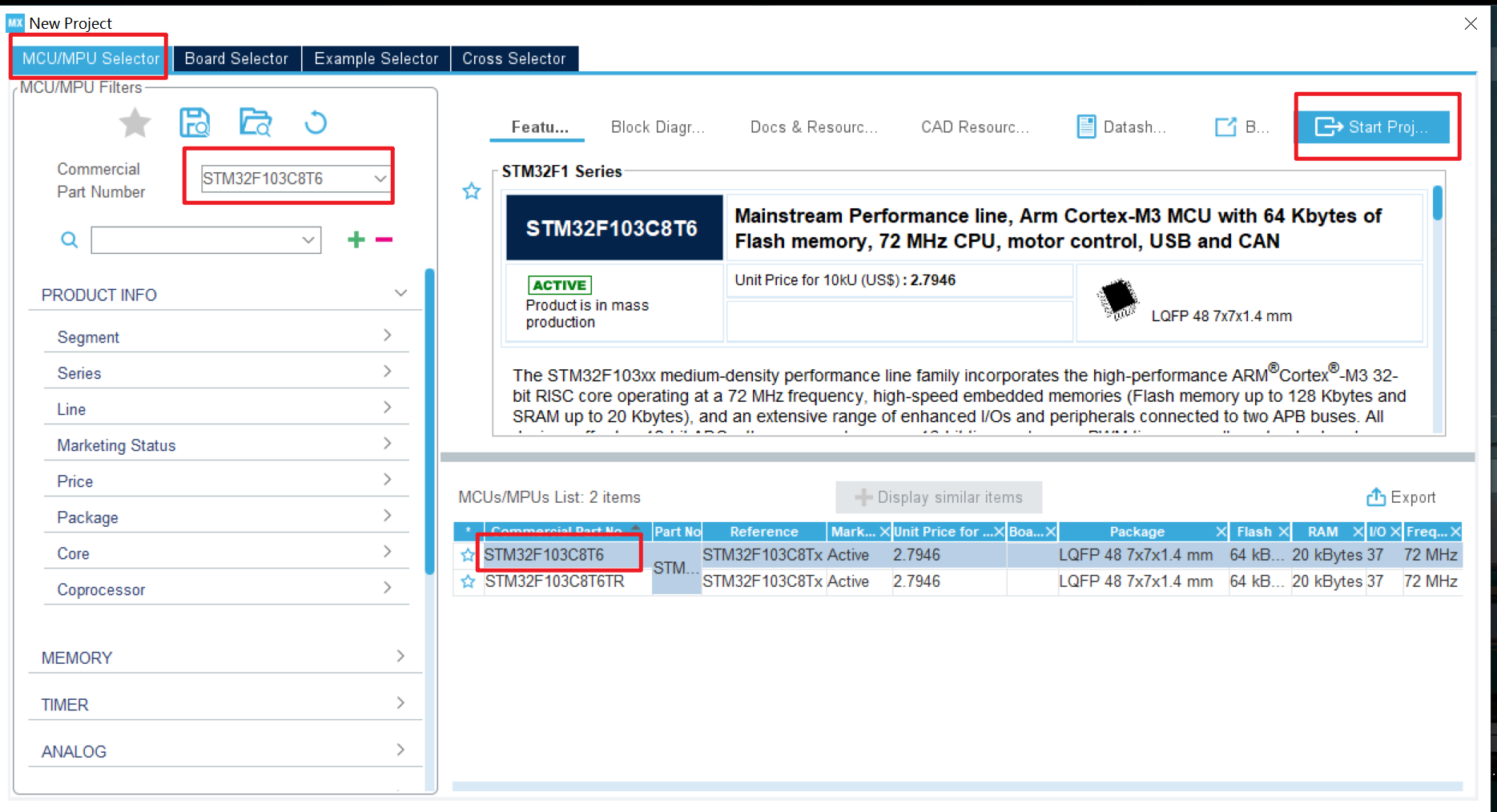
1 新建工程
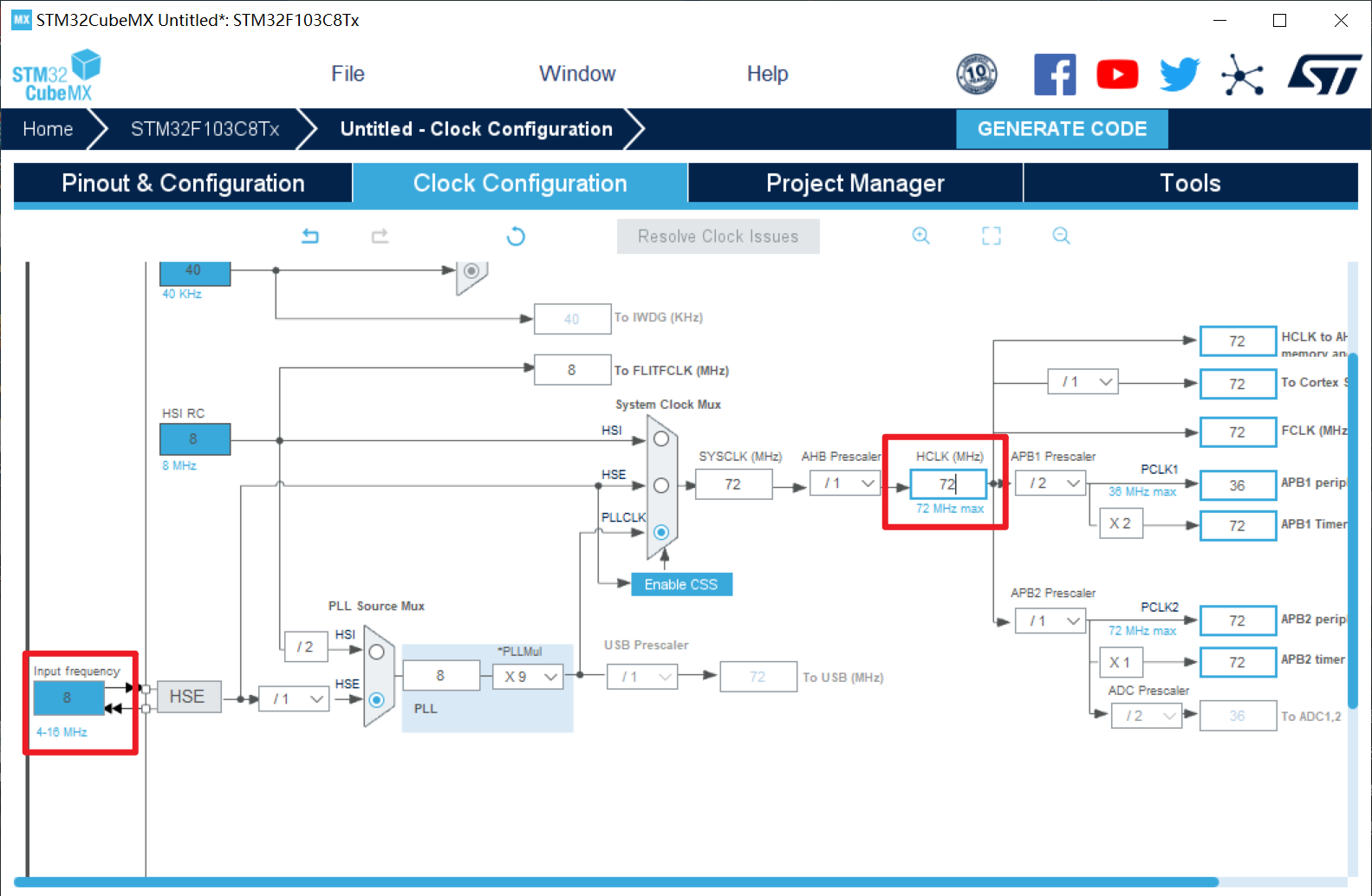
2 配置RCC
选择外部时钟源。
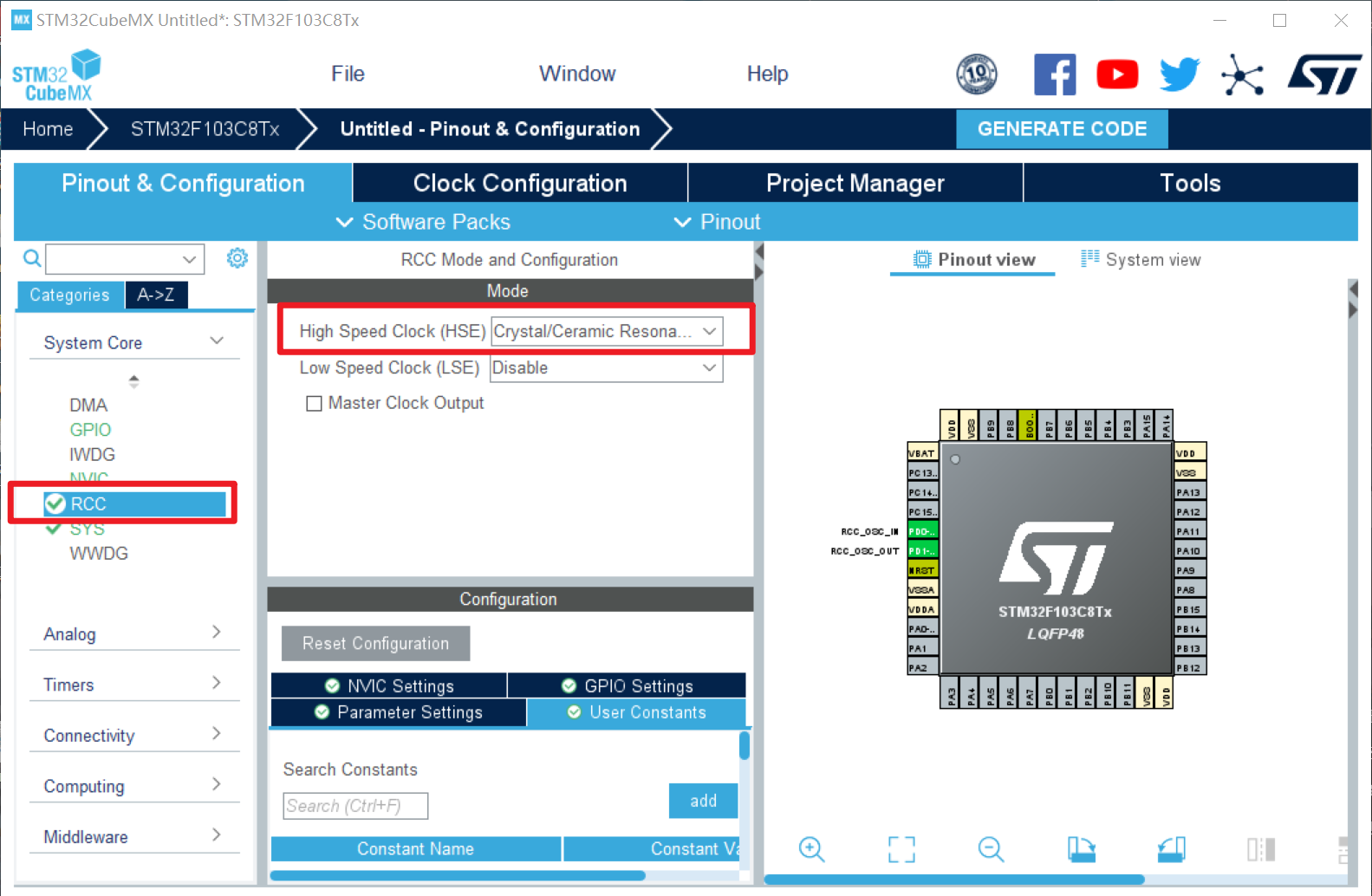
设置外部晶振输入值,我这块板子是8M。
然后手动输入最大时钟频率,然后回车让他自动配置时钟树。我这块板子是72M。
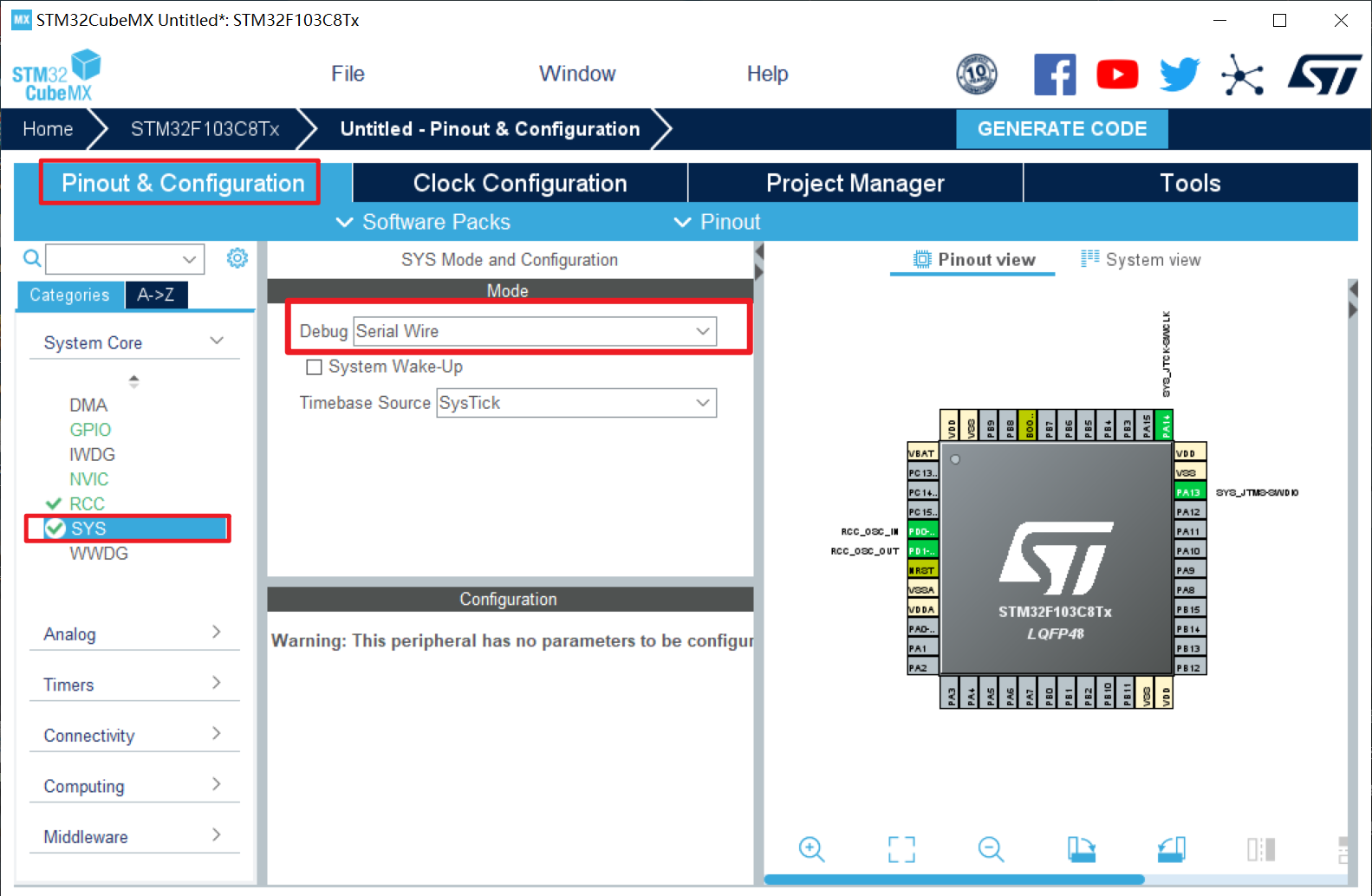
3 配置SYS
我的下载器是SWD两根线的,所以我选这个。(一定配置完下载模式再进行程序下载,不然单片机变砖,需要从串口下载进行恢复)
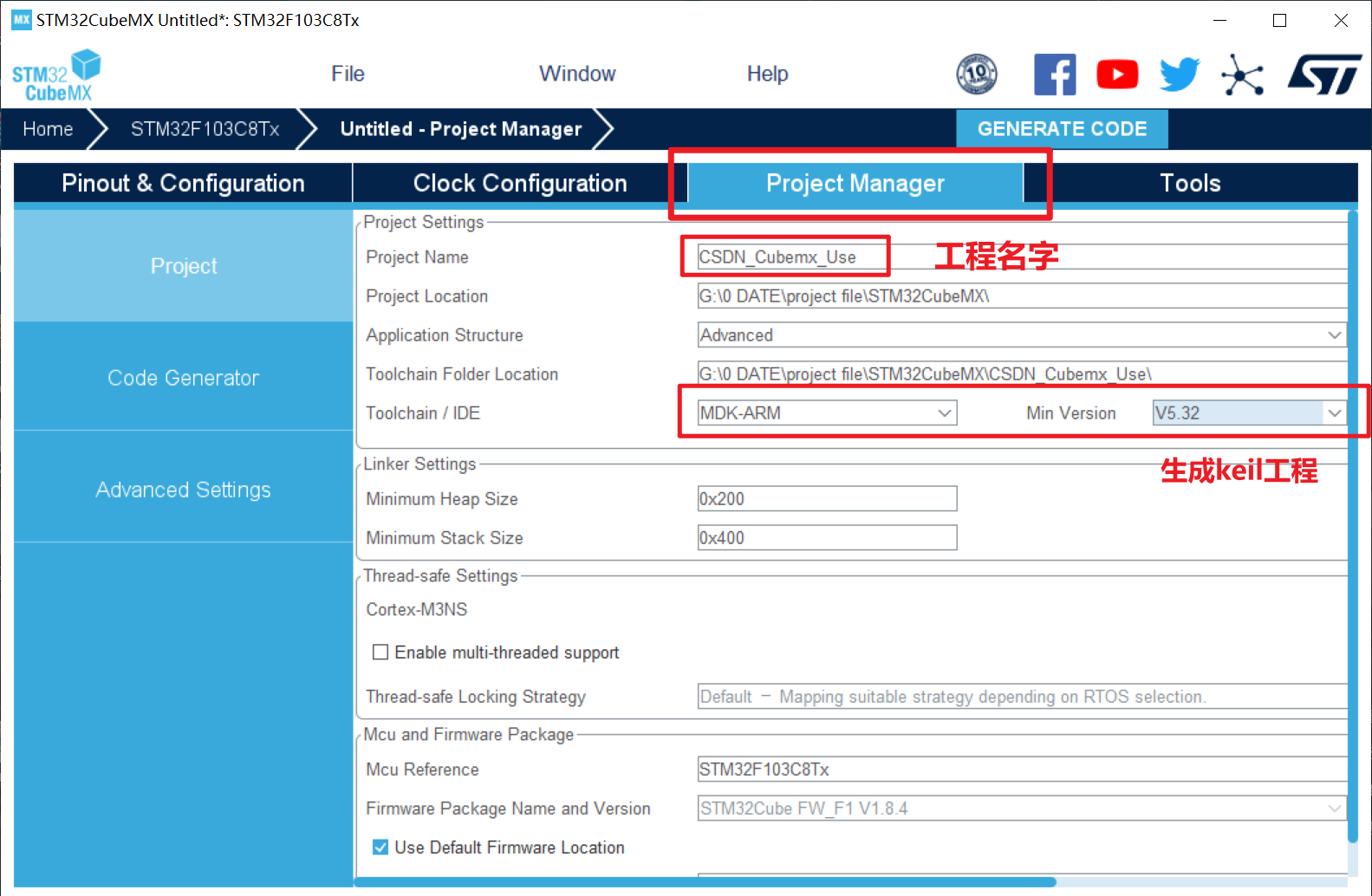
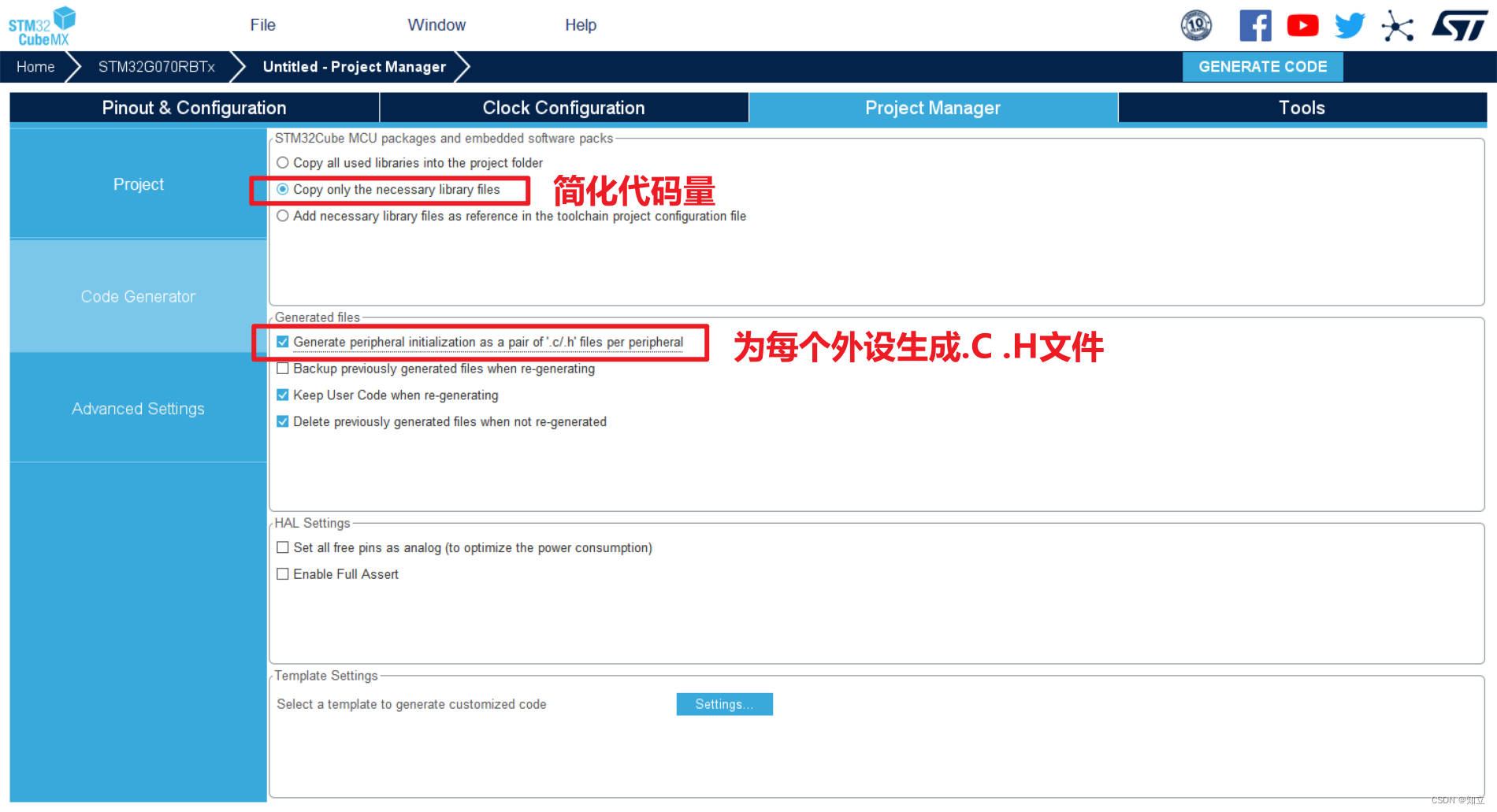
4 工程设置
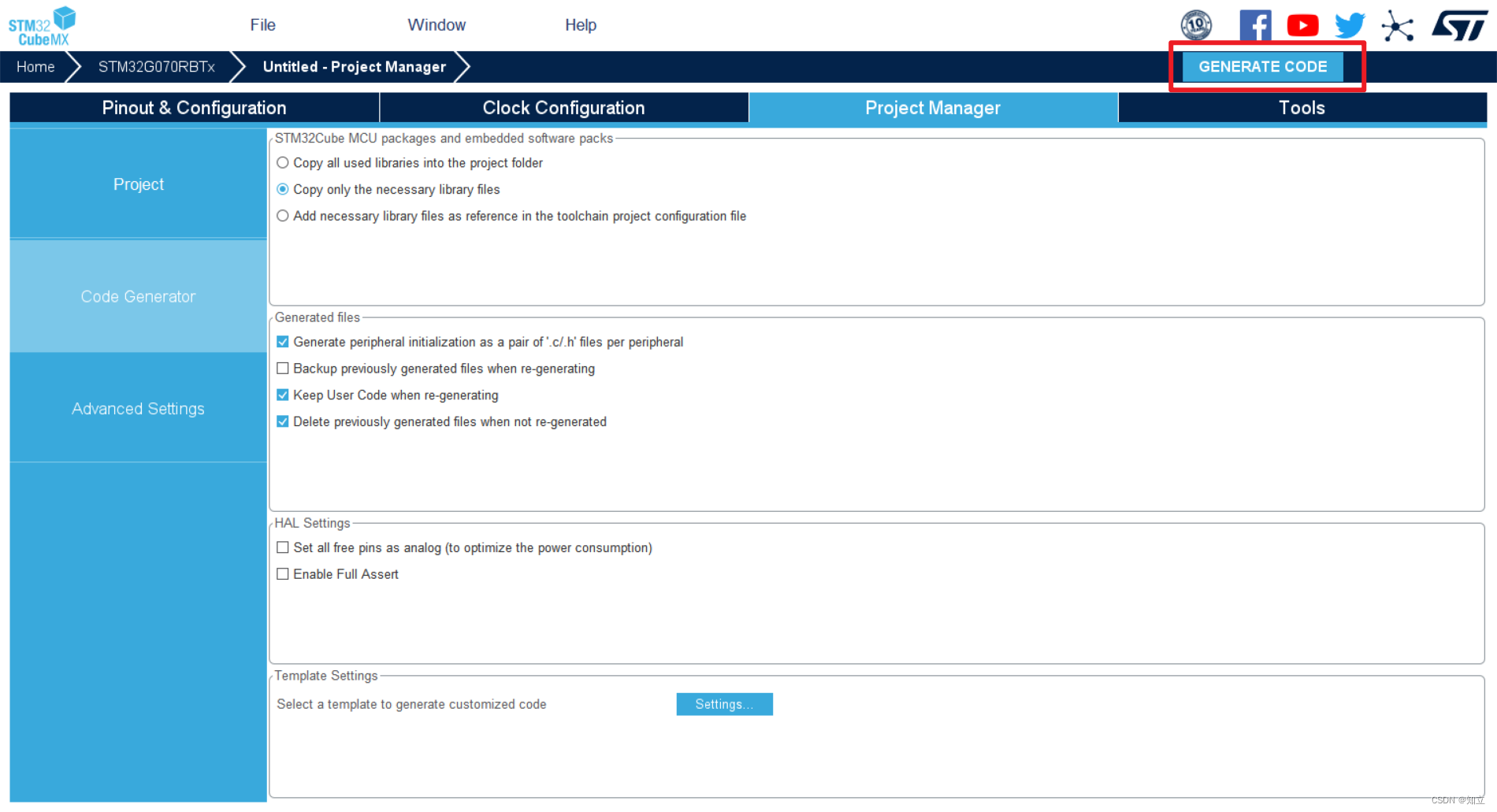
5 生成代码
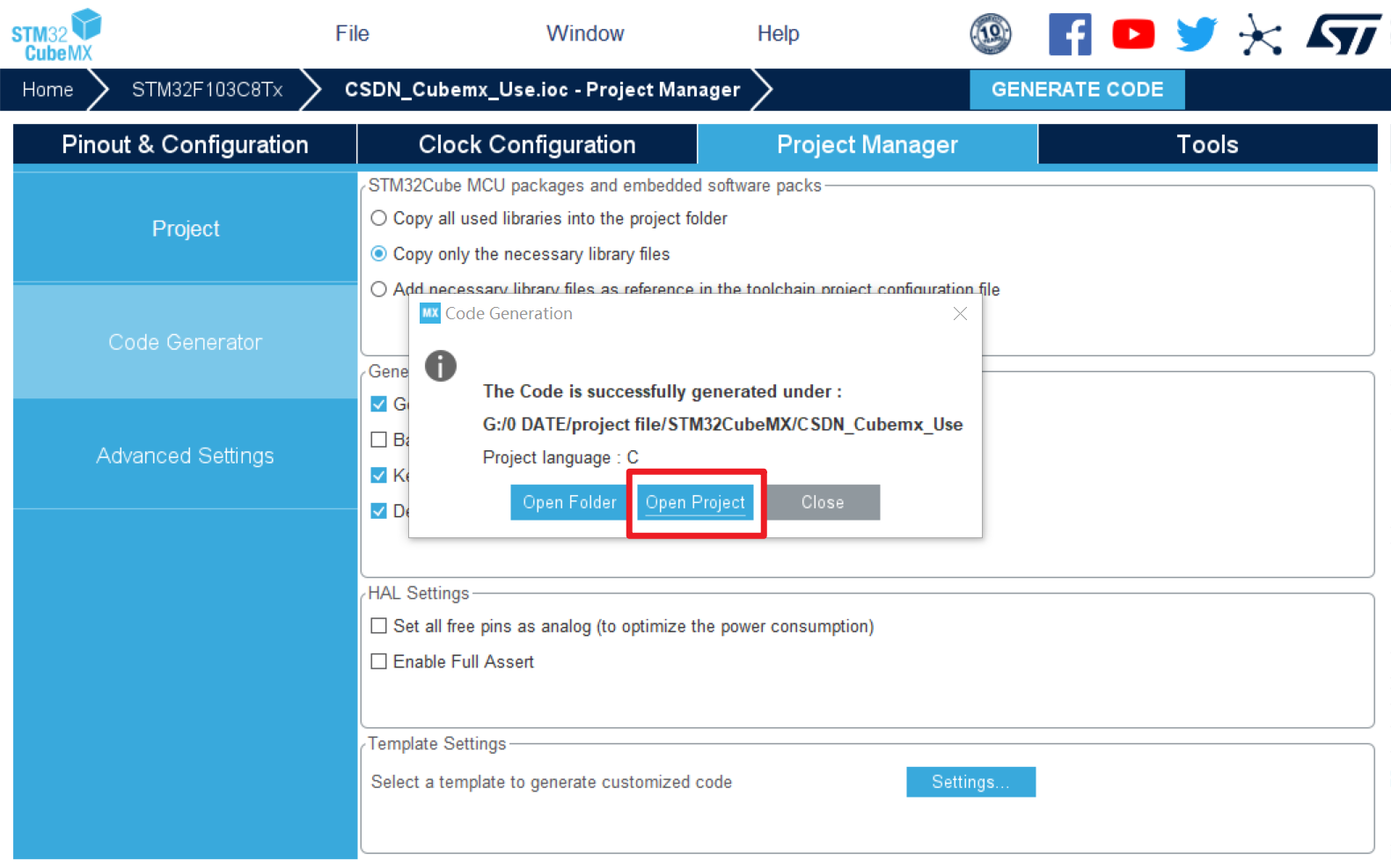
点击生成代码
打开keil工程
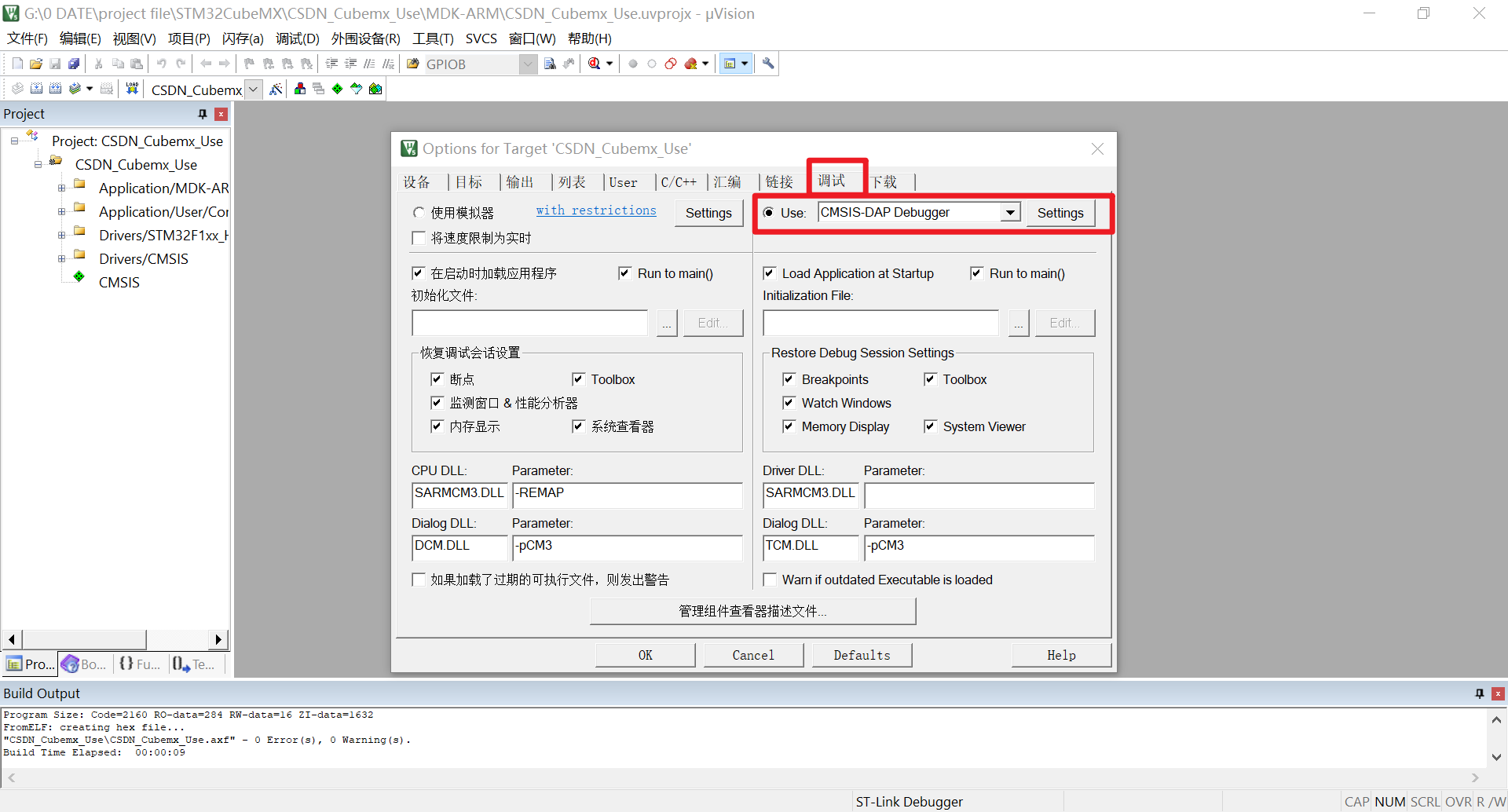
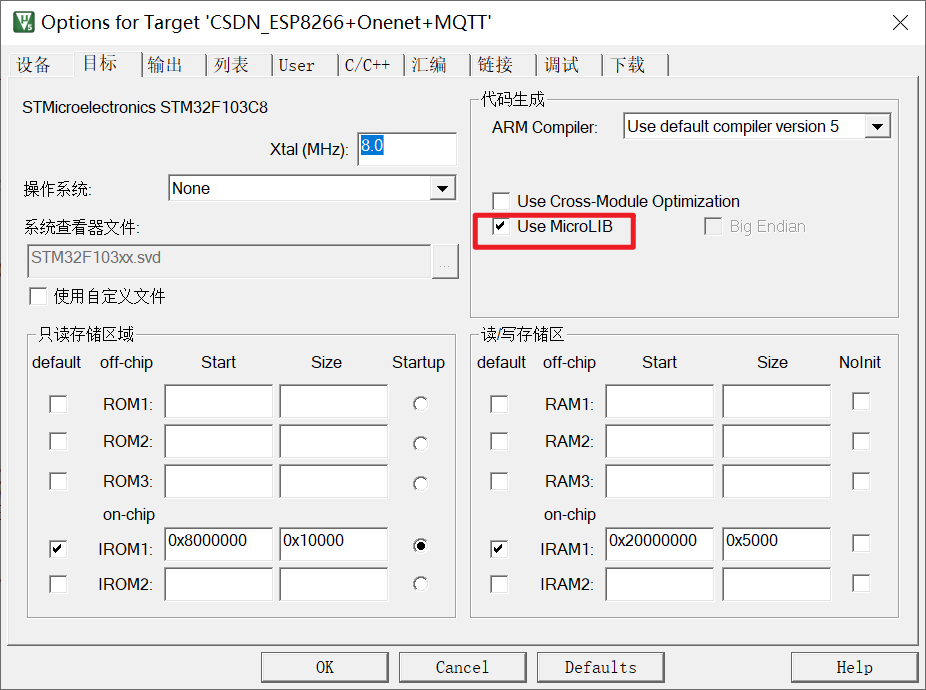
6 keil设置下载&复位
选择下载器类型,我用的是DAP。点击后面的Setting。
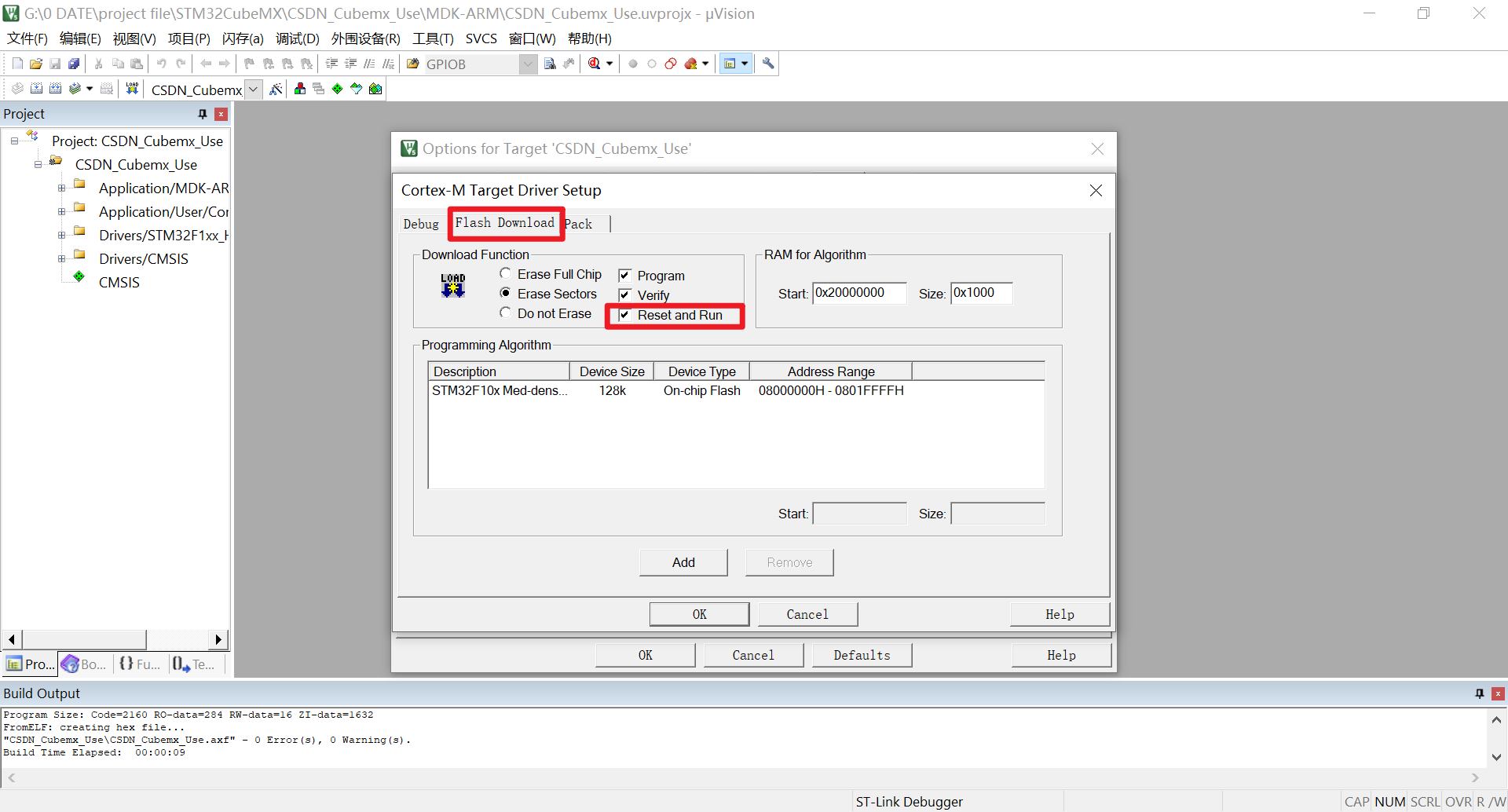
进入后勾选自动复位,表现为每次下载程序后单片机自动复位运行程序。
设置完点击OK。
二、必备外设
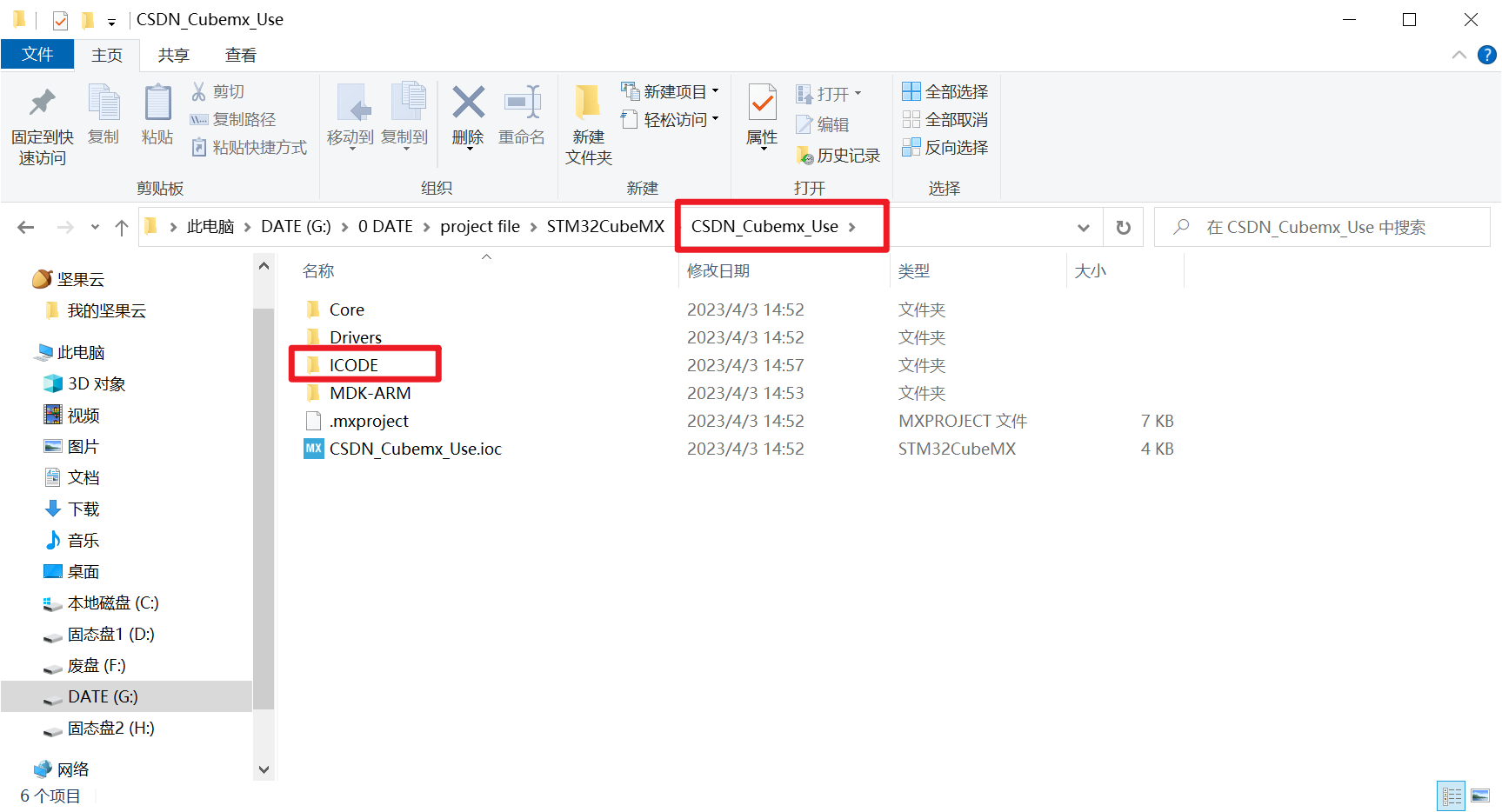
1 目录规范
在工程目录下,新建一个ICODE文件夹,用于存放自己写的各种外设文件。
2 LED
1 导入.c.h文件(就是将.c.h文件导入keil工程,后面不再叙述此环节)
将之前写好的 LED文件夹复制到本工程的ICODE目录下。
里边有led.c led.h文件夹。
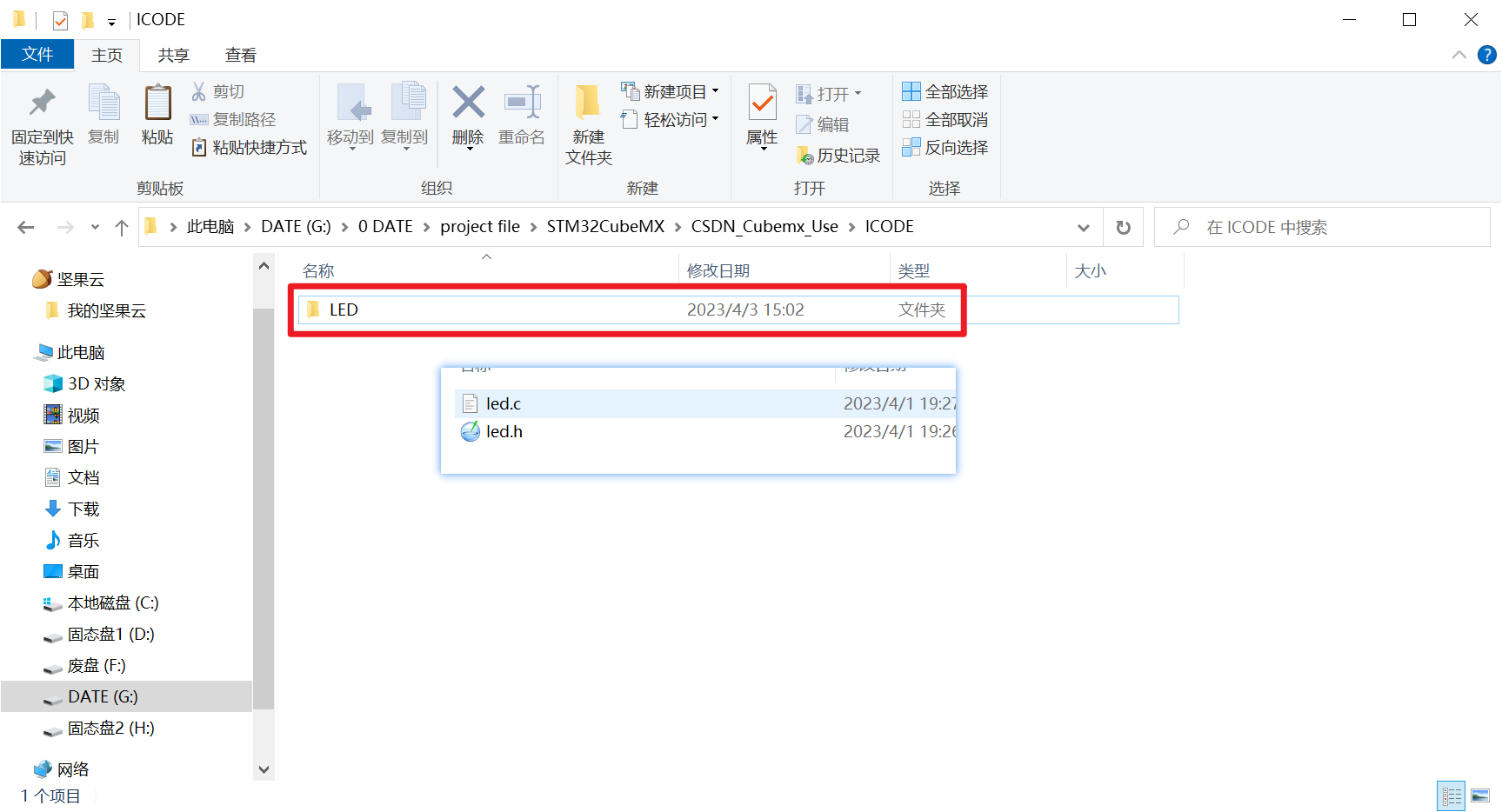
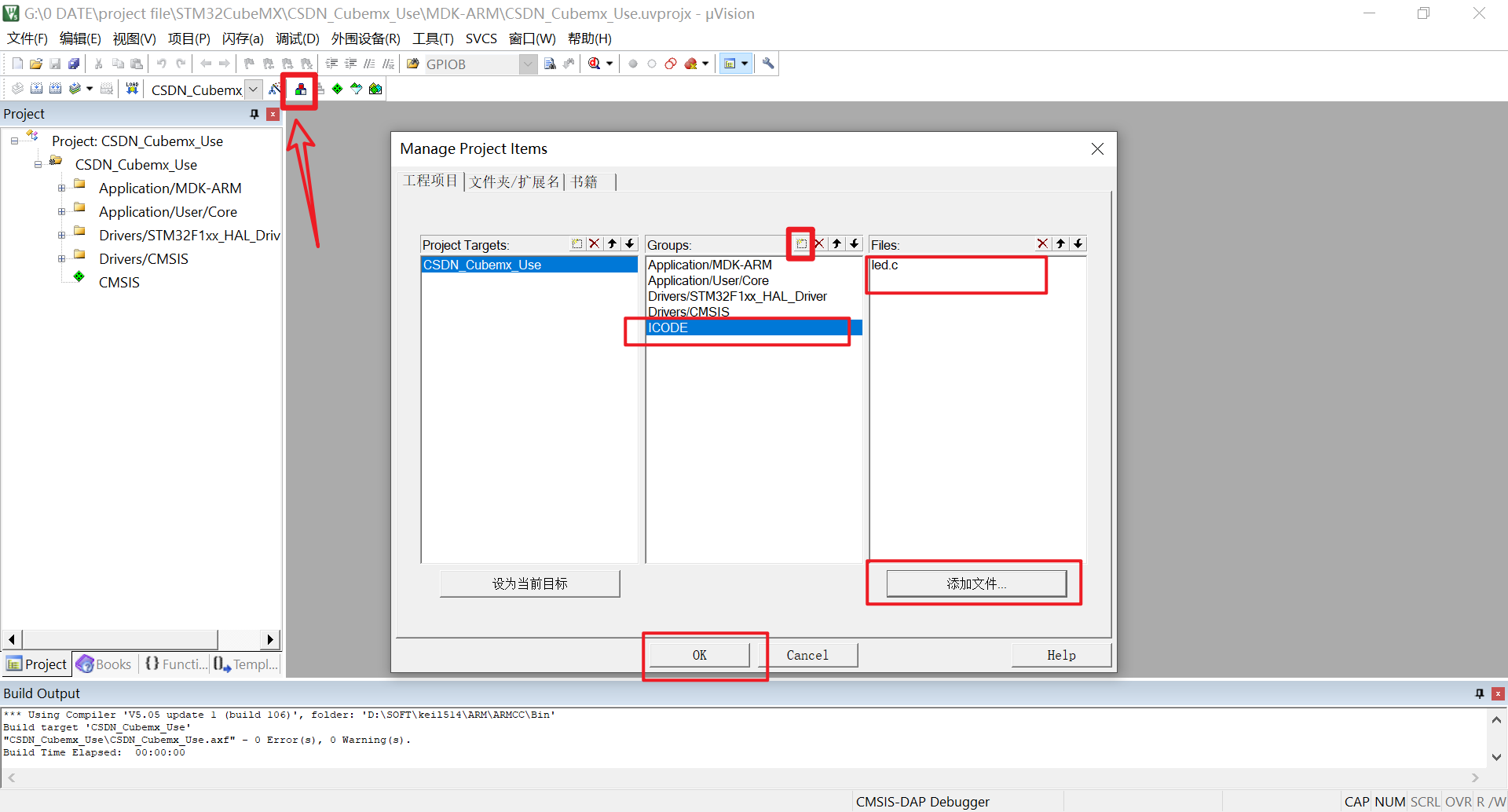
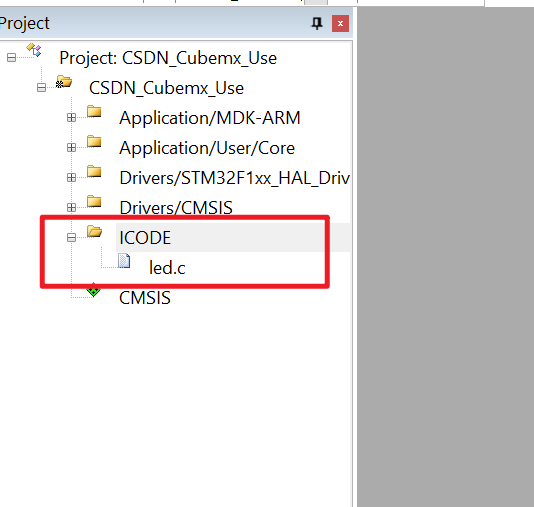
