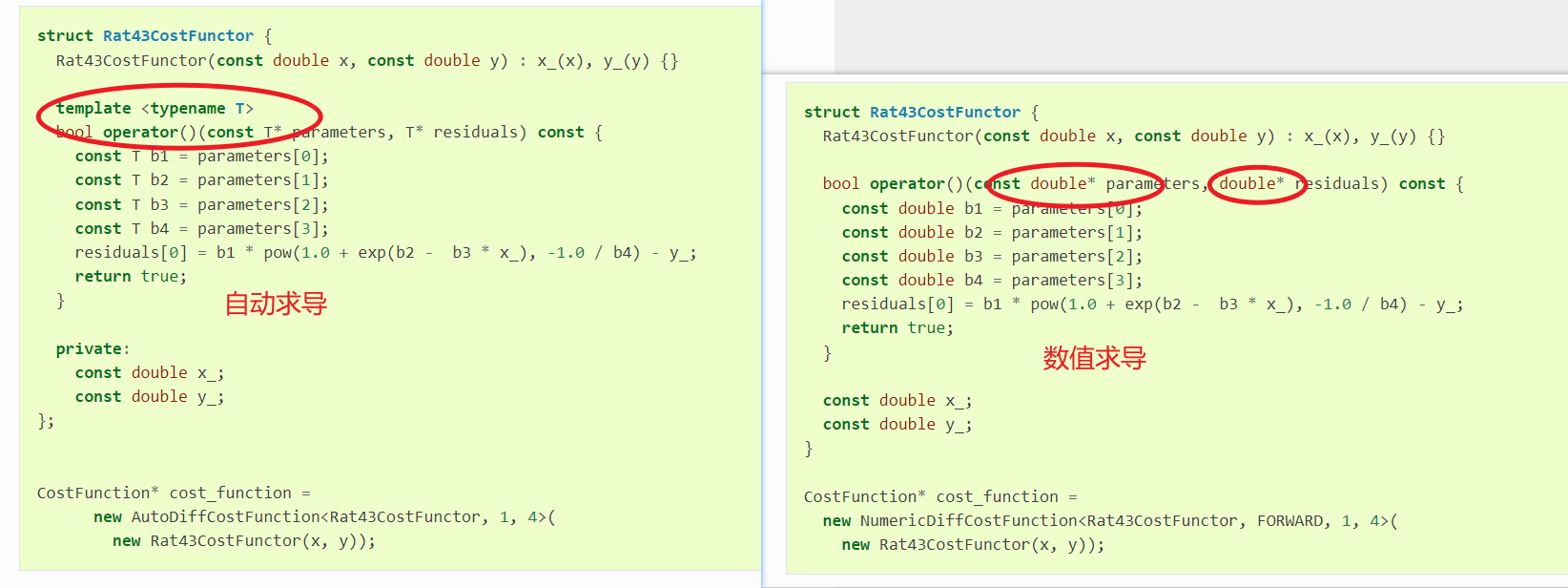
首先注意数值求导和自动求导在使用的时候的不同之处。
实际上,正是自动求导这个地方使用了类模板,导致它不仅可以传入参数,还可以传入Jet类型的数据,从而实现了参数的雅可比矩阵的计算,完成自动求导。下面会详细分析。
数学原理
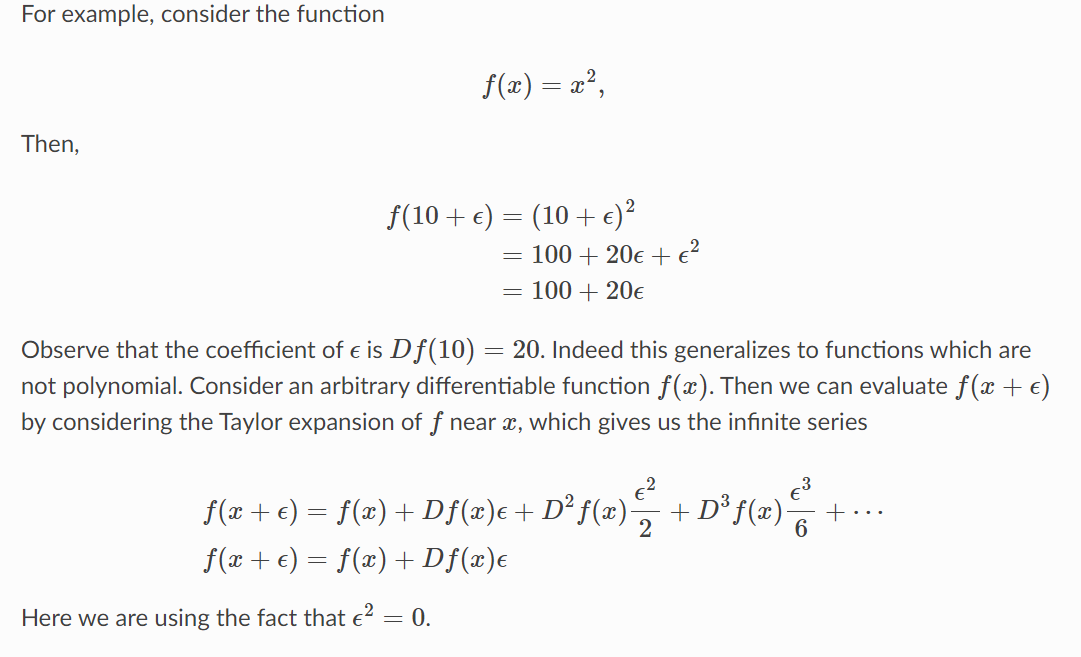
考虑我们需要求取一个函数在一个点的导数,我们直接给自变量添加一个无穷小量,然后对函数进行展开,之后就会发现无穷小量的系数就是函数关于变量在该点的导数。
实现原理
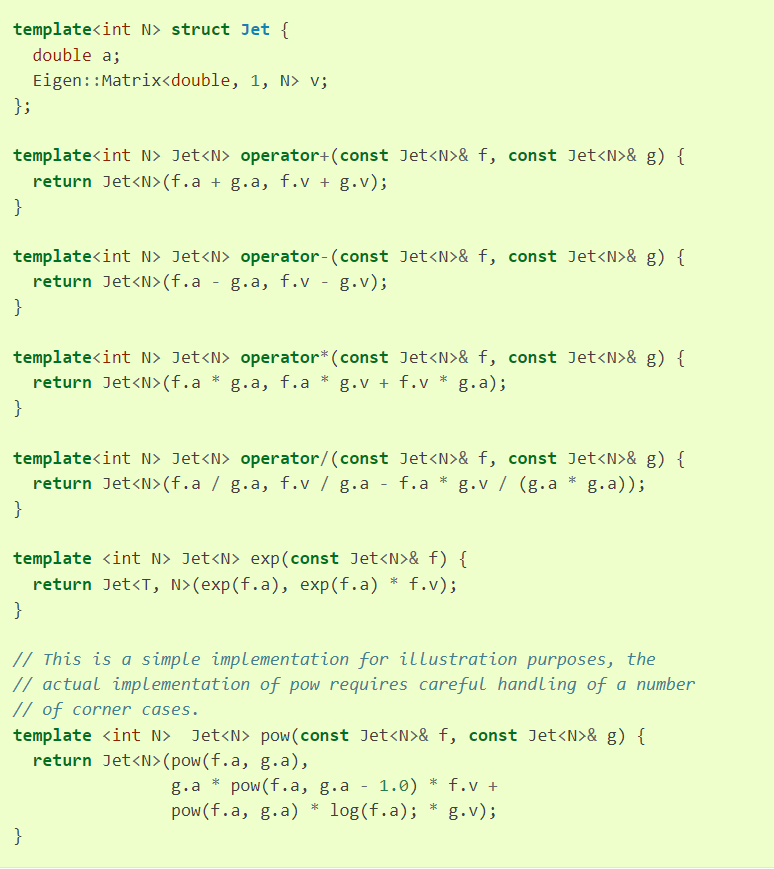
