0. 环境依赖
- 研扬RC-S-ARES-200AI-NX-CSC00型号
- Jetpack4.6.0

1. 如何进入Recovery模式
1. 先按住Recovery键再插电源上电,此间一直按住Recovery键2-3秒之后松开
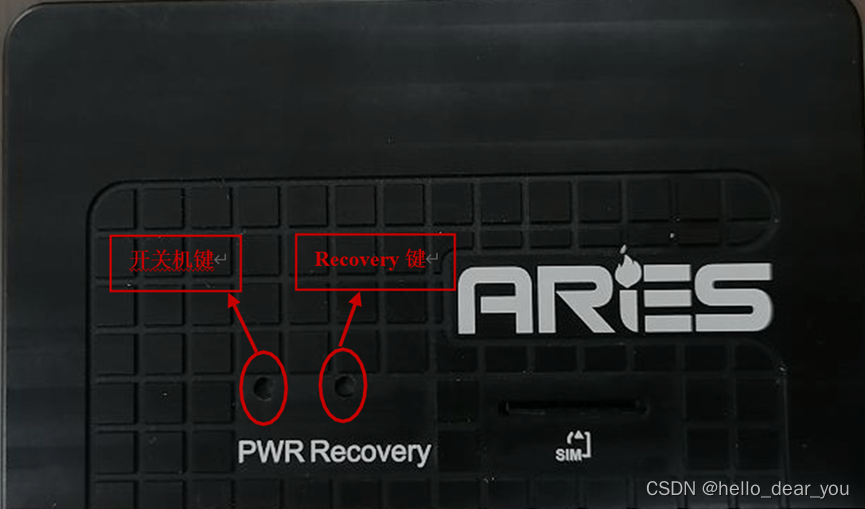
2. 将USB OTG连接到主机(Ubuntu18.04)

3. 使用lsusb查看,在输出列表中找到7e19的Nvidia设备,则表示机器已进入Recovery模式,并且连接主机成功

2. 系统备份
2.1 BSP文件下载
链接:https://pan.baidu.com/s/1Za3p45dAuylWh1dFCHV-Yw
提取码:oqq0
2.2 具体操作步骤

- 解压JetPack_4.6_Linux_JETSON_XAVIER_NX_TARGETS.tar.gz文件

- 将待备份系统的NX设备进入Recovery模式,并用OTC-USB线连接Linux主机,具体操作查看第1节,用lsusb查看设备是否连接成功。
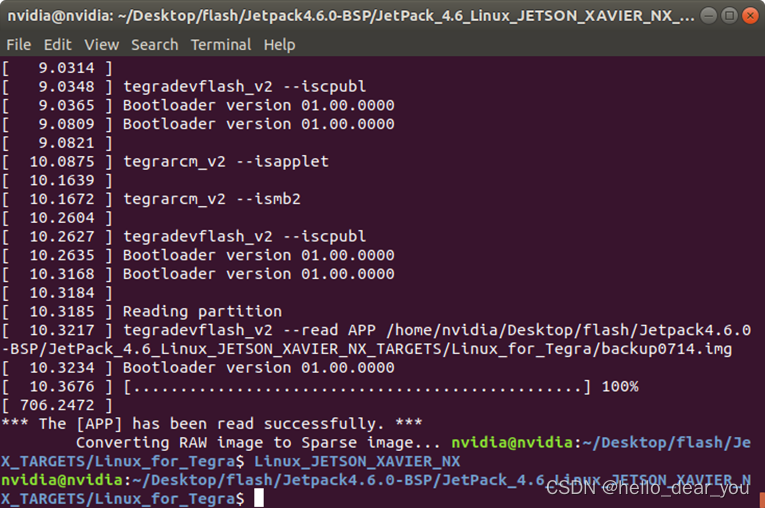
- 进入Linux_for_Tegra目录,运行如下命令进行系统备份
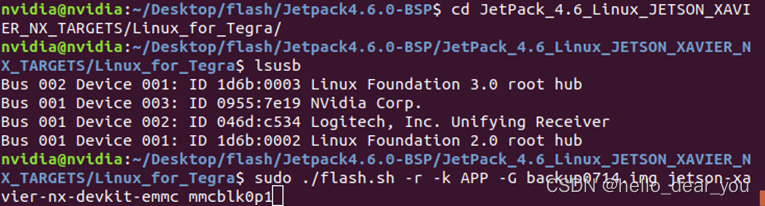
sudo ./flash.sh -r -k APP -G system.img jetson-xavier-nx-devkit-emmc mmcblk0p1
- 通过运行上述命令会在Linux_for_Tegra目录下生成system.img文件(备份得到的镜像文件),具体过程参考如下图。

3. 系统恢复
- 将待恢复系统的NX设备进入Recovery模式,并用OTC-USB线连接Linux主机,具体操作查看第1节,用lsusb查看设备是否连接成功。
- 将在Linux_for_Tegra目录下生成的system.img拷贝到bootloader目录下

- 在Linux_for_Tegra目录下运行如下命令,将system.img系统镜像安装到新的NX设备上
sudo ./flash.sh -r -k APP jetson-xavier-nx-devkit-emmc mmcblk0p1
- 刷机完成之后,拔掉OTG和电源线,重新开机就可以了。
4.系统刷机
4.1 下载Jetpack4.6.0的系统包
链接:https://pan.baidu.com/s/17g79Ok9FNcl2FtTIo4awQA
提取码:ie9t
4.2安装依赖包
sudo apt-get install device-tree-compiler
4.3 刷机
- 将NX设备进入Recovery模式,并用OTC-USB线连接Linux主机,具体操作查看第1节,用lsusb查看设备是否连接成功。
- 将下载好的 bootloader.tar.gz 解压
sudo tar -vxf bootloader.tar.gz
sudo ./flashall.sh
- 完成之后断掉电源和USB线,然后重连电源线进入系统。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)