在工程中,创建ICODE文件夹,添加led.c文件。
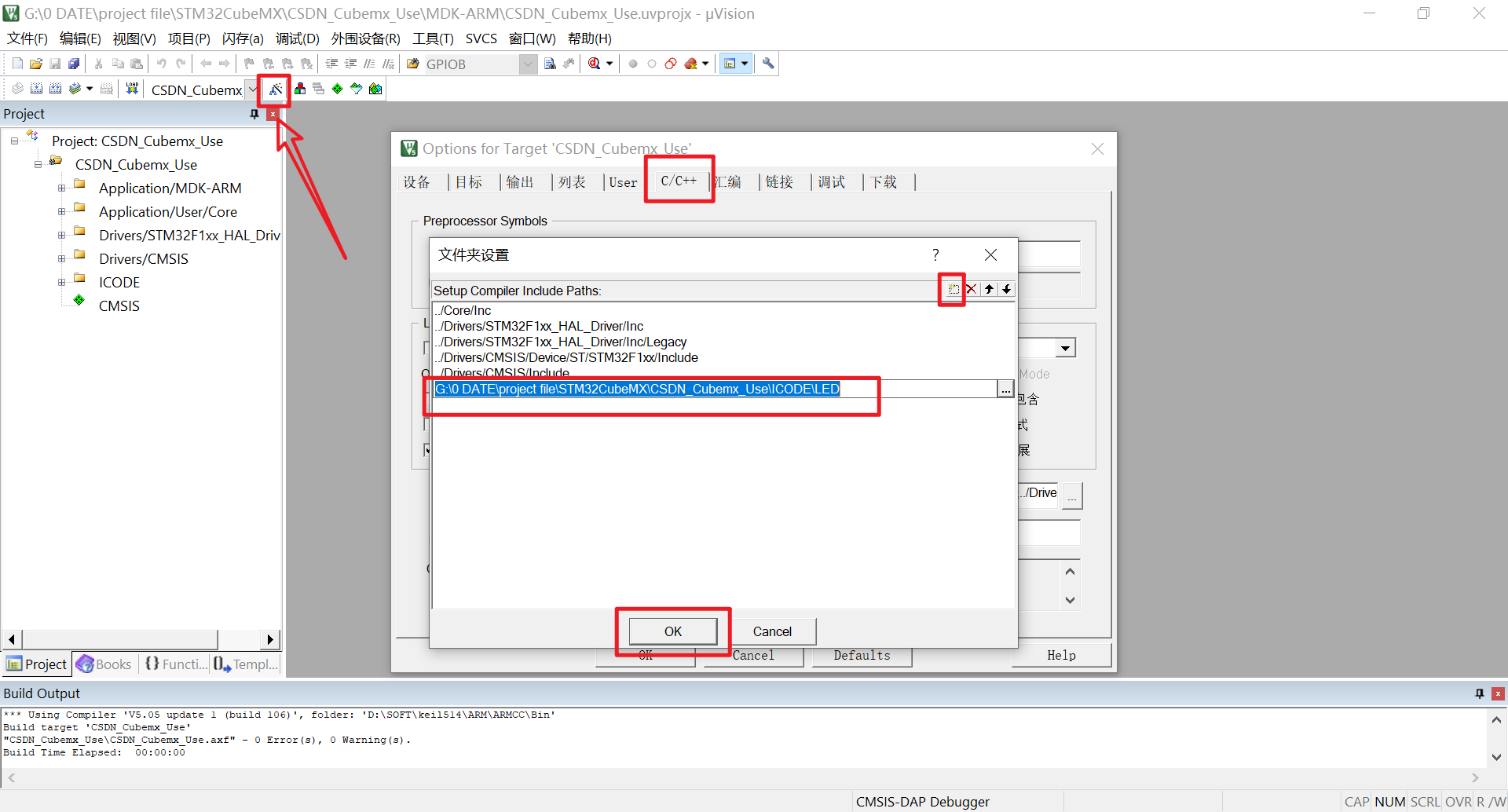
在工程中,添加led.h文件。
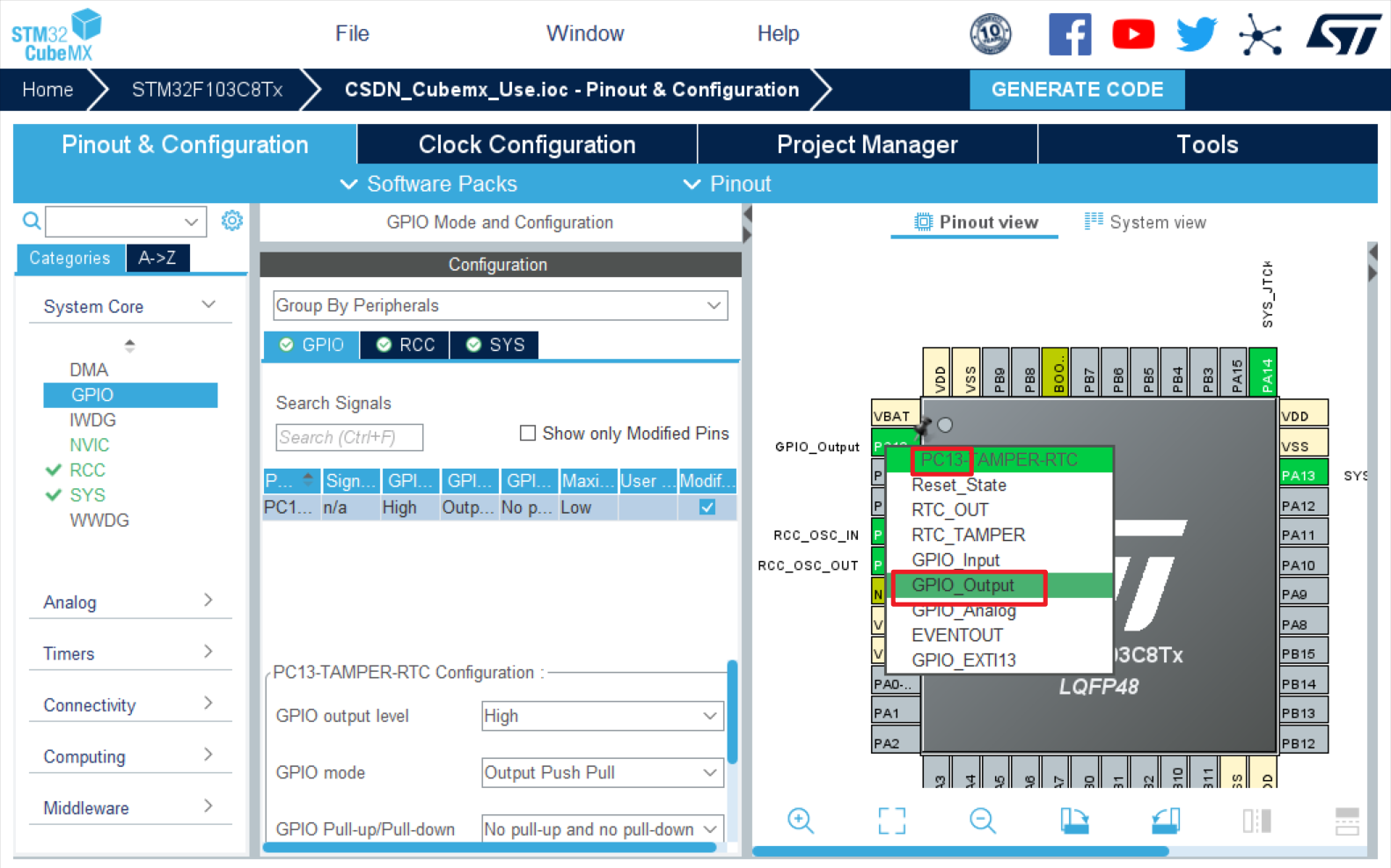
2 Cubemx配置
配置板子LED引脚,推挽输出模式。我这块板子是 PC13。
重新生成代码。
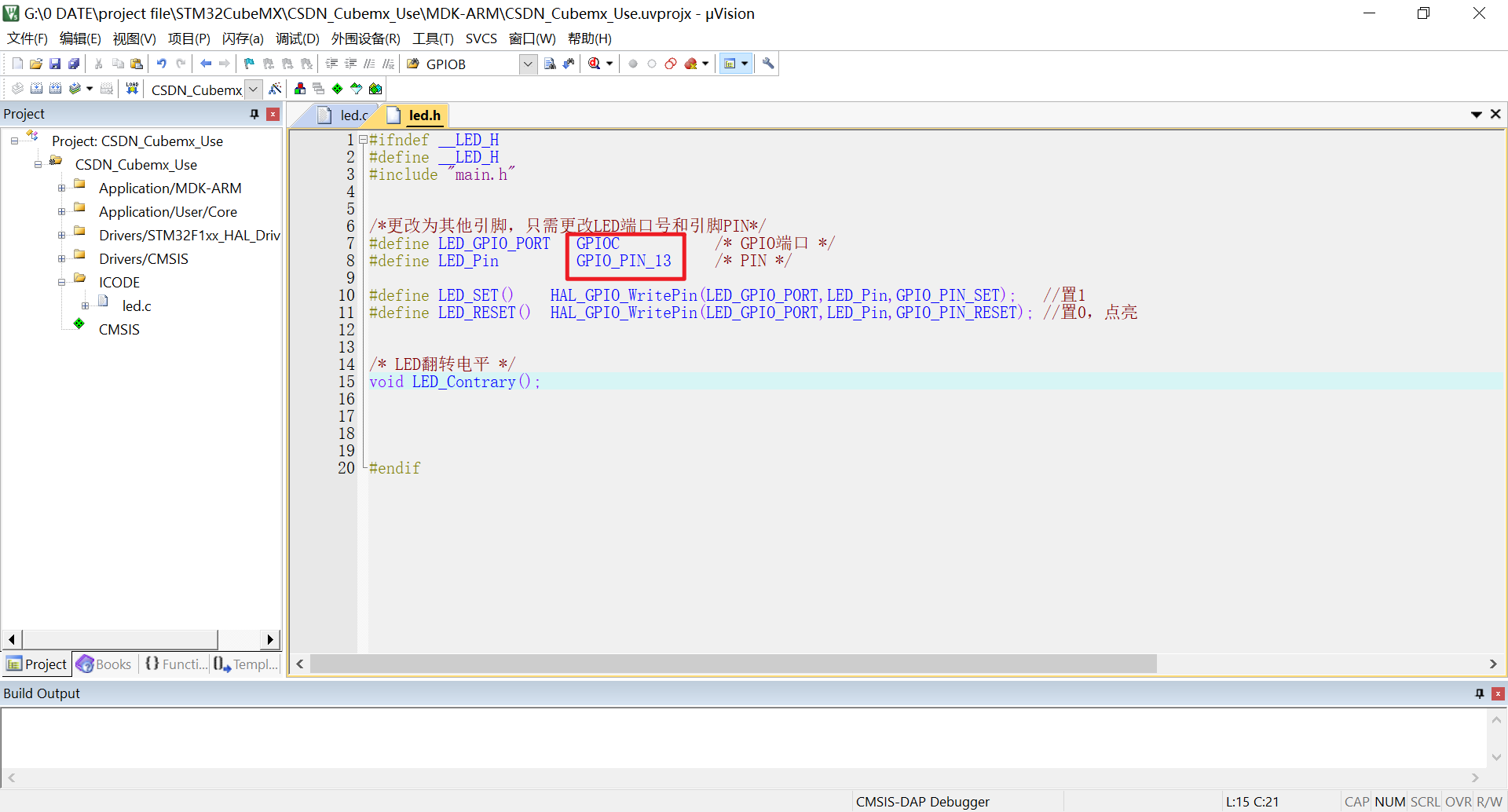
3 修改 .h 文件
更改为其他引脚,只需更改LED端口号和引脚PIN。我这块板子是PC13。
4 测试
在main.c中添加 #include “led.h”
在while里添加下面代码。LED灯闪烁。
LED_Contrary();
HAL_Delay(500);
2 RTC
1 导入.c.h文件(不再赘述,详细见LED部分)
无
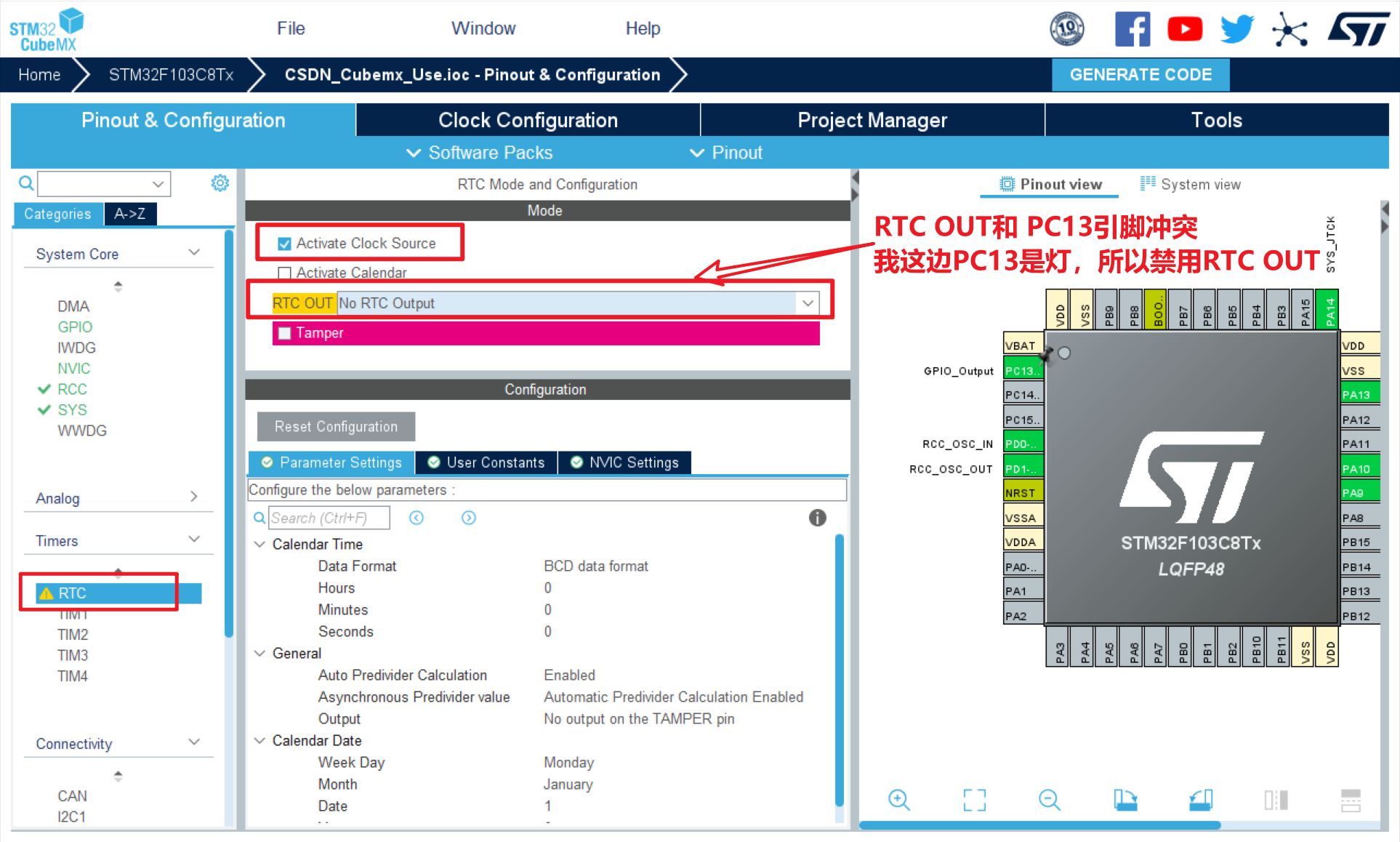
2 Cubemx配置
和PC13冲突,核心板PC13是LED,所以禁用RTC OUT。
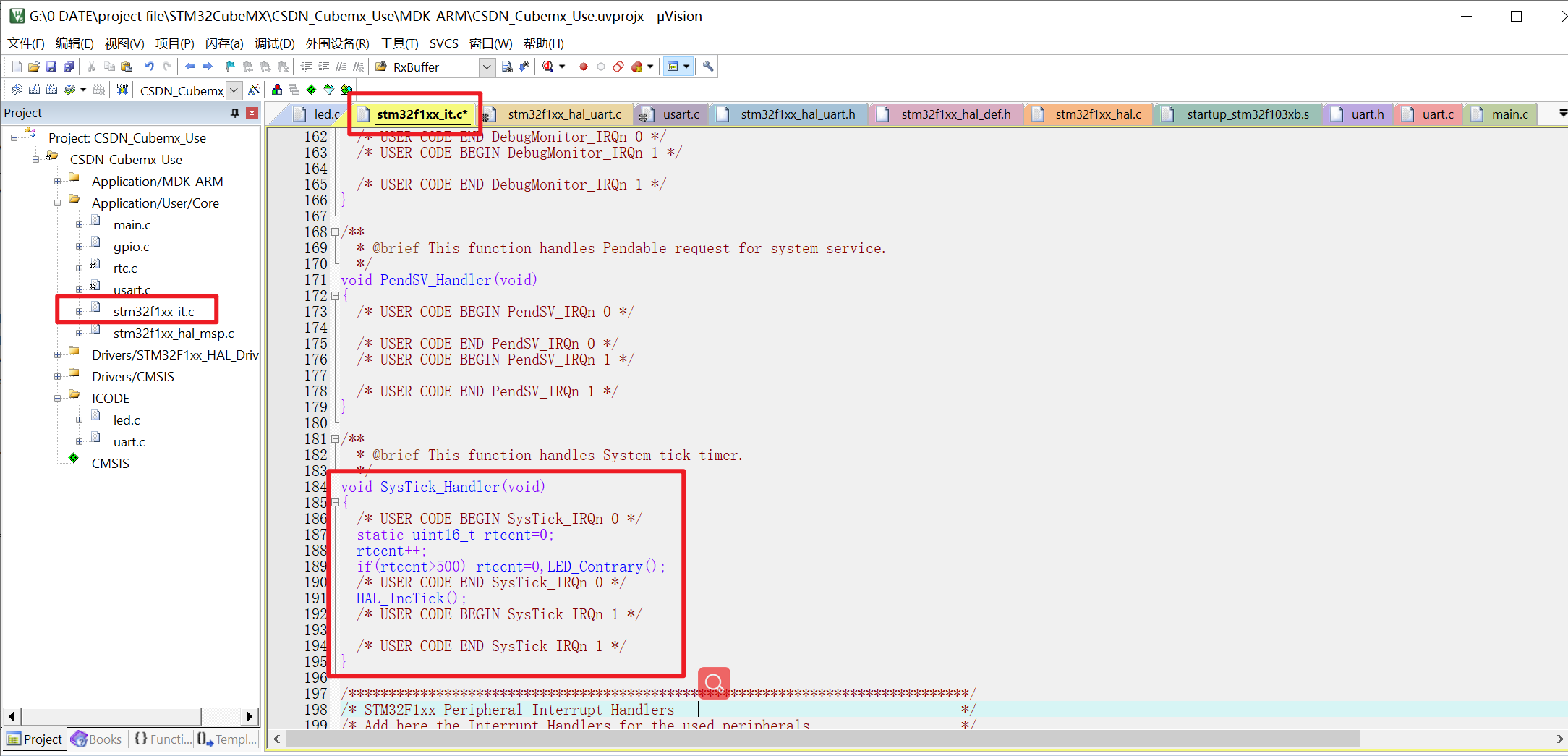
3 修改 .c 文件
在中断.c里,填加led头文件,在RTC中断函数里,加入500ms,LED电平反转函数。
#include "led.h"
static uint16_t rtccnt=0;
rtccnt++;
if(rtccnt>500) rtccnt=0,LED_Contrary();
4 测试
LED闪烁。
3 USART
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
勾选使用
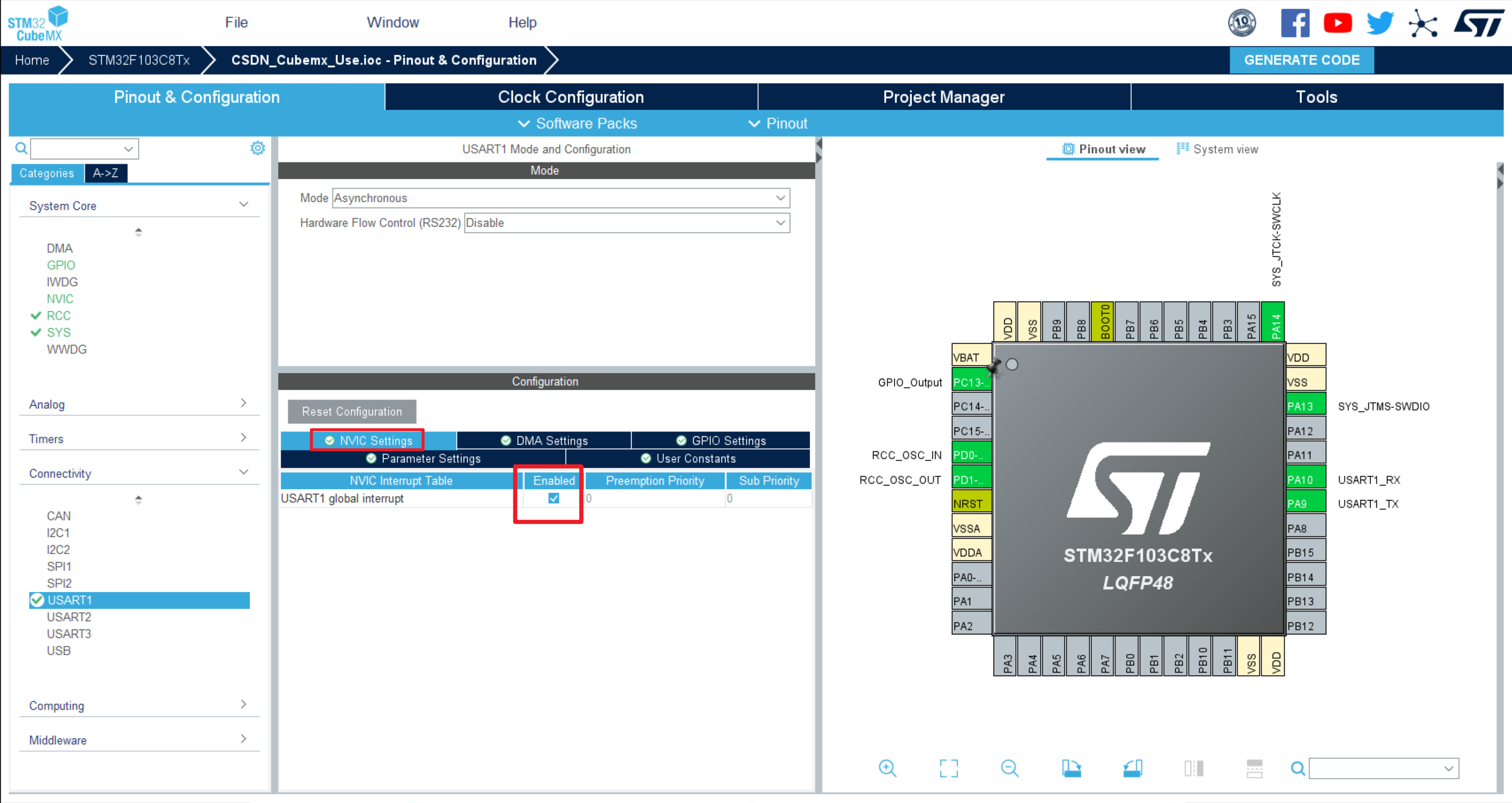
2 Cubemx配置
使用串口1,波特率默认,异步通信。
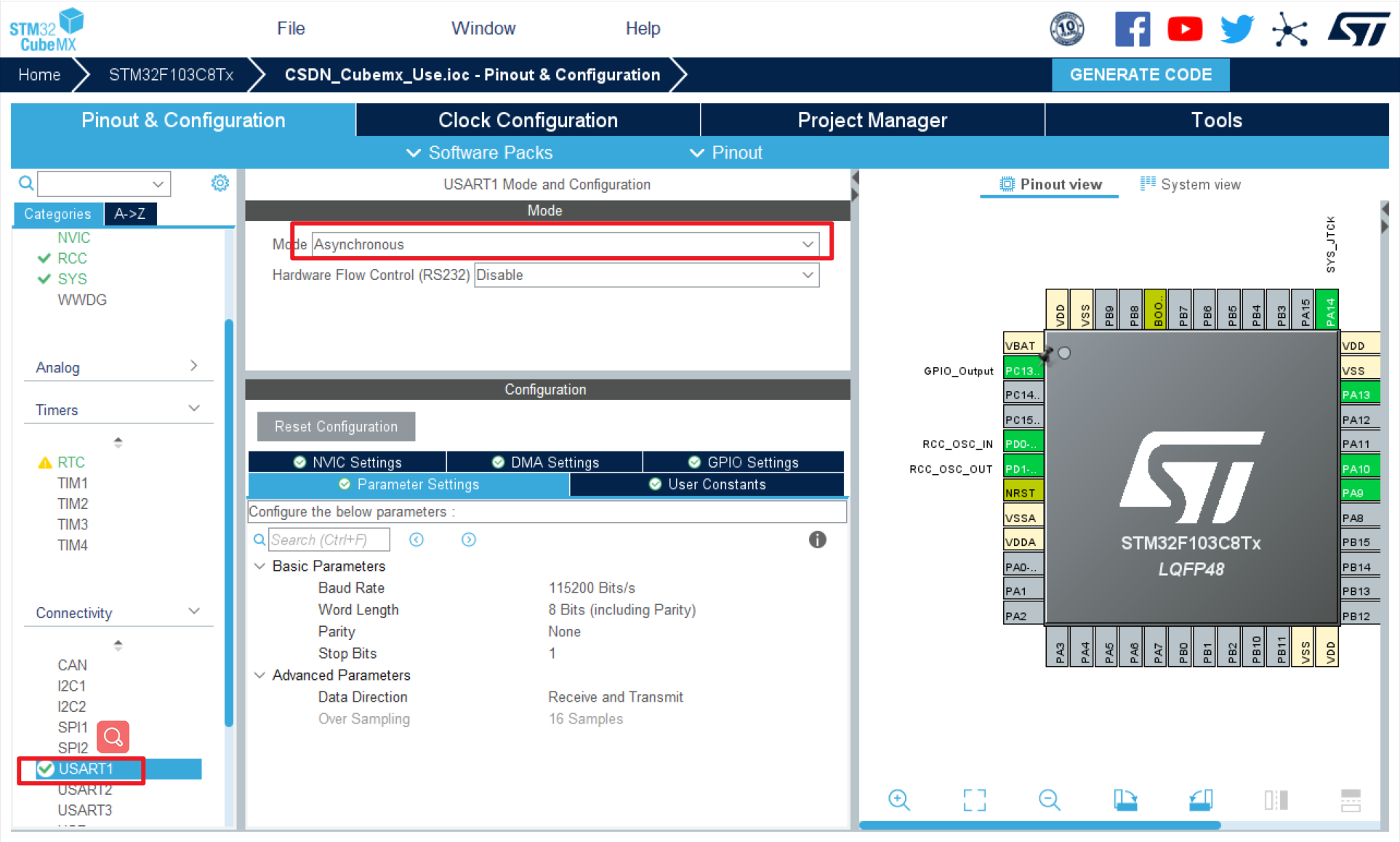
开启中断
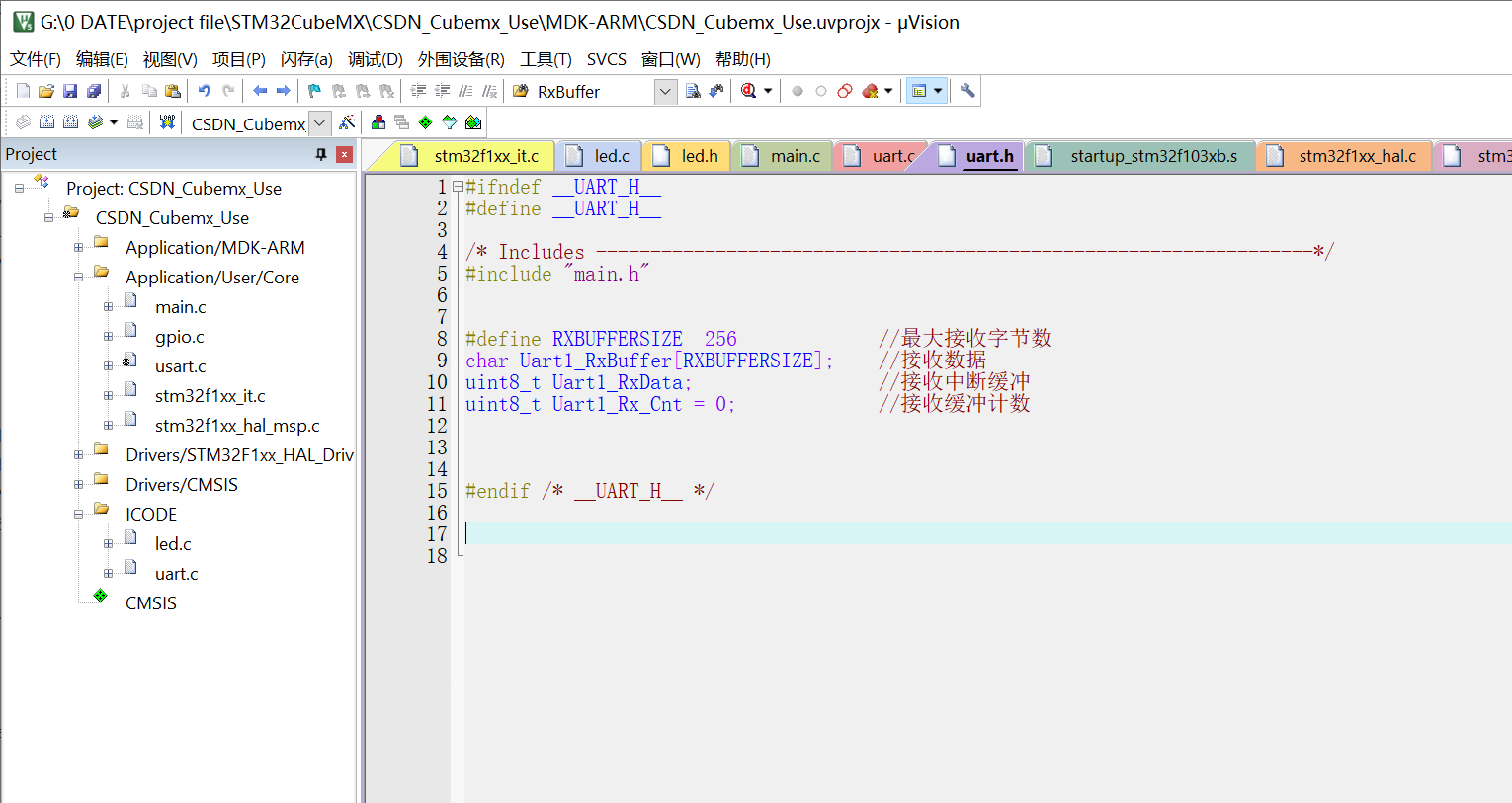
3 修改 .h 文件
代码默认使用串口1。添加其他串口可以在.h里,复制,改名。
4 测试
串口发送/接收函数:
HAL_UART_Transmit();串口发送数据,使用超时管理机制
HAL_UART_Receive();串口接收数据,使用超时管理机制
