QGroundControl下载https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html本博主下载及安装的为Mac OSX版本:QGroundControl.dmg.
一、PixHawk飞控配置安装及配置
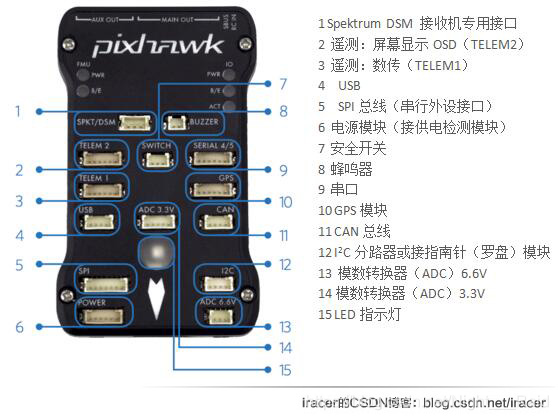

switch 安全开关; buzzer 蜂鸣器,telem1数传; gps+l2C GPS ,power 电源变压器,Main Out1-8为电调插口,四旋翼电调1234 :1号电机右上方,2号电机左下方,3号电机左上方,4号电机右下方,遥控器信号接收器:RC .左手为油门和偏航 throttle and yaw,右手为滚转和俯仰 pitch and roll。
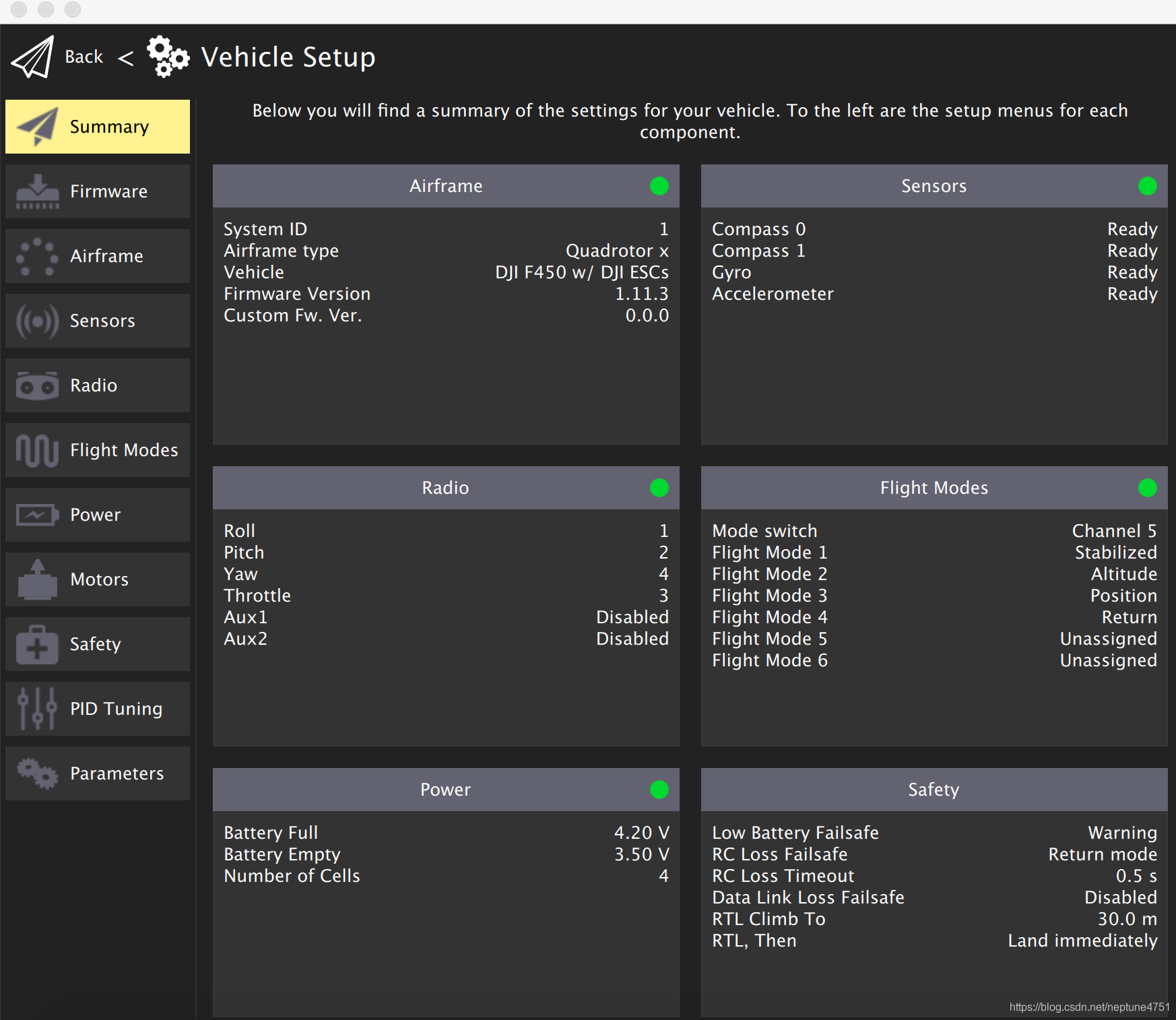
地面站安装成功后界面为:

