Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
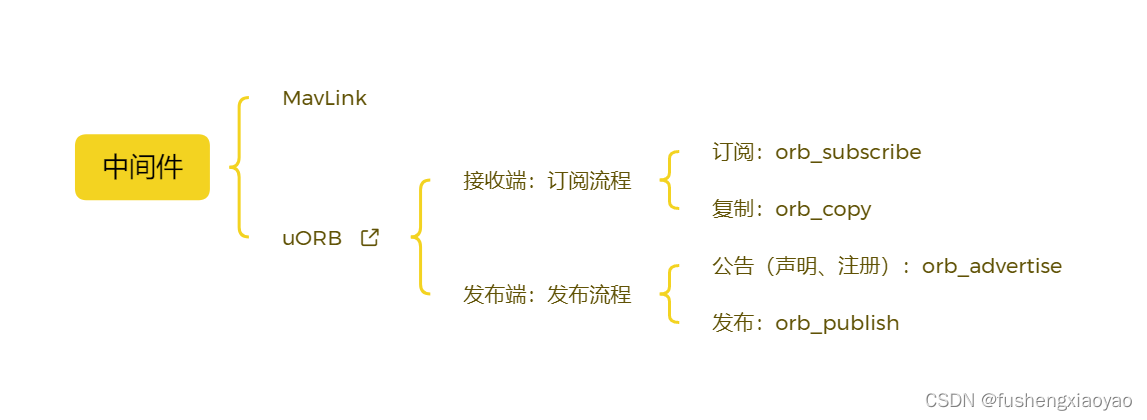
PX4项目学习::(四)中间件::通信:uORB
2023-05-16
PX4代码学习系列博客(4)——uORB相关 - 灰信网(软件开发博客聚合) (freesion.com)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
PX4
uORB
项目学习
PX4项目学习::(四)中间件::通信:uORB 的相关文章
PX4 SITL Gazebo 仿真时 libgazebo_multirotor_base_plugin 插件运行时出错
PX4 SITL Gazebo 仿真时 libgazebo multirotor base plugin 插件运行时出错 问题描述原因分析解决办法总结 问题描述 在 Gazebo 中进行 PX4 的软件在环仿真时 xff0c 执 make
Nuttx下移植uorb笔记
Nuttx下移植uorb笔记 之前接触过ros下的消息机制 xff08 生产者 消费者 xff09 模型 xff0c 第一感觉是灵活好用 xff0c 但是在资源有限的嵌入式环境里面 xff0c 邮箱 消息 显得就有点不那么灵活 xff0c
Ubuntu18.04安装PX4踩坑、报错及解决方案整理
笔者最近需要跑无人机巡检大坝的仿真 xff0c 于是在自己的Ubuntu2018 04中开始安装PX4 xff0c 问过不少之前已经装过PX4的师兄和同学 xff0c 都曾在PX4安装过程中踩过许多坑 xff0c 耗费了不少时间 xff0c
飞行机器人(七)仿真平台XTDrone + PX4编译
0 编译PX4固件 参考仿真平台基础配置教程 xff08 中文详细教程 xff09 仿真平台基础配置 语雀 yuque com https www yuque com xtdrone manual cn basic config 按照教程
[pixhawk笔记]6-uORB流程及关键函数解析
本文中将结合代码 文档及注释 xff0c 给出uORB执行流程及关键函数的解析 xff0c 由于uORB的机制实现较为复杂 xff0c 所以本文主要学习如何使用uORB的接口来实现通信 回到上一篇笔记中的代码 xff1a include l
PX4 GAZEBO无人机添加相机并进行图像识别
PX4 GAZEBO无人机添加摄像头并进行图像识别 在之前完成了ROS的安装和PX4的安装 xff0c 并可以通过roslaunch启动软件仿真 接下来为无人及添加相机 xff0c 并将图像用python函数读取 xff0c 用于后续操作
UORB
转载地址 xff1a http blog arm so armteg pixhawk 183 0503 html Pixhawk 飞控 系统是基于ARM的四轴以上飞行器的飞行控制器 xff0c 它的前身是PX4 IMU xff0c Pixh
PX4 Bootloader下载及编译过程中的问题解决
买来的雷迅的板子都是Bootloader已经烧进去了 xff0c Fireware也已经刷进去了 如果是自制的板子 xff0c 上位机根本没法识别板子 xff0c 必须先烧写下载Bootloader后编译好的bin文件 这篇记一下自己下载及
PX4 ---- Mixer
文章目录 Mixer 混合控制 作用输入输出装载混控文件MAVROS代码解析总结示例MAINAUX Mixer 混合控制 作用 经过位置控制和姿态控制后 xff0c 控制量通过 actuator controls发布 xff0c 其中 co
PX4 -- EKF2
文章目录 EKF2参数高度估计Range Finder滤波 单变量更新单变量更新对多变量的影响 EKF2 参数 EKF2 中有一类 GATE 参数 当测量值在 VAR GATE 范围内才会更新值 高度估计 四种高度控制方法 xff1a 气压
PX4模块设计之一:SITL & HITL模拟框架
PX4模块设计之一 xff1a SITL amp HITL模拟框架 1 模拟框架1 1 SITL模拟框架1 2 HITL模拟框架 2 模拟器类型3 MAVLink API4 总结 基于PX4开源软件框架简明简介的框架设计 xff0c 逐步分
PX4模块设计之六:PX4-Fast RTPS(DDS)简介
