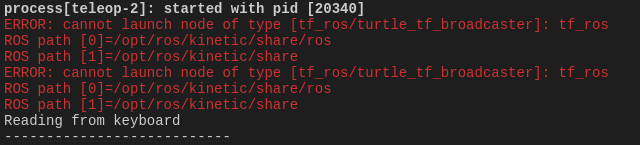
在运行launch文件时,出现如下错误提示:
原因是没有source。所以解决方案就是在编译完成之后添加source devel/setup.bash,问题解决。
参考网址:
ERROR: cannot launch node of type