问题Diary
目录
问题Diary
ROS建模期
2021-2-7
1 ROS:No module named rospkg
2 :ImportError: dynamic module does not define module export function (PyInit__tf2)
ROS 迷茫期
2021-2-22
1.安装cartographer,找不到 "absl" 解决方法
2.单独下载2D slam demo之后,roslaunch出错
ROS 激光slam尝试期
2021-3-31
1.catkin_ws编译问题/ rosrun rviz rviz 报错
2021-4-3
1.下载gmapping,slam源码的时候会遇到问题
ROS建模期
2021-2-7
1 ROS:No module named rospkg
python2 与python3切换
2 :ImportError: dynamic module does not define module export function (PyInit__tf2)
问题是:python2 与python3切换
google找到了解决办法:
Errors like this are caused by python version problem. Your tf package can only be used by python2, so just change the first line of your spawn_model script:
from
/usr/bin/env python
to
/usr/bin/env python2.7.
修改了:/home/sunyang/ros_learner/catkin_ws/src......arbotix_driver from #! /usr/bin/env python to #! /usr/bin/env python2.7
但是问题仍然存在:

原因是robot描述文件URDF中关节定义出错,找到launch文件使用的URDF描述文件,并将left_wheel_joint修改成base_l_wheel_joint,将right_wheel_joint修改为base_r_wheel_joint。


又遇到:
ERROR: cannot launch node of type [mrobot_teleop/mrobot_teleop.py]: can't locate node [mrobot_teleop.py] in package [mrobot_teleop]
错误:无法启动类型为[mrobot_teleop / mrobot_teleop.py]的节点:无法找到程序包[mrobot_teleop]中的节点[mrobot_teleop.py]
解决办法:把自己写的节点设置为可执行文件权限
cd 节点根目录名(进入到你存放节点代码的目录下)
chmod 777 节点代码 (把权限设置为777)
eg:(以《ROS机器人开发实践》 胡春旭著 的代码为例)
转到→ mrobot_teleop
chmod 777 mrobot_teleop.py
终于成了

ROS 迷茫期
2021-2-22
1.安装cartographer,找不到 "absl" 解决方法

解决方法
$ sudo apt-get install stow
$ sudo chmod +x ~/catkin_google_ws/src/cartographer/scripts/install_abseil.sh
$ cd ~/catkin_google_ws/src/cartographer/scripts
$ ./install_abseil.sh
2.单独下载2D slam demo之后,roslaunch出错

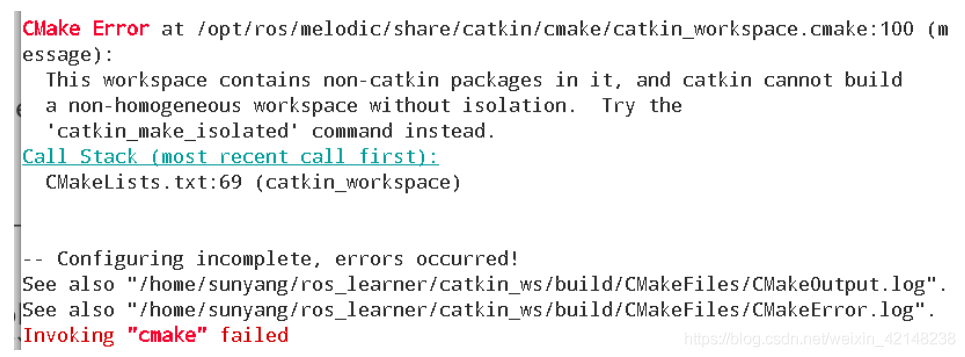
这种错误的主要原因是ros的catkin_ws配置问题,setup.bash文件没有进一步说明包的来源,解决方法是:
source ~/ros_learner/catkin_ws/devel/setup.bash //ros_learner是自己建立的文件夹,根据自己的目录来。
在环境目录下,记得重新编译,catkin_make不行就根据提示更换指令。
catkin_make_isolated
安装ceres solver 编译出错
之前安装的是ceres 1.11.0
error: ‘<anonymous>.ceres::internal::SchurEliminator<-1, -1, -1>::Chunk::start’ may be used uninitialized in this function [-Werror=maybe-uninitialized] struct Chunk { ^~~~~
后来改成ceres-solver-1.13.0版本,就可以make通过了
但是之后运行launch依然存在错误

ROS 激光slam尝试期
2021-3-31
1.catkin_ws编译问题/ rosrun rviz rviz 报错

解决办法:

换言之,就是把TF2 package 重装
将rviz 重装
sudo apt-get purge ros-melodic-rviz
sudo apt-get install ros-melodic-rviz
但是 rosrun rviz rviz 依旧打不开
找到解决方法

解决方案——ROS重装,即可打开rviz
2021-4-3
1.下载gmapping,slam源码的时候会遇到问题
就是昨天的问题,其实是下载geometry2的时候,不可以从github上下载,只能使用git命令,在终端进行下载。就不会对tf look up error 报错。。。
傻乎乎的重装了ROS。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)