64 TOC PX4模块设计之六 xff1a PX4 Fast RTPS DDS 简介 基于PX4开源软件框架简明简介的框架设计 xff0c 逐步分析内部模块功能设计 PX4 Fast RTPS DDS 具有实时发布 订阅uORB消息接口
PX4模块设计之三十三:Sensors模块
PX4模块设计之三十三 xff1a Sensors模块 1 Sensors模块简介2 模块入口函数2 1 主入口sensors main2 2 自定义子命令custom command2 3 模块状态print status 重载 3 Se
关于github px4 gps 驱动的开发的总结
源码编译上边已经写过文章了 遇到的几个问题 1 解决虚拟机不能共享文件夹的问题 一开始虚拟机的更新 vmware tools 是灰色的 xff0c 不能点 xff0c 然后通过关掉虚拟机 xff0c 然后再开启的时候 xff0c 在没有启动
Px4源码框架结构图
此篇blog的目的是对px4工程有一个整体认识 xff0c 对各个信号的流向有个了解 xff0c 以及控制算法采用的控制框架 PX4自动驾驶仪软件 可分为三大部分 xff1a 实时操作系统 中间件和飞行控制栈 1 NuttX实时操作系统 提
px4下载指定版本的固件、git用法
https hub fastgit org PX4 PX4 Autopilot git describe tag 查看当前版本号 git tag l 查看所有版本 xff0c 也就是打个tag git checkout v1 9 1 跳转到
PX4 OffBoard Control
终于还是走上了这一步 xff0c 对飞控下手 xff0c 可以说是一张白纸了 记录一下学习的过程方便以后的查阅 目录 一 ubuntu18 04配置px4编译环境及mavros环境 二 PX4的OffBoard控制 1 搭建功能包 2 编写
四、无人机知识笔记(初级:基本运动原理)
笔记来源于 沈阳无距科技 工业级无人机的中国名片 编程外星人 目录 一 多旋翼直升机 二 基本飞行姿态 三 多旋翼飞行原理 四 反扭力与偏航运动 五 螺旋桨 六 有刷电机和无刷电机 七 电调与PWM信号 八 动力电池 九 遥控器 十 机架设
2020DCIC智慧海洋建设算法赛学习01-赛题北京及地理数据分析常用工具
序 本系列的博客旨在学习2020DCIC智能算法赛 智慧海洋建设的优秀方案 对地理数据分析问题积累一些思路和经验 作为这一系列博客的开篇 这篇博客主要内容包括对赛题的解析和对项目中会用到的一些常用的地理数据分析工具的简要介绍 1 赛题背景
colab 导出csv文件
生成之后download即可 from google colab import files files download train csv
随机推荐
VScode: “无法打开源文件 xxxx.h”
原因 xff1a 缺文件 报错的文件中引用的文件 xff0c 层层索引进去 xff0c 有缺的 解决办法 xff1a 更新子模块 xff1b 重新下载源代码 xff1b 找到没有的文件 xff0c 从新的源码中复制缺失的文件 xff08 比
git clone PX4 环境配置与问题记录
仿真平台基础配置 yuque com 前言 使用ubuntu下载ros px4似乎是一件十分繁琐以及困难的事情 xff0c 但是本人经过了参考大量链接 xff0c 成功安装好后 xff0c 发现这件事情其实并非难事 许多安装指导链接发布于一
SSH工作原理&Ubuntu20.04安装并配置SSH&设置SSH免密登录
目录 一 SSH的介绍 xff08 服务器端 xff0c 客户端 xff09 1 SSH 远程连接工具 连接原理 xff1a 2 SSH的安全机制 3 两种级别的验证方法 xff08 登录方法 xff09 二 ssh的安装与启动 1 安装
SSH使用问题:无法免密登录
一 排查服务器端 1 检查authorized keys文件权限 xff0c 并设置为700 chmod 700 authorized keys 2 检查 etc ssh sshd config文件 sudo vim etc ssh ssh
PX4项目学习::(一)项目架构
目录 序 xff1a 项目整体嵌入式架构 xff1a 无人机方面做嵌入式编写的飞控总结 1软件 xff1a 2硬件 xff1a 1 PX4 Pixhawk的软件体系结构 2 下图所示为PX4的算法顶层架构 左边是整个飞控系统的控制功能实现
PX4项目学习::(七)飞控栈:导航(Navigator和mission控制)
