1.决策树
决策树是一种用于对实例进行分类的树形结构。
Hunt算法是一种采用局部最优策略的决策树构建算法,它同时也是许多决策树算法的基础,包括ID3、C4.5和CART等。
Hunt算法的递归定义如下:
(1) 如果  中所有记录都属于同一个类,则 t 是叶结点,用
中所有记录都属于同一个类,则 t 是叶结点,用  标记。
标记。
(2) 如果 中包含属于多个类的记录,则选择一个属性测试条件(attribute test condition),将记录划分成较小的子集。对于测试条件的每个输出,创建一个子女结点,并根据测试结果将 中的记录分布到子女结点中。然后,对于每个子女结点,递归地调用该算法。
需要附加的条件来处理以下的情况:
- 算法的第二步所创建的子女结点可能为空,即不存在与这些结点相关联的记录。如果没有一个训练记录包含与这样的结点相关联的属性值组合,这种情形就可能发生。这时,该结点成为叶结点,类标号为其父结点上训练记录中的多数类。
- 在第二步,如果与相关联的所有记录都具有相同的属性值(目标属性除外),则不可能进一步划分这些记录。在这种情况下,该结点为叶结点,其标号为与该结点相关联的训练记录中的多数类。
在决策过程中,对于特征的选择还是比较重要的。随机选择显然是不好的,因此,我们定义了信息增益和信息增益比两个指标来指导特征选择。
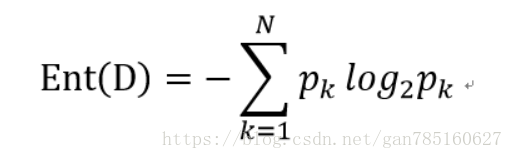
信息熵的定义:
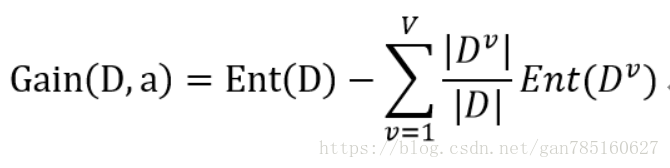
信息增益的定义:
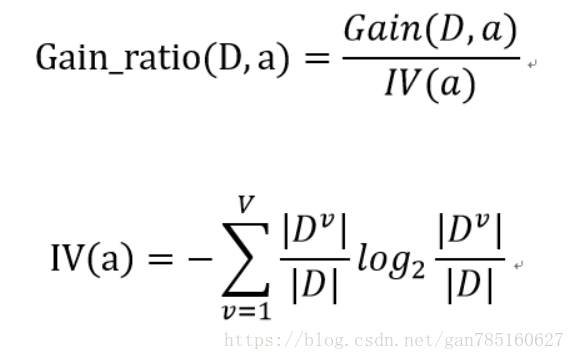
信息增益率定义:
ID3算法应用了信息增益来选择特征 。
C4.5算法与上边的ID3算法非常相似,唯一的不同是,ID3算法是用信息增益来选择特征,而C4.5算法使用信息增益率来选择特征。在使用信息增益作为训练数据集特征时会偏向于取值较多的特征,而用信息增益率则避免了这一问题。
CART生成算法与C4.5算法相类似,它与C4.5算法的主要区别是使用基尼系数进行属性选择。
剪枝
作为决策树中一种防止Overfitting过拟合的手段,分为预剪枝和后剪枝两种。
预剪枝:当决策树在生成时当达到该指标时就停止生长,比如小于一定的信息获取量或是一定的深度,就停止生长。
后剪枝:当决策树生成完后,再进行剪枝操作。优点是克服了“视界局限”效应,但是计算量代价较大。
决策树优点:
直观,便于理解,在相对短的时间内能够对大型数据源做出可行且效果良好的结果,能够同时处理数据型和常规型属性。
决策树缺点:
可规模性一般,连续变量需要划分成离散变量,容易过拟合。
2.随机森林(RF)
随机森林就是通过集成学习的思想将多棵树集成的一种算法,它的基本单元是决策树,而它的本质属于机器学习的一大分支——集成学习(Ensemble Learning)方法。
随机森林中的每个决策树独立预测,然后对所有决策树的预测结果进行投票,将若干个弱分类器的分类结果进行投票选择,从而组成一个强分类器,这就是随机森林bagging的思想。
特点:
1)在当前所有算法中,具有极好的准确率。
2)能够有效地运行在大数据集上。
3)能够处理具有高维特征的输入样本,而且不需要降维。
4)能够评估各个特征在分类问题上的重要性。
5)在生成过程中,能够获取到内部生成误差的一种无偏估计。
6)对于缺省值问题也能够获得很好得结果。
每棵树的按照如下规则生成:
1)如果训练集大小为N,对于每棵树而言,随机且有放回地从训练集中的抽取N个训练样本(这种采样方式称为bootstrap sample方法),作为该树的训练集;
2)如果每个样本的特征维度为M,指定一个常数m<<M,随机地从M个特征中选取m个特征子集,每次树进行分裂时,从这m个特征中选择最优的;
3)每棵树都尽最大程度的生长,并且没有剪枝过程。
随机森林分类效果(错误率)与两个因素有关:
- 森林中任意两棵树的相关性:相关性越大,错误率越大;
- 森林中每棵树的分类能力:每棵树的分类能力越强,整个森林的错误率越低。
减小特征选择个数m,树的相关性和分类能力也会相应的降低;增大m,两者也会随之增大。所以关键问题是如何选择最优的m(或者是范围),这也是随机森林唯一的一个参数。
3.朴素贝叶斯
基于概率论的分类算法,通过考虑特征概率来预测分类。
 贝叶斯法则
贝叶斯法则
假如我们有c0和c1两个类,给定一个数据,它的特征为x1,x2,x3,我们求这个数据属于哪个类。
首先我们需要求p(c0|x1,x2,x3)和p(c1|x1,x2,x3)哪个更大,如果p(c0|x1,x2,x3)更大,则该数据属于c0类,反之属于c1类。
但是p(c0|x1,x2,x3)不好求解,所以我们利用贝叶斯法则将其转化为求解陪p(x1,x2,x3|c0)、p(c0)、p(x1,x2,x3)的问题。
引用《决策树简述》
引用《数据挖掘十大算法之决策树详解(1)》
引用《决策树 (Decision Tree) 原理简述及相关算法(ID3,C4.5)》
引用《随机森林(Random Forest)》
引用《带你搞懂朴素贝叶斯分类算法》
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)