链接网络升级固件:

校准各传感器以及遥控器等选项之后,校准成功的状态绿色:
根据自己的情况选择自己的机型,本文使用的四旋翼x型:

校准传感器,包括罗盘、陀螺仪、加速度计等。参考链接https://docs.qgroundcontrol.com/master/en/SetupView/SetupView.html。

校准遥控器:点击calibrate-->next,

根据遥控器设置通道模式,最常用的飞行模式为:自稳(稳定)Stabilize、定点(悬停)(Loiter)和返航(RTL),
高度位置:altitude 角度控制:stabilized 水平位置:position 详见官网:http://docs.px4.io/master/en/flight_modes
根据实际遥控器的类型,将左二设置为1,右上左一可以有1,2,3种模式,同理设置为2同样有三种模式。

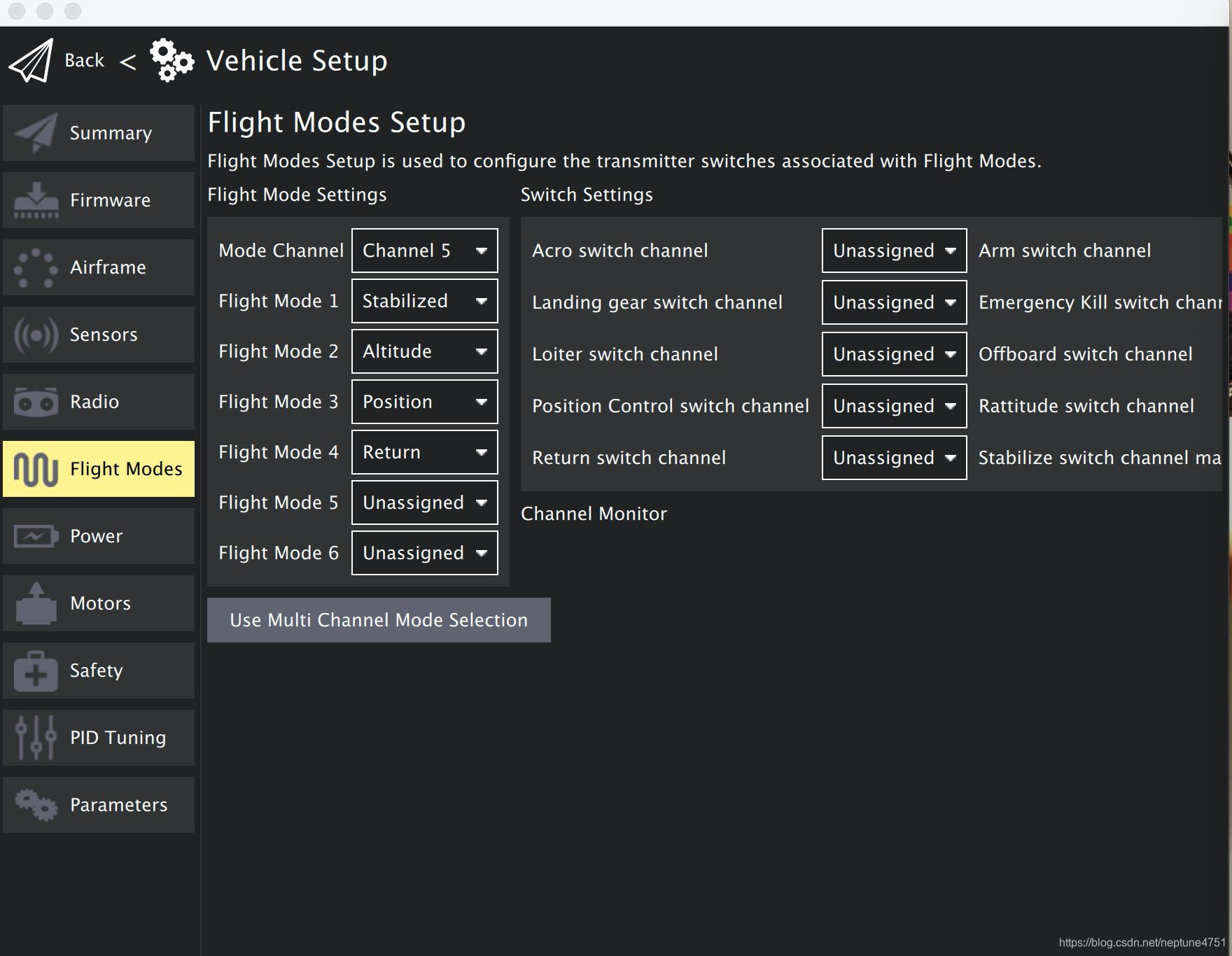
设置模式通道:channel5
飞行模式1 为 stabilized 模式2 为Altitude (定高),模式3为Position 定点模式,模式4为return返航模式。设定模式时,可以使用channel monitor查看实际对应通道。