HAL_UART_Transmit_IT();串口中断模式发送
HAL_UART_Receive_IT();串口中断模式接收
HAL_UART_Transmit_DMA();串口DMA模式发送
HAL_UART_Transmit_DMA();串口DMA模式接收
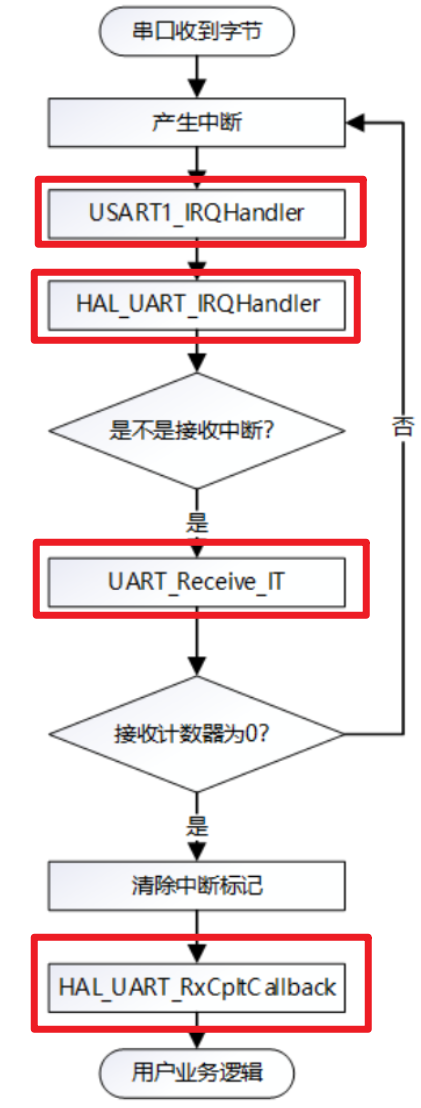
串口中断函数:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //串口发送中断回调函数
HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //串口发送一半中断回调函数(用的较少)
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //串口接收中断回调函数
HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);//串口接收一半回调函数(用的较少)
HAL_UART_ErrorCallback();串口接收错误函数
常用的发送函数为:HAL_UART_Transmit();
常用的接收函数为:HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
HAL库串口中断调用流程:
发送:
1 printf重映射:
/* printf重映射 */
#include <stdio.h>
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
//具体哪个串口可以更改huart1为其它串口
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1 , 0xffff);
return ch;
}
2 printf发送:
printf("hello \r\n");
float Data=1.11;
printf("Data=%.2f \r\n",Data);
3 Hal库自带发送函数:
#include <stdio.h>
HAL_UART_Transmit(&huart1,"hello\r\n",sizeof("hello\r\n"),0xffff);