Ceres里面的自动求导通过设计了一个Jet数据结构(这个东西在数学原理上称为Dual Number),Jet数据结构包含两个部分,类似于复数一样,一部分是一个实数成员变量(即函数值),另一部分是一个固定大小的向量(即导数)。在求解器迭代过程中,Ceres Solver使用Jet类的对象来计算代价函数及其导数,并更新这些对象的值。
Ceres 实现的 Dual Number 的结构是 ceres::Jet,Jet 结构中的大量是 T a;,小量是 Eigen::Matrix v;(此处小量使用一个 Eigen::Vector 表达是基于多元函数对多个变量求导的考虑)。另外,因为Jet里面是包含了两个基本元素的,为了使得我们能够实现自动求导,我们需要对一些运算符进行重载,这里的一个基本思想就是“忽略高阶无穷小,仅保留一介无穷小”。下面是官网的一个实现方式:
有了上面这个Jet的基本定义之后,下面分析一下从观测量传入到实现自动求导这个过程。首先看我们在使用自动求导的时候是怎么调用AutoDiffCostFunction
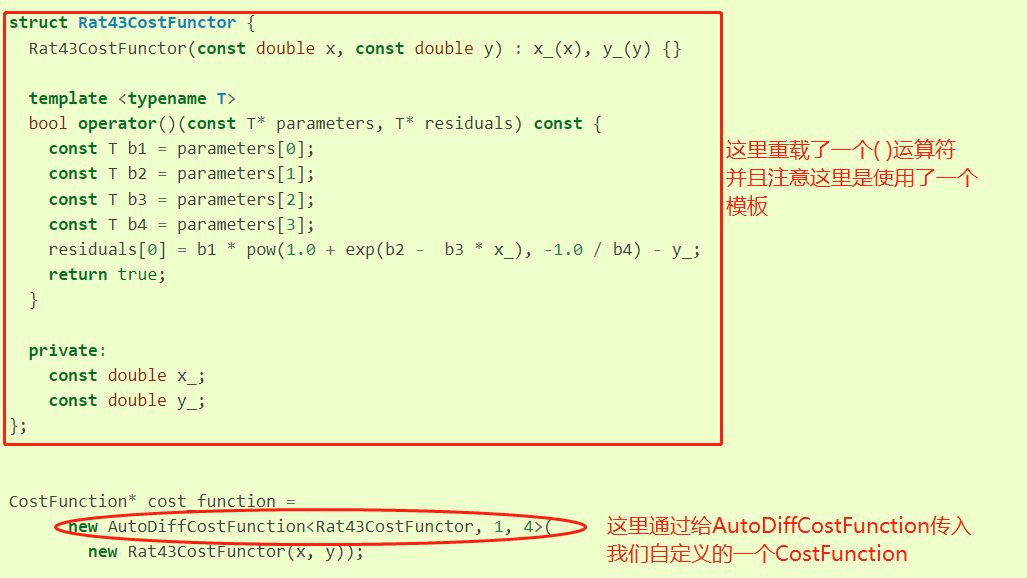
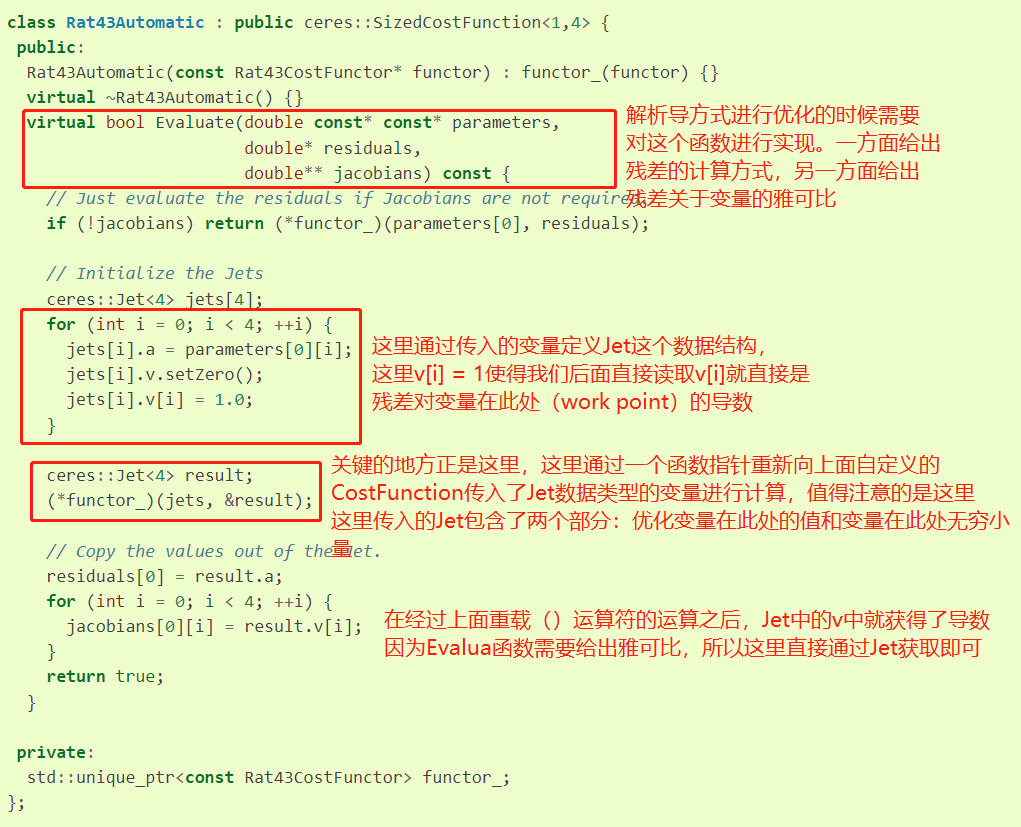
这里官网给了一个例子模拟了利用Jet实现对自定义CostFuntion导数计算的例子
总结
以上就是自动求导实现的原理。更本质和关键来说:实现这个自动求导的就是通过把残差的计算分解为Jet这种数据类型来进行计算!!!。经过一次残差计算就可以一方面获得残差Jet.a,另外一方面获得残差对变量在该work point的导数值Jet.v,接下来就是解析导的那一套。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)