-
搞了一个早上 不知道怎么弄这个东西 最后发现没有必要将ZonedDateTime写的很全 可以精简的封装 public static ZonedDateTime changeShanghaiToUTC String beijingDateT
-
费劲整理来的 上边是 小米平板1 MIPAD1的 ROM 下边是MI3W小米3联通版的ROM 欧版xiaomi eu系统的好处就是省电 miui MIPAD V9 2 4 0 KXFCNEK 97354839c6 4 4 zip 这个是小米
-
报错 com mongodb MongoSocketReadTimeoutException Timeout while receiving message at com mongodb connection InternalStreamC
-
C list容器 list容器的基本概念 1 list的构造函数 2 list的赋值和交换 3 list的大小操作 4 list的插入和删除 5 list的数据存取 6 list的反转与排序 7 list的排序案例 list容器的基本概念
-
当学习成为了习惯 知识也就变成了常识 感谢各位的 关注 点赞 收藏和评论 新视频和文章会第一时间在微信公众号发送 欢迎关注 李永宁lyn 文章已收录到 github 仓库 liyongning blog 欢迎 Watch 和 Star 前言
-
可能磁盘写保护 第一步 df h 确定文件夹对应的磁盘 第二步 mount ro为只读 rw为可读可写 可以用mount命令看看ro的分区 如果发现有ro 就重新mount 如 umount dev sda1 mount dev sda1
-
在过去不久的金九银十 有些小伙伴已经找到了理想的工作 当然也有很多小伙伴因为准备不充分 面试挂了 临近年关 最近有很多网友都在求大厂面试题 正好我在9月份和10月份整理和收集了 Android 中高级面试真题解析 于是就发上来分享给大家 这
-
如何使用matlab读取excel中的表格数据 设备系统 win10 操作软件 matlab2020b 1 首先打开matlab软件 点击 新建 脚本 2 在脚本中输入代码 A xlsread C Users Administrator D
-
项目运行 环境配置 Jdk1 8 Tomcat7 0 Mysql HBuilderX Webstorm也行 Eclispe IntelliJ IDEA Eclispe MyEclispe Sts都支持 项目技术 SSM mybatis Ma
-
实际内存为什么是2GB 512MB 因为实际容量是取CPU寻址 2 32B 与内存与外存之和 2GB 512MB 的最小值 就是相当于 数学里面两个值取最小值一样
-
引言 GDB调试主要有两种方法 1 直接在目标板上通过gdb调试程序 2 在目标板上通过gdbserver运行程序 在宿主机上通过gdb调试程序 本篇文章主要来说明一下gdbserver远程调试的方法 主要以VScode举例说明 步骤 一
-
目录 1 idea下载Scala 2 点击 Restart IDE 重启IDEA即可 3 创建scala目录 4 Mark scala目录为 source root 5 在windows的电脑安装scala jdk并且配置 环境变量 6 在
-
链接 https pan baidu com s 1XCuLTlKRN7gVxJdQkcKnUw 密码 iaws
-
读者 写者问题 读进程优先算法 写者优先算法 问题描述 有读者和写者两组并发进程 共享一个文件 当两个或两个以上的读进程同时访问共享数据时不会产生副作用 但若某个写进程和其他进程 读进程或写进程 同时访问共享数据时则可能导致数据不一致的错误
-
目录 起因 概览 设计及解决思路 1 滚动条竖起来 2 绑定菜单 3 吸附 优化 组件全部代码 起因 在elementplus中看到了滚动条绑定了slider 但是这个感觉很不实用 在底部 而且横向滚动 最常见的应该是那种固定在左上角的带着
-
交叉编译GDB 交叉编译GDB 1 下载GDB源码 2 解压并创建安装目录 3 编译安装 4 可能遇到的错误解决方法 1 下载termcap 2 将上面的编译安装gdb的脚本改一下 3 对于最后的权限不够无法删除PC机上termcap h文
-
UE4系列文章目录 文章目录 UE4系列文章目录 前言 一 步骤 1 打开UE4软件 2 新建工程 3 选择游戏类型模板 4 项目设置 运行游戏 前言 使用UE4 UnrealEngine 创建工程 我这里的ue4版本是4 27 2 一 步
-
stm32循迹小车详细制作过程 一 材料准备 1 主控板 Stm32f103c8t6 推荐 便宜够用 2 下载器 USB转TTL串口模块 3 电源 12v锂电池组 配套充电器 推荐下图这种 方便 好接线 12v 12v 12v 4 电机驱动
-
运行程序报错 无法直接pip install dateutil 需要pip install python dateutil
-
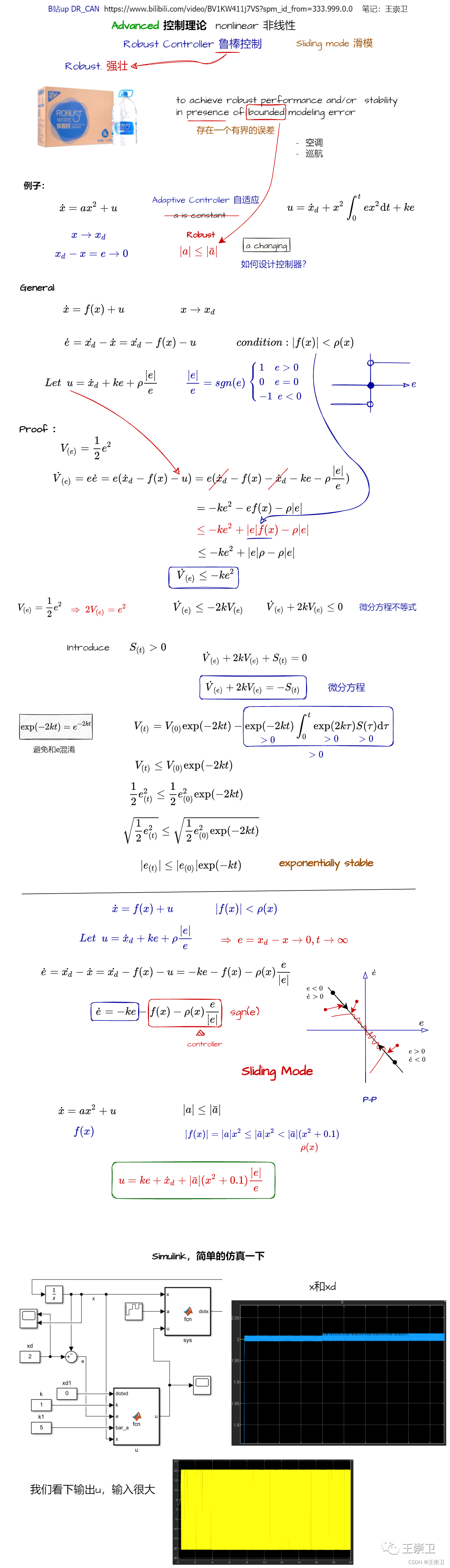
非线性控制理论 1 Lyapunov直接方法 非线性控制理论 2 不变性原理 非线性控制理论 3 基础反馈稳定控制器设计 非线性控制理论 4 反馈线性化 反步法 非线性控制理论 5 自适应控制器 Adaptive controller 非线