ros教程:rviz使用教程
文章目录
- 前言
- 一、RVIZ介绍
-
- 二、发送基础形状至RVIZ(C++)
- 1.创建程序包
- 2.创建节点
- 3.编辑代码如下(示例):
- 4.编辑CMakeLists.txt文件
- 5. 编译源码
- 6.运行节点
- 7.启动RVIZ
- 总结(最重要的)
前言
根据前面的教程已经学会了创建功能包,那么本篇文章主要内容则是通过节点来发布数据至RVIZ
提示:以下是本篇文章正文内容,下面案例可供参考
一、RVIZ介绍
rviz是ros的一个可视化工具,用于可视化传感器的数据和状态信息。
rviz支持丰富的数据类型,通过加载不同的Dispalys类型来可视化,每一个Dispaly都有一个独特的名字。
1.数据类型介绍
常见的display类型
| 类型 | 描述 | 消息类型 |
|---|
| Axes | 显示坐标系 | – |
| Markers | 绘制各种基本形状(箭头、立方体、球体、圆柱体、线带、线列表、立方体列表、点、文本、mesh数据、三角形列表等) | visualization_msgs::Marker visualization_msgs::MarkerArray |
| Camera | 打开一个新窗口显示摄像头图像 | sensor_msgs/Image
sensor_msgs/CameraInfo |
| Grid | 显示网格 | – |
| Image | 打开一个新窗口显示图像信息 | sensor_msgs/Image |
| LaserScan | 将传感器信息中的数据显示为世界上的点、
绘制为点或立方体 | sensor_msgs/LaserScan |
| Image | 显示图像 | sensor_msgs/Image |
| PointCloud | 显示点云数据 | sensor_msgs/PointCloud |
| Odomerty | 显示里程计数据 | nav_msgs/Odometry |
| PointCloud2 | 显示点云数据 | sensor_msgs/PointCloud2 |
| RobotModel | 显示机器人模型 | – |
| TF | 显示TF树 | – |
2.界面介绍
RVIZ整体界面

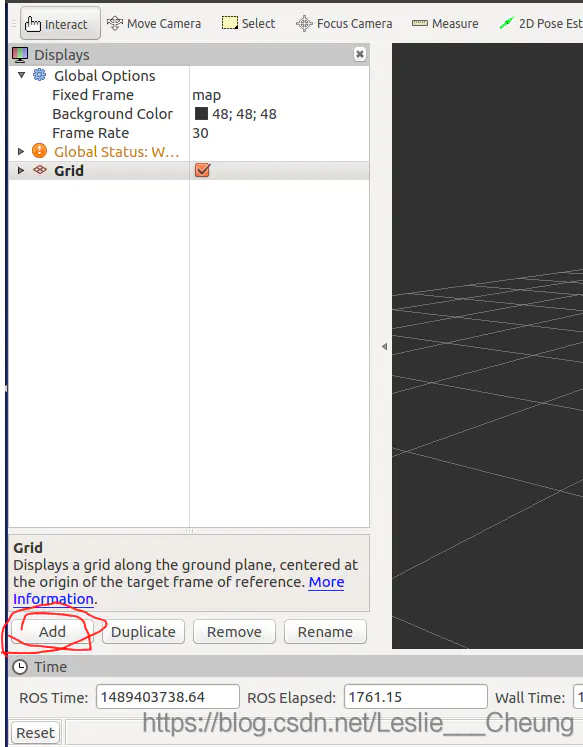
添加显示界面
点击add按钮:
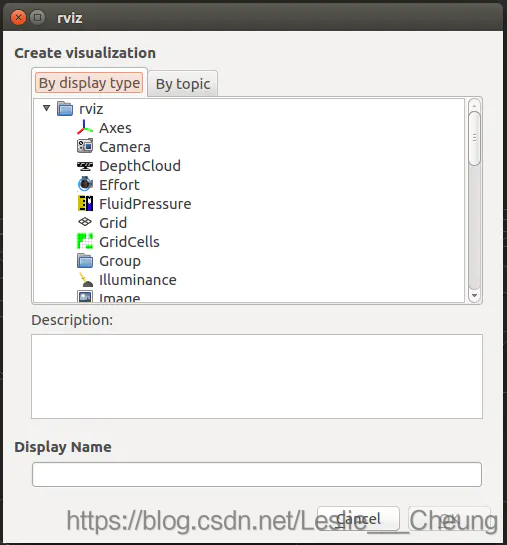
然后会弹出来一个对话框:
二、发送基础形状至RVIZ(C++)
1.创建程序包
catkin_create_pkg using_markers roscpp visualization_msgs
2.创建节点
touch basic_shapes.cpp
具体创建程序包及节点的教程可翻阅之前的文章
3.编辑代码如下(示例):
basic_shapes.cpp
