之前电脑注册的时候命名为中文,但在装很多软件时就会出现很多奇奇怪怪的问题,查了之后发现可能是因为系统的中文名造成的,因此在之后可能就需要修改。
之前在网上找到比较常见的两种方法都不适用于Win10家庭版。
方法1
网上给的大多数方式是右键“此电脑”,点击管理->系统工具->本地用户和组->用户,此时右侧则会出现原有用户名,右键重命名即可。

方法2
另一种方法是“windows+x”键,点击计算机管理,之后步骤与之前相同
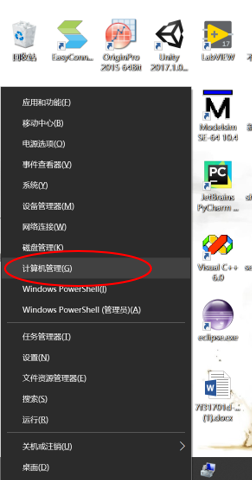
适合win10家庭版的方法
然而对于windows家庭版,计算机管理里并没有,也不能加入本地用户和组。这就需要采用下面的方法。
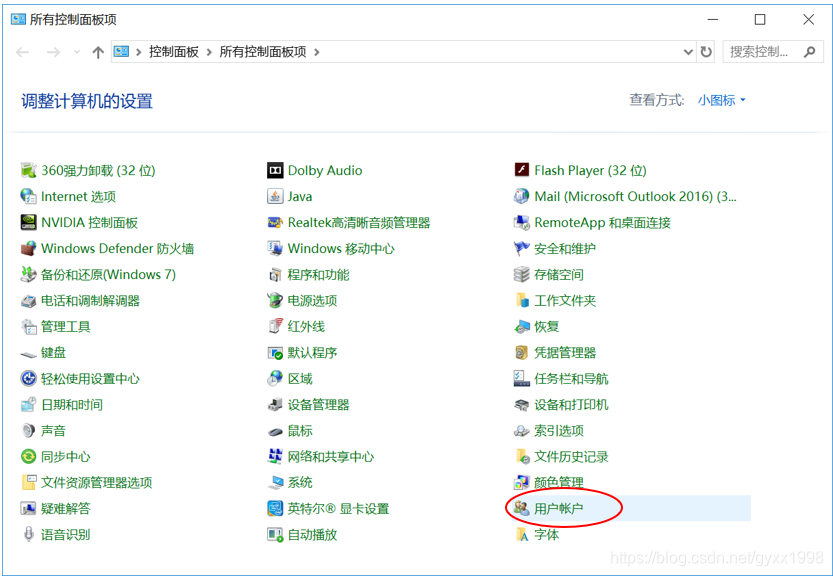
1、修改账户名
进入控制面板->用户账户->更改账户名称
修改后,即可看到电脑登录界面用户名称已改。但是C盘下的用户文件却仍然为原名字。

2、进入Administrator模式修改文件名
切换到Administrator用户,第一次会有一段的等待时间,如果之前使用过Administrator模式可跳过此段,具体方法如下:
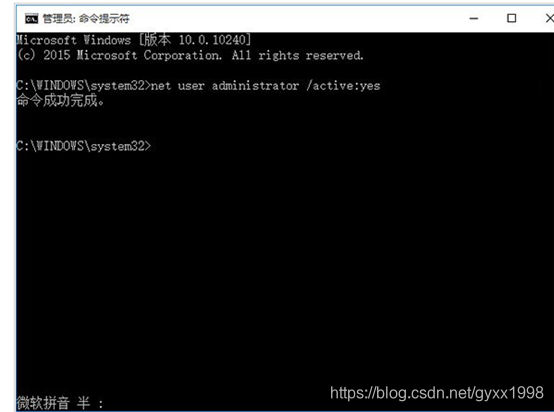
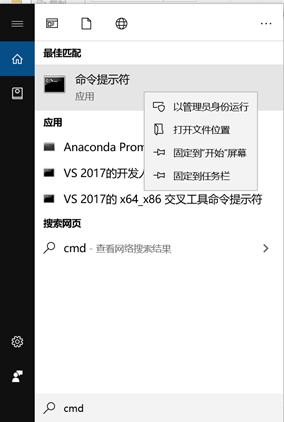
①在Cortana搜索栏输入CMD,并“以管理员身份运行”

②在命令提示符中输入如下命令后回车:
net user administrator /active:yes
在当前用户开始处-点击右键(Windows键+X)-关机或注销-注销。(注意,开始菜单中的电源是无法进行注销操作的)
进入Administrator模式。
登录后,点击任务栏上的“文件资源管理器”。
进入C盘,即系统盘,用户文件夹所在位置。
可看到中文用户的文件夹名,可以打开进入检查是不是使用的用户的资料。
选中后,按F2,或右键-重命名。
将中文名改为英文名。
3、Administrator模式下修改注册表
Windows键+R打开运行,输入regedit,点击确定打开Windows注册表管理器。
依次展开HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows NT\CurrentVersion\Profilelist,在Profilelist下的文件夹对应系统中用户,而其中某个文件夹(一般是最后一个或倒数第二个)中ProfileImagePath值是指向每个用户文件夹的地址,一个个点击查看,找到中文名用户的对应所在的ProfileImagePath值。
修改ProfileImagePath的值,将地址改为修改成英文的文件夹名。与C盘的文件夹名一致。再次注销,完成登录用户文件夹名更改。
遗留问题
修改完用户名后,可能会出现删除文件需要管理员权限,但赋予权限后依然无法删除的问题,baidu上有很多方法,如“右键-属性-安全-修改组和用户”、“建立reg修改注册表,右键赋予管理员权限删除的方法”……但这些都是不知道是因为管理员名字变更,还是因为我是win10家庭版的原因,这些方法对我的电脑都没有用,换到administrator下也是无法删除
后来看到一个很简单的方法,以管理员身份运行cmd(划重点,一定要是管理员身份)
然后使用rd/s/q “文件夹路径”,然后回车
比如文件夹路径为 E:\baidu player
则输入
C:\Users\XX>rd/s/q “E:\baidu player”
回车,这样可以删除整个文件夹
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)