校准电池:修改参数:数量为4,最大容量:4.20,校准电调使得四个电机同步,使用USB链接,校准的时候需要插上电池,修改完参数拔插电池完成设置。
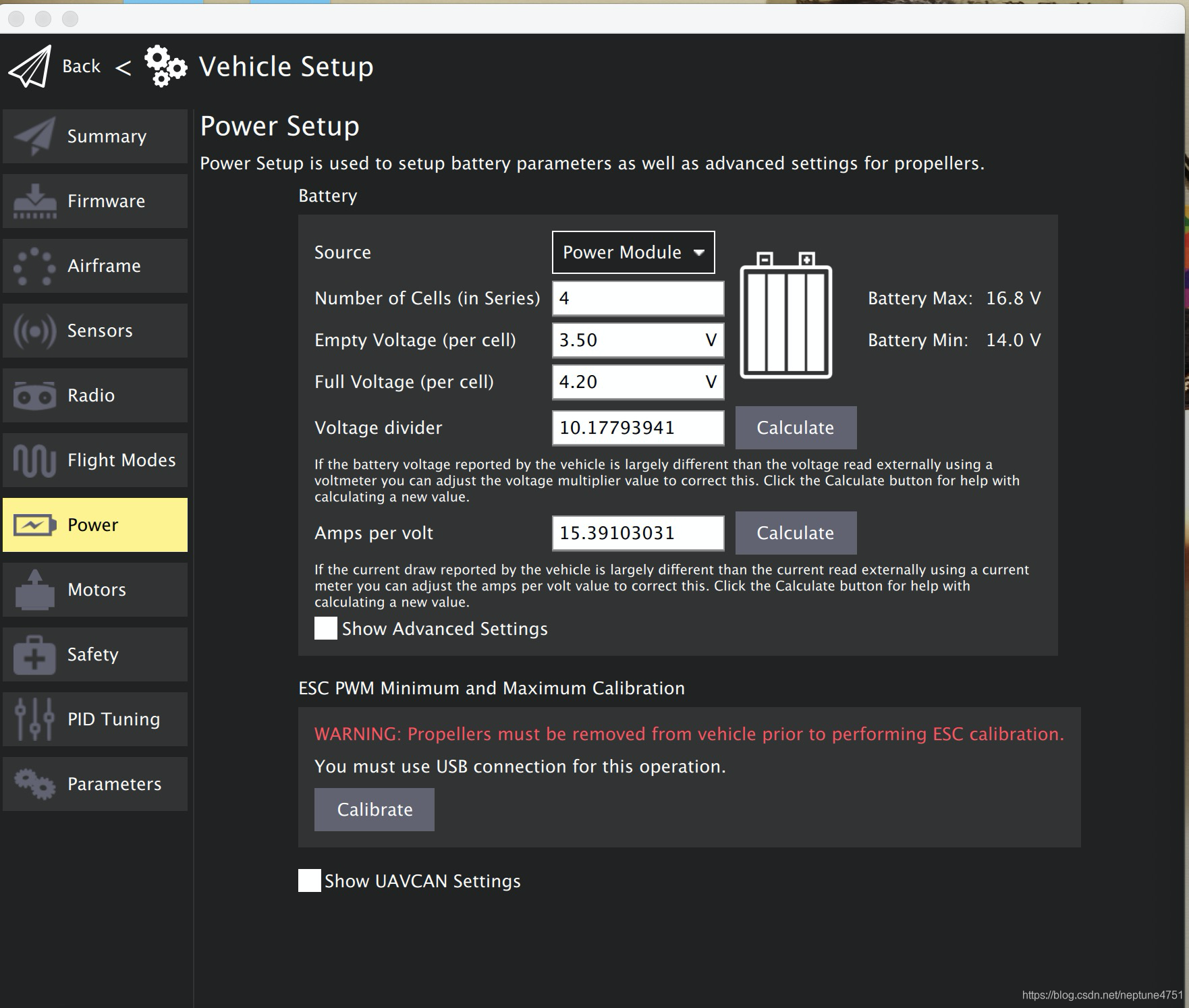
完成标定之后,如果出现怠速问题(即解锁电机就转动),修改PWM_MIN参数为最小值。
若出现avionics power low 则修改参数 CBRK_SUPPLY参数为最大值。
另外,重要的一点:当需要启动飞行时候,需要拔掉USB连接线(因为USB为调试模式)使用数传进行传输,否则没有办法解锁飞行。
按安全开关,然后将油门打到右下角即可完成解锁可以飞行。
参考:
https://www.bilibili.com/video/BV1M54y1R71u?from=search&seid=12459169615613577131
https://blog.csdn.net/wendox/article/details/52329519
https://docs.qgroundcontrol.com/master/en/SetupView/SetupView.html
https://blog.csdn.net/Night___Raid/article/details/106482128
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)