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, "basic_shapes");
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1);
uint32_t shape = visualization_msgs::Marker::CUBE;
while (ros::ok())
{
visualization_msgs::Marker marker;
marker.header.frame_id = "/my_frame";
marker.header.stamp = ros::Time::now();
marker.ns = "basic_shapes";
marker.id = 0;
marker.type = shape;
marker.action = visualization_msgs::Marker::ADD;
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
marker.scale.x = 1.0;
marker.scale.y = 1.0;
marker.scale.z = 1.0;
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
marker.lifetime = ros::Duration();
while (marker_pub.getNumSubscribers() < 1)
{
if (!ros::ok())
{
return 0;
}
ROS_WARN_ONCE("Please create a subscriber to the marker");
sleep(1);
}
marker_pub.publish(marker);
r.sleep();
}
}
4.编辑CMakeLists.txt文件
编辑 using_markers package里面的CMakeLists.txt 文件,增加下面的内容在最后面:
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
5. 编译源码
catkin_make
6.运行节点
rosrun using_markers basic_shapes
这个时候会有一句黄色的Warning提醒你没有订阅者,这是我们程序里输出的提醒,不用担心。
7.启动RVIZ
运行命令启动rviz
rivz
如果是第一次启动的话,需要设置一下
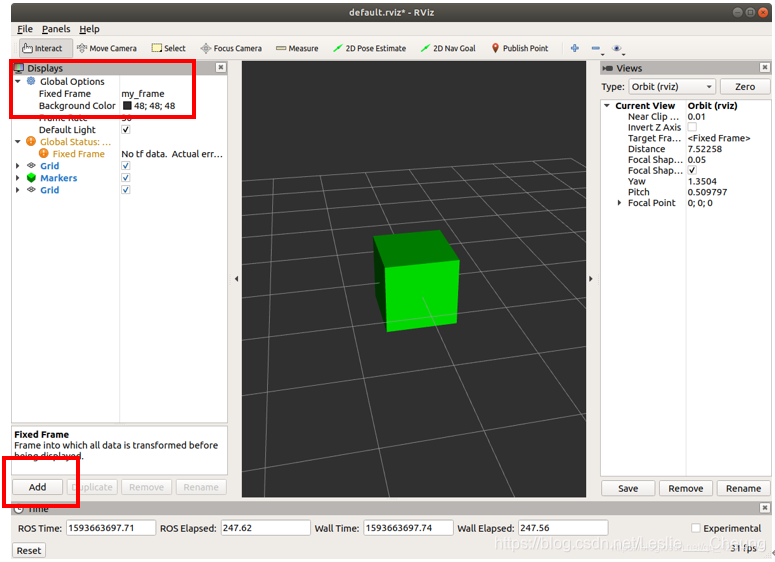
设置Fixed Frame为my_frame,然后点击Add添加一个Markers,这时候可以看到rviz显示区域出现了代码中设置的形状
总结(最重要的)
以上就是本篇博客的内容了,本文仅仅简单介绍了rviz的简单使用,具体的使用可以看ROS官网的教程。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)