摘要
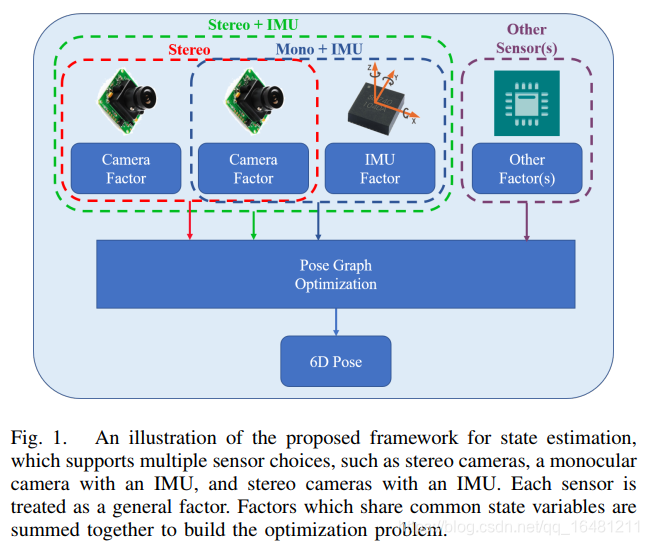
为了提高机器人的鲁棒性和自主性,越来越多的传感器被安装在机器人上。我们已经看到了不同平台上安装的各种传感器套件,例如地面车辆上的立体摄像机、手机上带有IMU(惯性测量单元)的单目摄像机以及空中机器人上带有IMU的立体摄像机。虽然过去已经提出了许多状态估计算法,但它们通常应用于单个传感器或特定的传感器套件。它们中很少有能用于多传感器的情况。本文提出了一种通用的基于优化的多传感器里程估计框架。在我们的框架中,每个传感器都被视为一个通用因素。将共享公共状态变量的因子相加构建优化问题。我们进一步演示了视觉和惯性传感器的通用性,它们构成了三个传感器套件(立体摄像机、带IMU的单目摄像机和带IMU的立体摄像机)。我们在公共数据集上验证了系统的性能,并且通过多个传感器的真实实验。将结果与其他最新算法进行了比较。我们的系统是一个通用的框架,可以很容易地融合各种传感器在一个位姿图中优化。我们的算法是开源的。
I 综述
实时六自由度(degrees of freedom)状态估计是机器人技术的一项基础技术。精确的状态估计在机器人探索、自主驾驶、虚拟现实和增强现实等智能应用中发挥着重要作用。我们在这些应用中最常用的传感器是摄像头。近几十年来,人们提出了大量基于视觉的位姿估计算法,如[1]-[5]。除
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)