uint8_t Data1[]={"hello\r\n"};
HAL_UART_Transmit(&huart1,Data1,sizeof(Data1),0xffff);
uint8_t Databuffer[20]={0};
float Data=1.11;
sprintf(Databuffer,"Data=%.2f \r\n",Data);
HAL_UART_Transmit(&huart1,Databuffer,strlen(Databuffer),0xffff);
中断接收:
1 定长
/*
串口接收中断
定长接收
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&Uart1_RxData,1,0xffff);//原样返回
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
HAL_UART_Receive_IT(&huart1,(uint8_t *)&Uart1_RxData, 1); //&取地址
}
}
2 不定长
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
if(huart == &huart1)
{
if(Uart1_Rx_Cnt >= 255) //溢出判断
{
Uart1_Rx_Cnt = 0;
memset(Uart1_RxBuffer,0x00,sizeof(Uart1_RxBuffer));
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出", 10,0xFFFF);
}
else
{
Uart1_RxBuffer[Uart1_Rx_Cnt++] = Uart1_RxData; //接收数据转存
if((Uart1_RxBuffer[Uart1_Rx_Cnt-1] == 0x0A)&&(Uart1_RxBuffer[Uart1_Rx_Cnt-2] == 0x0D)) //判断结束位\r\n。0x0D是\r,0x0A是\n
{
/* 此处添加用户代码 */
HAL_UART_Transmit(&huart1, (uint8_t *)&Uart1_RxBuffer, Uart1_Rx_Cnt,0xFFFF); //将收到的信息发送出去
