文章目录
- 前言
- 一、添加文件到QGC工程
- 二、添加界面
- 三、QML和C++交互
- 四、信号与槽
- 五、测试
前言
QGC 4.2.4
一、添加文件到QGC工程
在qgroundcontrol/src目录下创建SimpleTest文件夹
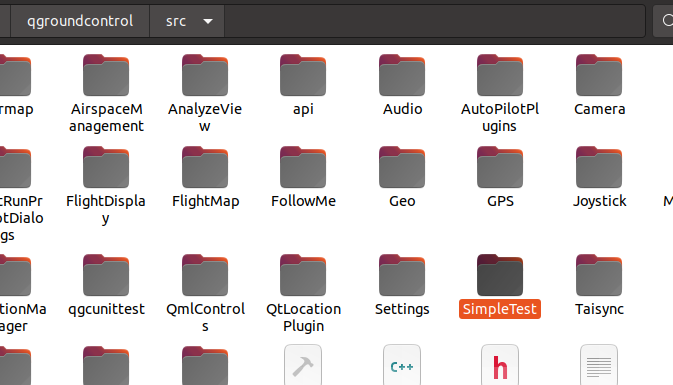
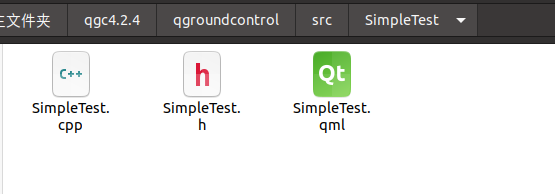
在文件夹中创建SimpleTest.cpp、SimpleTest.h和SimpleTest.qml三个文件
在qgroundcontrol.pro中添加下图位置添加src/SimpleTest/SimpleTest.h\
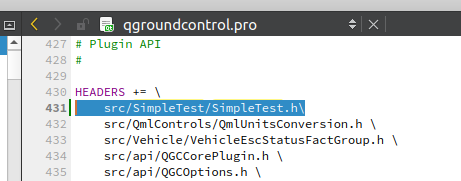
下图位置添加src/SimpleTest/SimpleTest.cpp\
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)