问题:
在WSL中使用ROS时确实会有一些小bug,比如下面这个
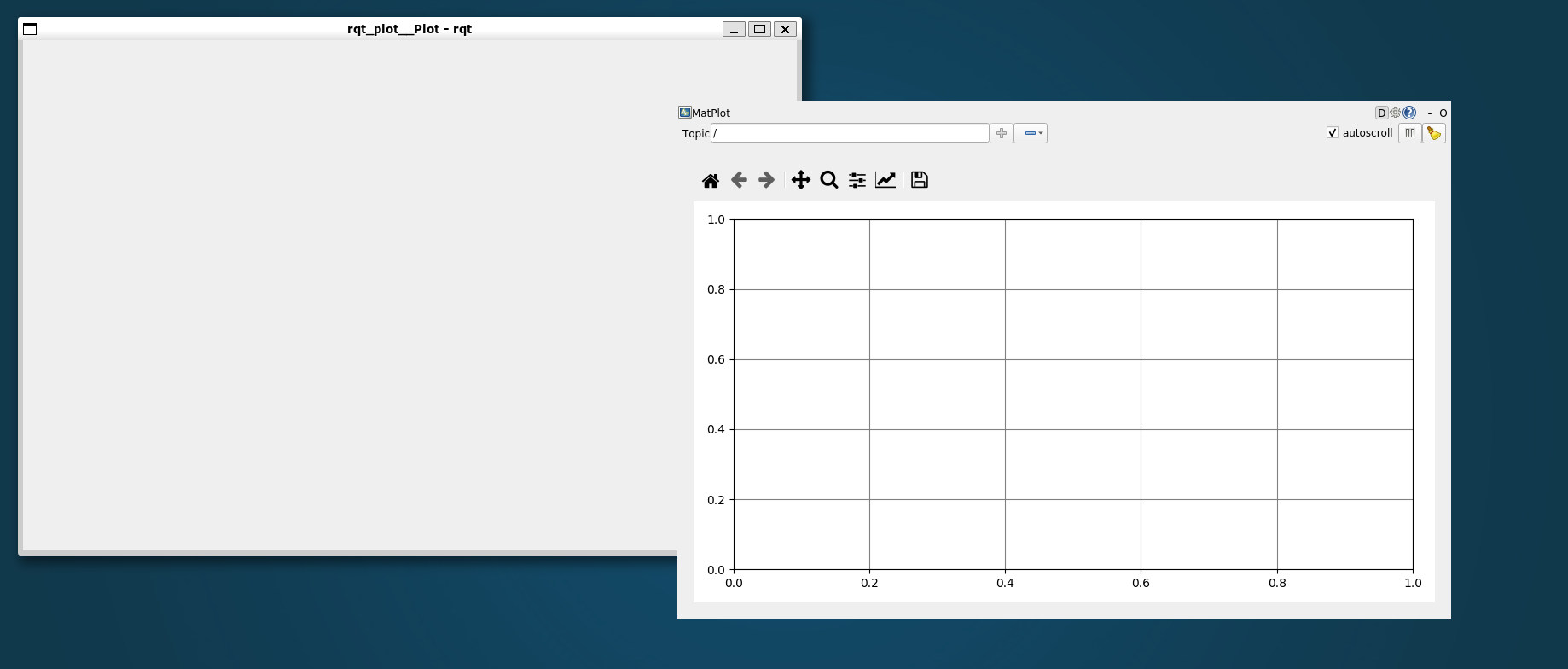
的rqt_plot功能包时,想通过rqt_plot指令查看相应信息,但是窗口弹出在窗口是空白的,并且rqt那个功能界面跑到了窗口外面,根本无法移动回去,指令运行时没有任何报错,且卸载rqt功能包、重启roscore、电脑均无法解决。如图:
解决办法:
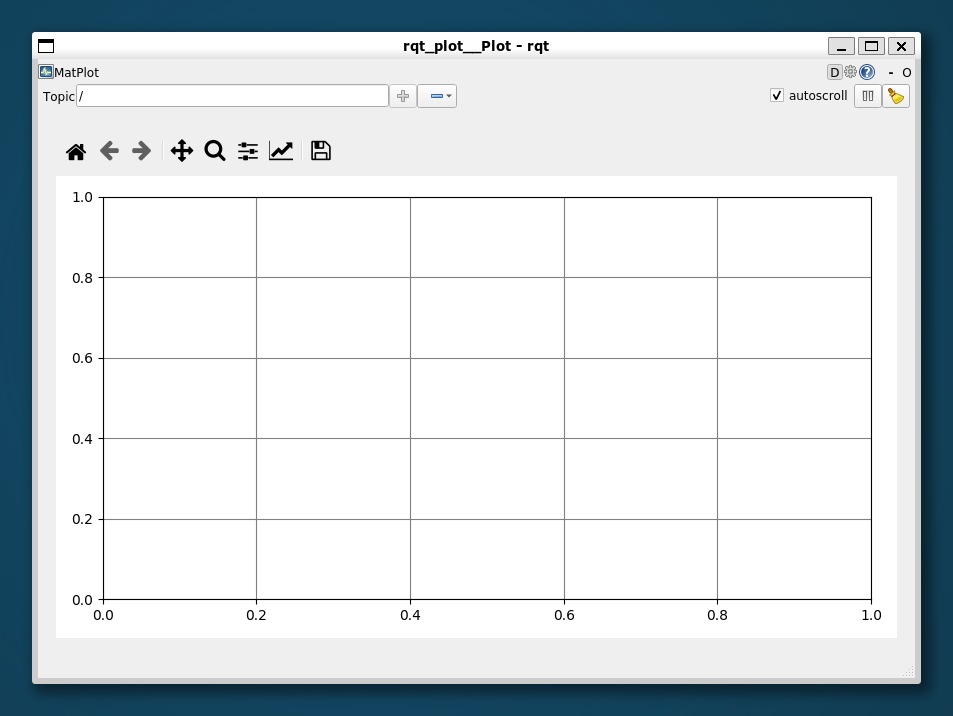
$ rqt_plot --clear-config
最后终于正常了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)