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
/* 此处添加用户代码 */
Uart1_Rx_Cnt = 0;
memset(Uart1_RxBuffer,0x00,sizeof(Uart1_RxBuffer)); //清空数组
}
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&Uart1_RxData, 1); //再开启接收中断
}
}
4 KEY
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
3 修改 .h 文件
4 测试
三、其他外设
1 OLED(模拟IIC、模拟SPI)
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。选择IIC的或者SPI的。(模拟IIC和模拟SPI)
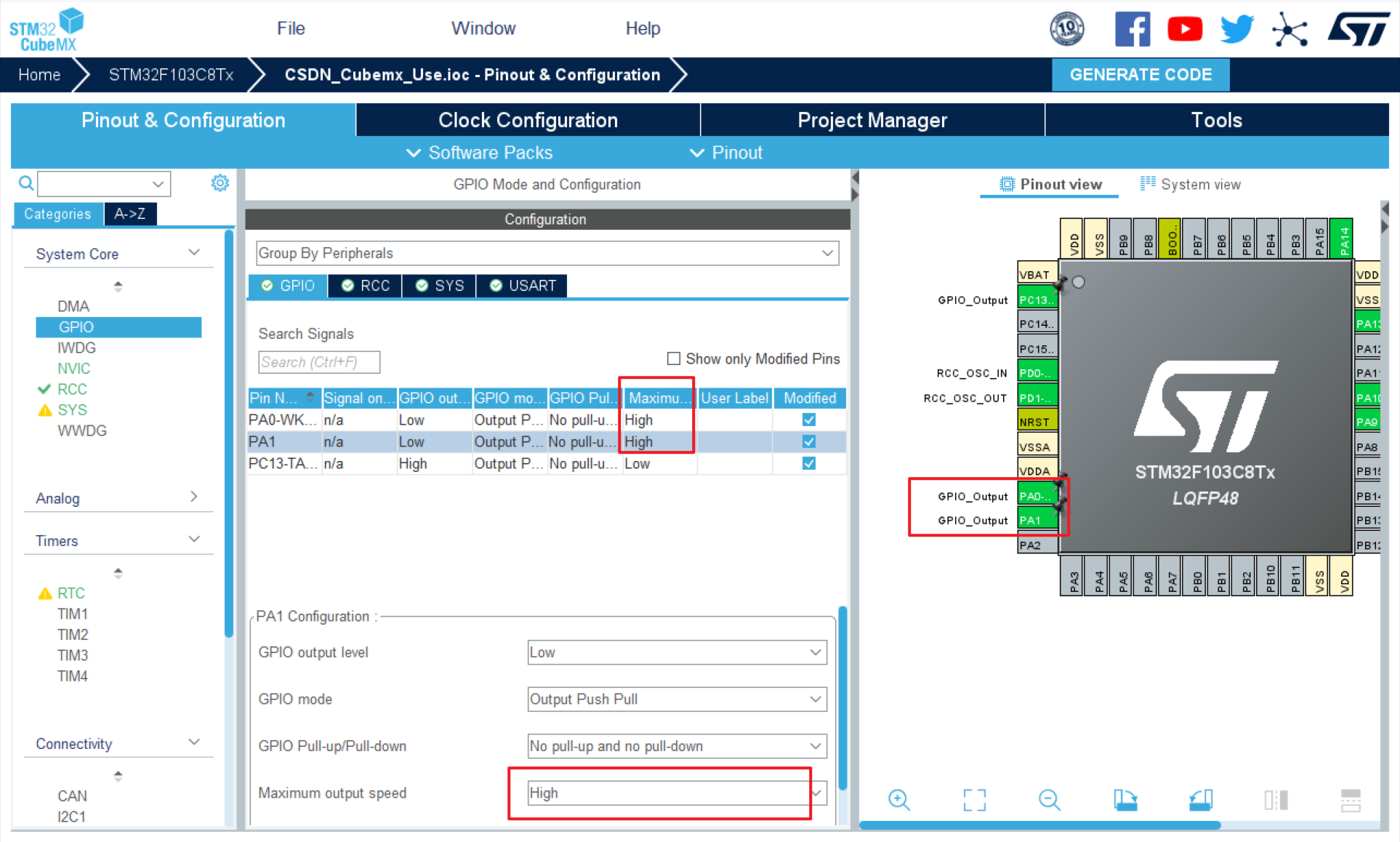
2 Cubemx配置
任选对应OLED引脚个数的GPIO,设置成推挽输出。设置为高速。
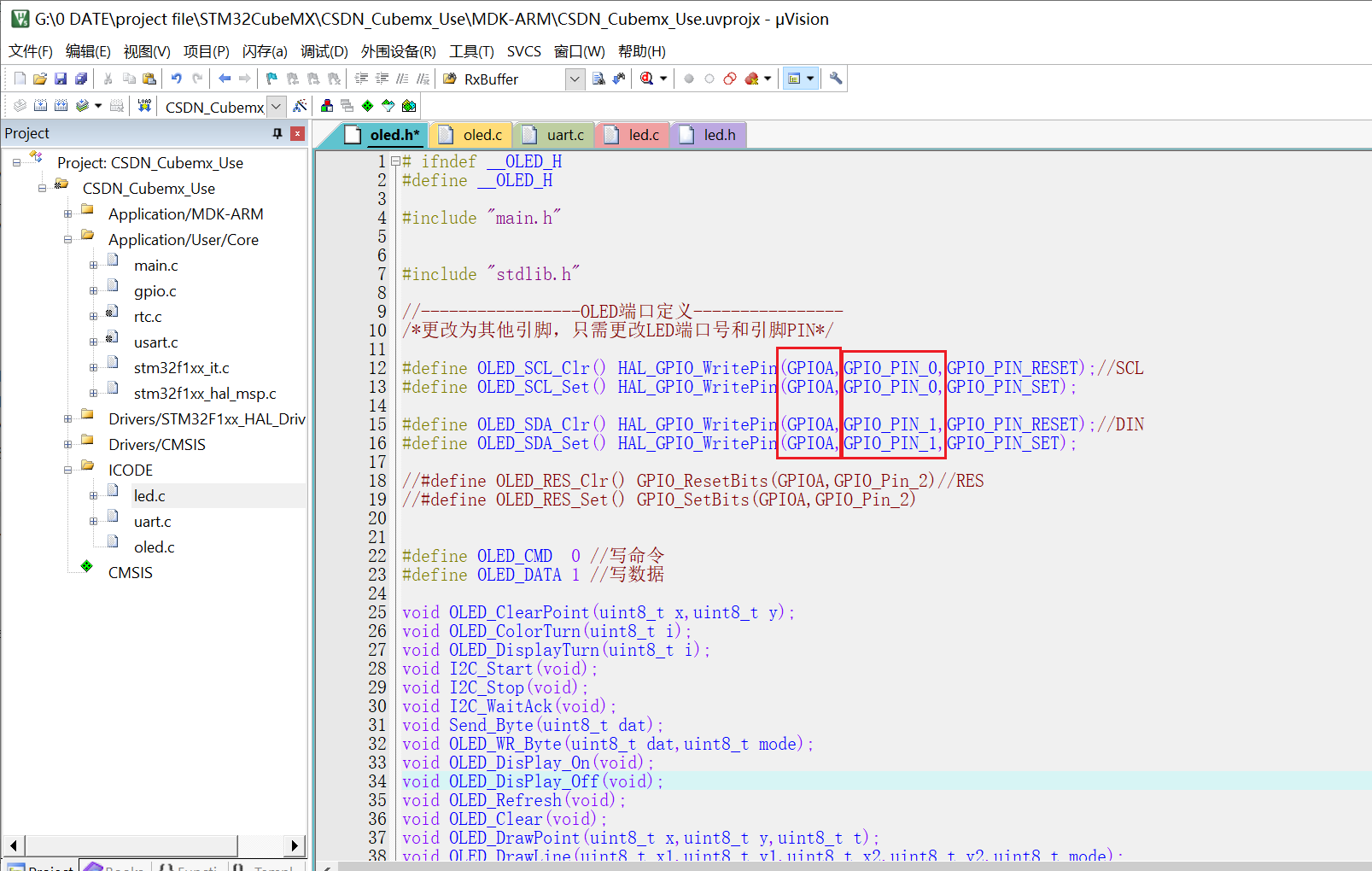
3 修改 .h 文件
更改为其他引脚,只需更改OLED端口号和引脚PIN
4 测试
OLED 显示字体大小 16*16 最合适。能放4行:0 16 32 48。
添加头文件
#include "oled.h"
添加初始化
OLED_Init();
OLED_ColorTurn(0);
OLED_DisplayTurn(0);
1 显示字符:
OLED_ShowString(0,0,"hello",16,1);
OLED_Refresh();
2 显示变量:
uint8_t Databuffer[20]={0};
float Data=1.11;
sprintf(Databuffer,"Data=%.2f \r\n",Data);
OLED_ShowString(0,16,Databuffer,16,1);
OLED_Refresh();
3 显示中文:

2 BH1750光强检测
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
3 修改 .h 文件
4 测试
添加头文件
添加初始化
