socket网络字节序以及大端序小端序
不同CPU中,4字节整数1在内存空间的存储方式是不同的。4字节整数1可用2进制表示如下:
00000000 00000000 00000000 00000001
有些CPU以上面的顺序存储到内存,另外一些CPU则以倒序存储,如下所示:
00000001 00000000 00000000 00000000
若不考虑这些就收发数据会发生问题,因为保存顺序的不同意味着对接收数据的解析顺序也不同。
大端序和小端序
CPU向内存保存数据的方式有两种:
大端序(Big Endian):高位字节存放到低位地址(高位字节在前)。
小端序(Little Endian):高位字节存放到高位地址(低位字节在前)。
仅凭描述很难解释清楚,不妨来看一个实例。假设在 0x20 号开始的地址中保存4字节 int 型数据 0x12345678,大端序CPU保存方式如下图所示:

图1:整数 0x12345678 的大端序字节表示
对于大端序,最高位字节 0x12 存放到低位地址,最低位字节 0x78 存放到高位地址。小端序的保存方式如下图所示
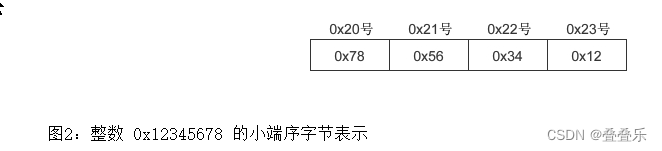
不同CPU保存和解析数据的方式不同(主流的Intel系列CPU为小端序),小端序系统和大端序系统通信时会发生数据解析错误。因此在发送数据前,要将数据转换为统一的格式——网络字节序(Network Byte Order)。网络字节序统一为大端序。
主机A先把数据转换成大端序再进行网络传输,主机B收到数据后先转换为自己的格式再解析。
网络字节序转换函数
在《使用bind()和connect()函数》一节中讲解了 sockaddr_in 结构体,其中就用到了网络字节序转换函数,如下所示:
//创建sockaddr_in结构体变量
struct sockaddr_in serv_addr;
memset(&serv_addr, 0, sizeof(serv_addr)); //每个字节都用0填充
serv_addr.sin_family = AF_INET; //使用IPv4地址
serv_addr.sin_addr.s_addr = inet_addr("127.0.0.1"); //具体的IP地址
serv_addr.sin_port = htons(1234); //端口号
htons() 用来将当前主机字节序转换为网络字节序,其中h代表主机(host)字节序,n代表网络(network)字节序,s代表short,htons 是 h、to、n、s 的组合,可以理解为”将short型数据从当前主机字节序转换为网络字节序“。
常见的网络字节转换函数有:
htons():host to network short,将short类型数据从主机字节序转换为网络字节序。
ntohs():network to host short,将short类型数据从网络字节序转换为主机字节序。
htonl():host to network long,将long类型数据从主机字节序转换为网络字节序。
ntohl():network to host long,将long类型数据从网络字节序转换为主机字节序。
通常,以s为后缀的函数中,s代表2个字节short,因此用于端口号转换;以l为后缀的函数中,l代表4个字节的long,因此用于IP地址转换。
举例说明上述函数的调用过程:
#include <stdio.h>
#include <stdlib.h>
#include <WinSock2.h>
#pragma comment(lib, "ws2_32.lib")
int main(){
unsigned short host_port = 0x1234, net_port;
unsigned long host_addr = 0x12345678, net_addr;
net_port = htons(host_port);
net_addr = htonl(host_addr);
printf("Host ordered port: %#x\n", host_port);
printf("Network ordered port: %#x\n", net_port);
printf("Host ordered address: %#lx\n", host_addr);
printf("Network ordered address: %#lx\n", net_addr);
system("pause");
return 0;
}
运行结果:
Host ordered port: 0x1234
Network ordered port: 0x3412
Host ordered address: 0x12345678
Network ordered address: 0x78563412
另外需要说明的是,sockaddr_in 中保存IP地址的成员为32位整数,而我们熟悉的是点分十进制表示法,例如 127.0.0.1,它是一个字符串,因此为了分配IP地址,需要将字符串转换为4字节整数。
inet_addr() 函数可以完成这种转换。inet_addr() 除了将字符串转换为32位整数,同时还进行网络字节序转换。请看下面的代码:
#include <stdio.h>
#include <stdlib.h>
#include <WinSock2.h>
#pragma comment(lib, "ws2_32.lib")
int main(){
char *addr1 = "1.2.3.4";
char *addr2 = "1.2.3.256";
unsigned long conv_addr = inet_addr(addr1);
if(conv_addr == INADDR_NONE){
puts("Error occured!");
}else{
printf("Network ordered integer addr: %#lx\n", conv_addr);
}
conv_addr = inet_addr(addr2);
if(conv_addr == INADDR_NONE){
puts("Error occured!");
}else{
printf("Network ordered integer addr: %#lx\n", conv_addr);
}
system("pause");
return 0;
}
运行结果:
Network ordered integer addr: 0x4030201
Error occured!
从运行结果可以看出,inet_addr() 不仅可以把IP地址转换为32位整数,还可以检测无效IP地址。
注意:为 sockaddr_in 成员赋值时需要显式地将主机字节序转换为网络字节序,而通过 write()/send() 发送数据时TCP协议会自动转换为网络字节序,不需要再调用相应的函数。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)