25条消息 PX4飞控之导航及任务架构 Felix ZL的博客 CSDN博客
微策略春招面试总结
春季招聘时我报的研发岗 xff0c 由于我不是杭州本地人 xff0c 故首先接到的是电话面试 xff0c 电话面试大概一周左右被通知去杭州总部面试 下面主要简述一下面试的内容 第一面是技术面 xff0c 大概持续近一个小时 首先面试官会照着
PX4项目学习::(六)CMakeLists.txt 文件剖析
27条消息 PX4 CMakeLists txt 文件剖析 lipi37的博客 CSDN博客 px4 cmake makefile介绍 跟我一起写Makefile 1 0 文档 seisman github io 57条消息 PX4编译文件
PX4项目学习::(七)飞控栈算法梳理
无人机算法分为三种 xff0c 分别为捷联式惯性导航系统 滤波算法和估计算法 xff08 卡尔曼滤波器 xff09 飞行控制算法 xff08 PID算法 xff09 Px4控制算法综述 1commander和navigator产生期望位置
PX4项目学习::(七)驱动(src-->drivers)
PX4的spi驱动 xff0c nuttx的spi硬件抽象 古月居 guyuehome com 无人机中级篇 xff1a 第四讲 xff1a 系统级驱动程序开发 知乎 zhihu com 无人机中级篇 xff1a 第五讲 xff1a 用应级
PX4:二次开发:流程
1 程序编写 xff08 用模板简单实现一个程序 xff09 gt 进阶 xff1a 不同项目下的程序规范 xff1b 调用子模块的流程 2 在Nuttx系统中注册应用并编译 为了使该程序能够编译进固件 xff0c 需要在系统的cmake文
原理::定位与导航::IMU和GPS融合原理(无人驾驶)
41条消息 动手学无人驾驶 xff08 6 xff09 xff1a 基于IMU和GPS数据融合的自车定位 自动驾驶小学生的博客 CSDN博客 41条消息 重读经典 Quaternion kinematics for the error st
系统使用:vmware虚拟机如何不占用c盘
42条消息 vmware放在D盘占用C盘空间 vmware虚拟机如何不占用c盘 wendychow001的博客 CSDN博客
无人机学习指南
学什么 xff1f 理论与开发 理论 xff1a 控制栈的原理与算法 43 通信 目的 xff1a 了解无人机的本质 知识解决的是 why 如果你遇到的问题通常是 xff0c 为什么要用欧拉角 xff1f 为什么要用滤波 xff1f 那说明
PX4项目学习::(八)无人机仿真综述(介绍)
xff08 一 xff09 仿真平台 xff1a 物理化仿真平台 xff1a xff08 world 43 node xff1a 使用基础模块搭建环境 xff08 world environment xff09 与plant xff09 飞
PX4项目学习::(一)项目介绍::源码目录介绍
代码目录 xff1a 1 boards 各种飞控硬件平台的配置文件 2 build 编译产生的目录 xff0c make之后生成的文件放置在这个目录 3 cmake cmake编译配置目录 4 Documentation 开发者文档目录 x
PX4项目学习::(三)Nuttx操作系统
50条消息 PX4代码解析 4 超级菜狗的博客 CSDN博客 px4代码解析
Jetson TX2使用记录
Jetson TX2使用记录 一 配置二 工具1 安装jtop2 安装文件同步工具3 I2C4 ssh5 模块温度 三 自启动1 自启动优化2 自启动设置1 设置WiFi开机自动连接2 设置开机自动登录 用以远程 3 应用软件自启动 3 桌
packages.xml分析
data system packages 1 data system packages list 记录安装app的信息 code com android cts priv ctsshim 10028 0 data user 0 com an
PX4项目学习::(四)中间件::通信:uORB
PX4代码学习系列博客 4 uORB相关 灰信网 xff08 软件开发博客聚合 xff09 freesion com
热门标签
bignum
microstack
ionicreact
mattab
pathauto
tryparse
ggspatial
paypalsoap
revmobads
revmob
qt47