3 MQ2烟雾检测
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
随意选一个ADC引脚。初始化ADC引脚。
3 修改 .h 文件
4 测试
添加头文件
#include "mq2.h"
采集
uint16_t MQ2_DATA=0;
MQ2_DATA = GetMQ4Value();
3 MQ4甲醛检测
同MQ2,AD读取。
浓度转化函数:
uint16_t GetMQ4Value(void)
{
uint16_t ADCVal;
float Voltage;
uint16_t ppm;
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1,500);
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC))
{
ADCVal = HAL_ADC_GetValue(&hadc1);
}
Voltage = ADCVal * 3.3 / 4096;
ppm = (Voltage - 0.5) / 0.1 * 200;
return ppm;
}
4 DHT11温湿度
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4kFUCvSv-1681004471418)(null)]
2 Cubemx配置
任选一个IO口,配置为高速,推挽输出。
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
随意选择一个IO口。配置为推挽输出,高速。
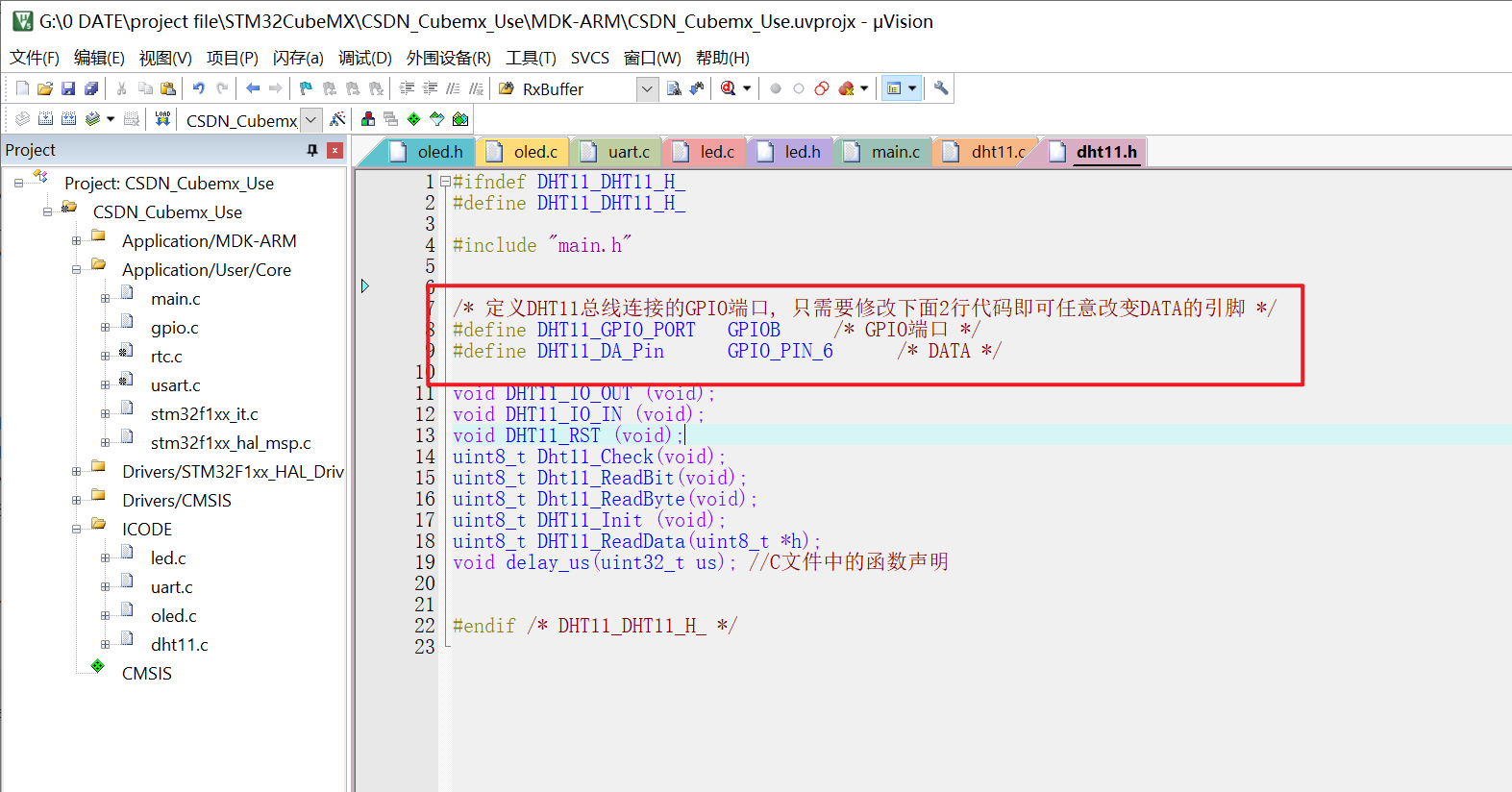
3 修改 .h 文件
定义DHT11总线连接的GPIO端口, 只需要修改下面2行代码即可任意改变DATA的引脚
4 测试
添加头文件
#include "dht11.h"
添加初始化
DHT11_Init(); //DHT11温湿模块初始化
读取温湿度
uint8_t DHT11_DATA[2]={0}; //用于存放DHT11温湿度数据
DHT11_ReadData(DHT11_BUF); //读出DHT11传感器数据(参数是存放数据的数组指针)
printf("湿度:%2d% 温度:%2d℃\r\n",DHT11_BUF[0],DHT11_BUF[1]);//串口打印湿度温度
5 SIM900A GSM模块
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
3 修改 .h 文件
4 测试
添加头文件
添加初始化
6 BMP180气压传感器
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
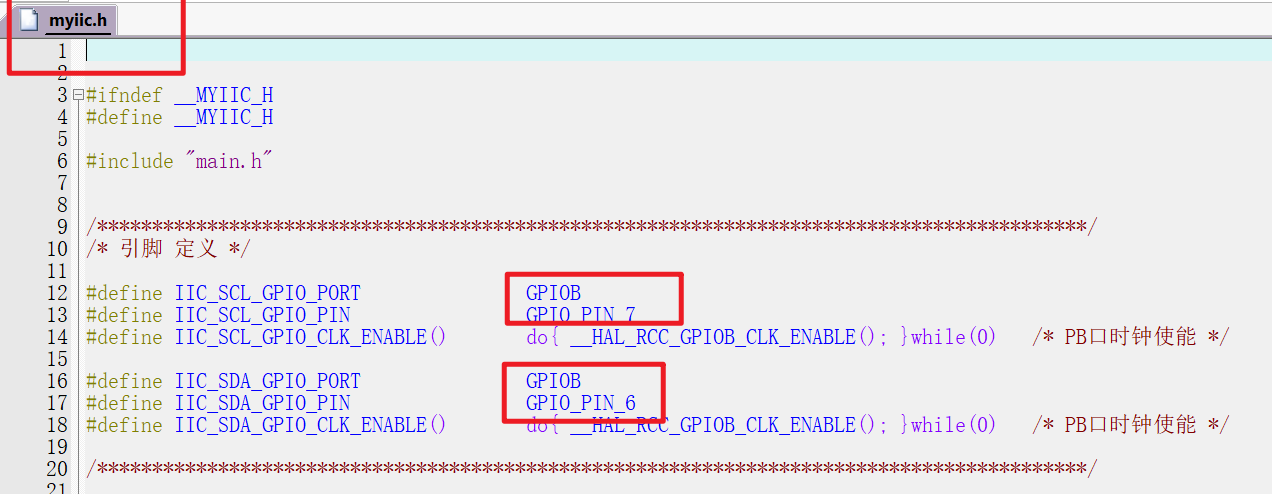
采用模拟IIC,任意选两个io口设置为推挽输出模式。我这边选B7 B6。
配置串口1,重映射printf。
cubemx基本工程和配置看:【HAL库】HAL库STM32cubemx快速使用
3 修改 .h 文件
只需要修改下面2行代码即可任意改变引脚
4 测试
添加头文件
#include "bmp1801.h"
添加初始化
BMP_Init();
BMP_ReadCalibrationData();
读取
uint8_t ID = 0;
ID = BMP_ReadOneByte(0xd0);
BMP_UncompemstatedToTrue();
printf("ID = %d\t temp = %d.%dC\t Pressure = %.2fkPa\t Altitude = %.5fm\r\n",ID,bmp180.Temp/10,bmp180.Temp%10,(float)bmp180.p/1000.0,bmp180.altitude);
HAL_Delay(500);

7 ESP8266+Onenet+HTTP
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
3 修改 .h 文件
4 测试
添加头文件
添加初始化
8 ESP8266+Onenet+MQTT
1 导入.c.h文件(不再赘述,详细见LED部分)
在keil工程中导入之前写好的.c.h文件。
2 Cubemx配置
串口1用于调试,串口3用于ESP8266通信,打开中断。
基础的我就不配置了,可以看前面的详细讲解。
3 修改 .c.h 文件
移植时要修改的地方:
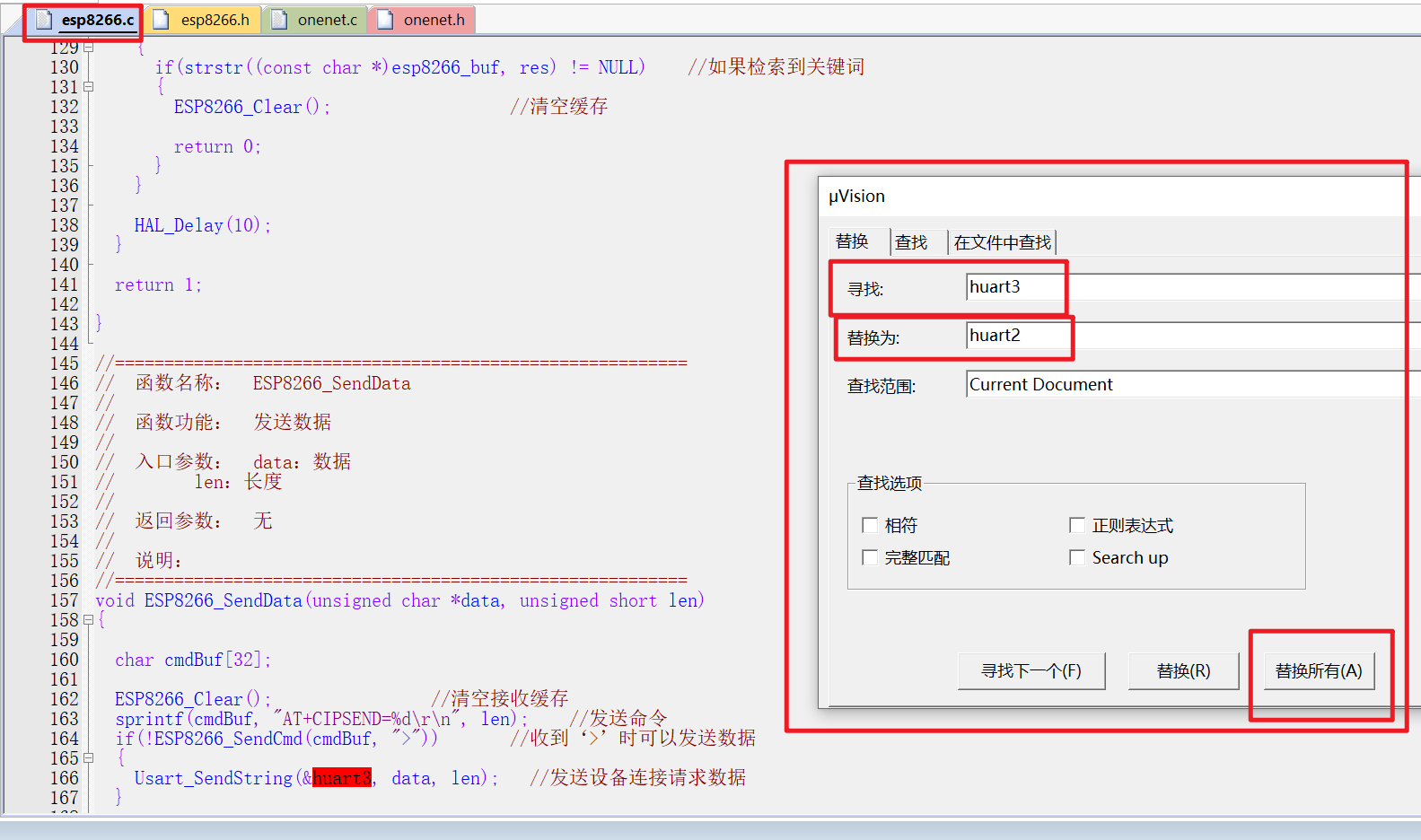
1 改所用串口
发送部分:在esp8266.c里,将huart3全部替换为要修改的串口号,比如串口2。
接收部分:用串口中断接收esp8266发来的消息。随便在哪个文件夹填加串口回调函数,我个人是之前专门建了个uart.c文件放串口相关的所有代码。
加入下面的代码(串口号根据个人情况修改)
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart3)
{
if(esp8266_cnt >= sizeof(esp8266_buf))
{
esp8266_cnt = 0;
}
esp8266_buf[esp8266_cnt++] = Uart3_RxData;
HAL_UART_Receive_IT(&huart3,(uint8_t *)&Uart3_RxData, 1);
}
}
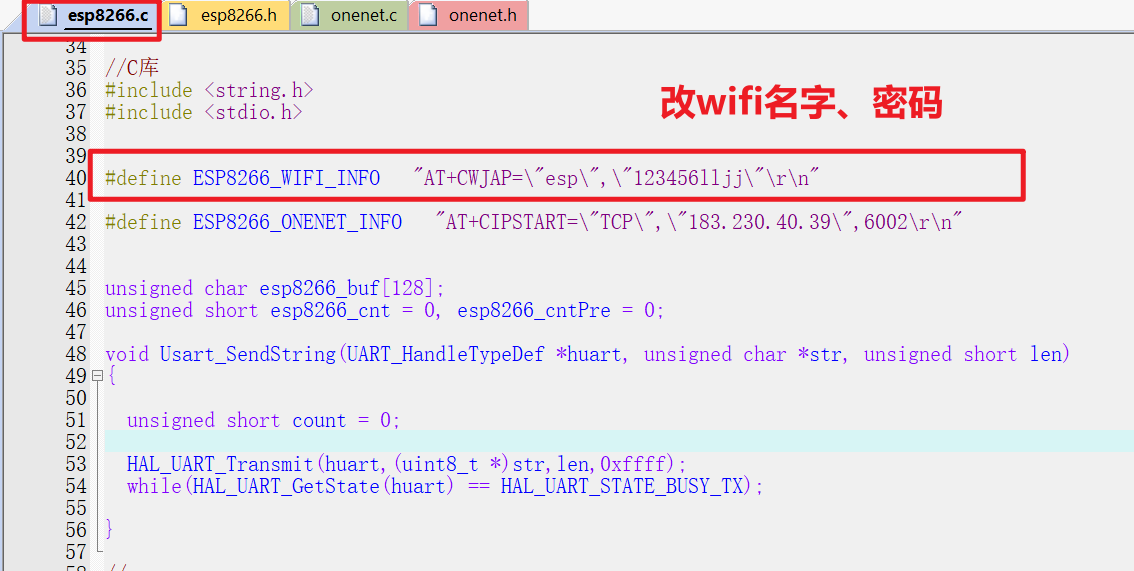
2 改wifi名字和密码
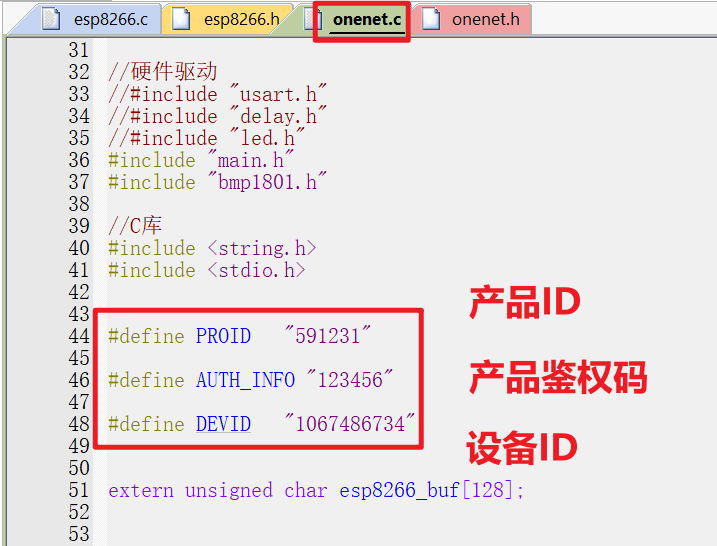
3 改产品ID、设备ID、鉴权信息。
4 测试
添加头文件
#include "onenet.h"
#include "esp8266.h"
添加初始化
别忘了开串口中断。
HAL_UART_Receive_IT(&huart3,(uint8_t *)&Uart3_RxData, 1);
HAL_Delay(2000);
ESP8266_Init();
HAL_Delay(2000);
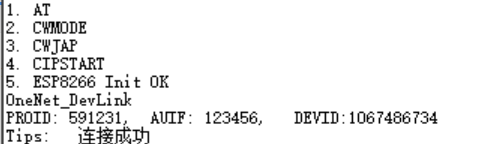
while(OneNet_DevLink())
HAL_Delay(2000);
连接成功的话,onenet会显示设备在线。串口也会打印成功。

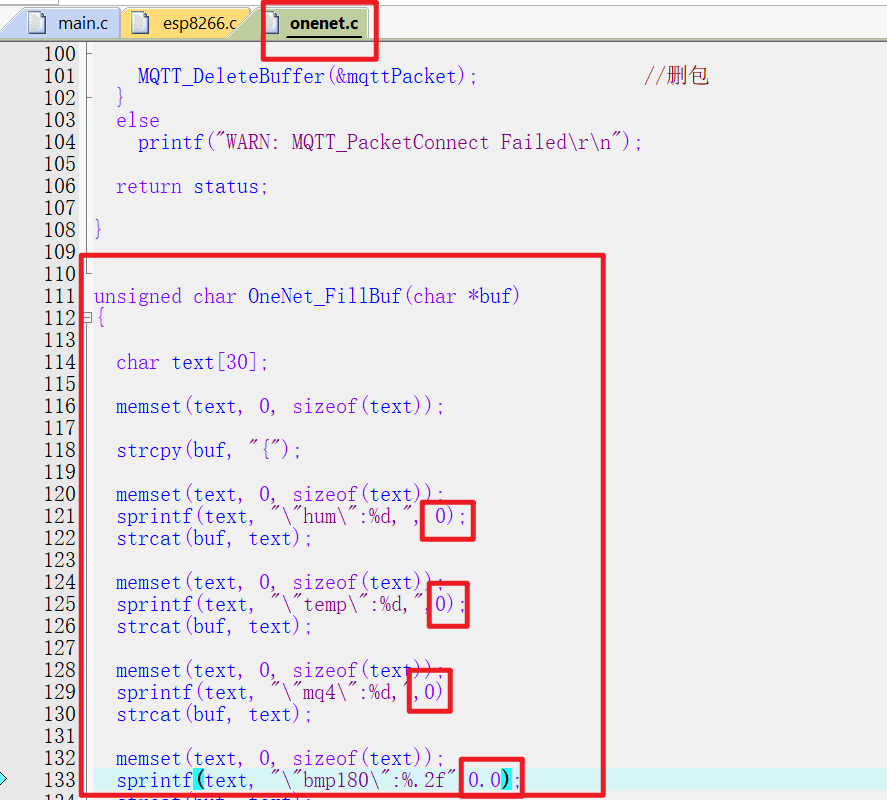
发送数据
OneNet_SendData(); //发送数据
ESP8266_Clear(); //清空数据缓存区
HAL_Delay(3000); //3s发送一次

要发什么数据,在这里改:
接收数据
dataPtr = ESP8266_GetIPD(0);
if(dataPtr != NULL)
OneNet_RevPro(dataPtr);
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)