文章目录
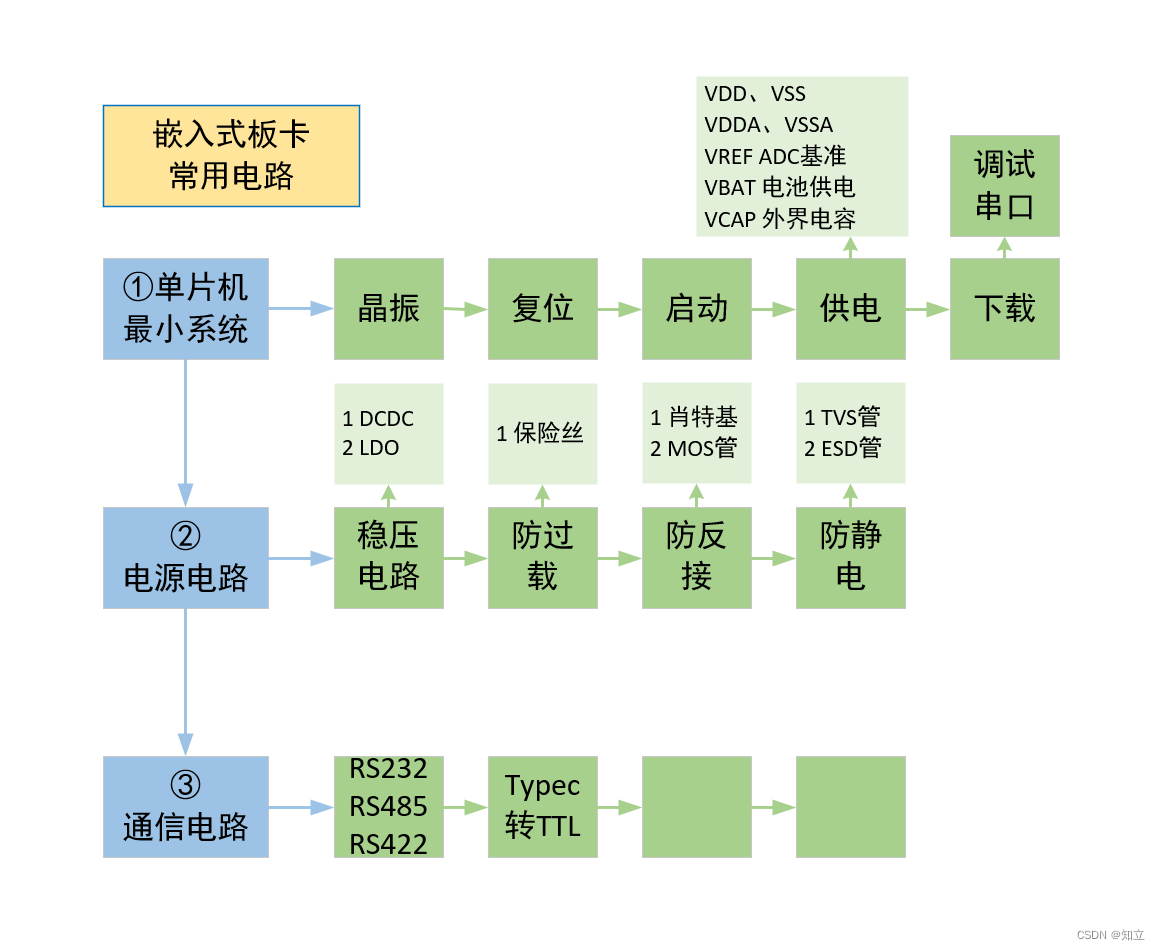
- 嵌入式板卡电路 框图
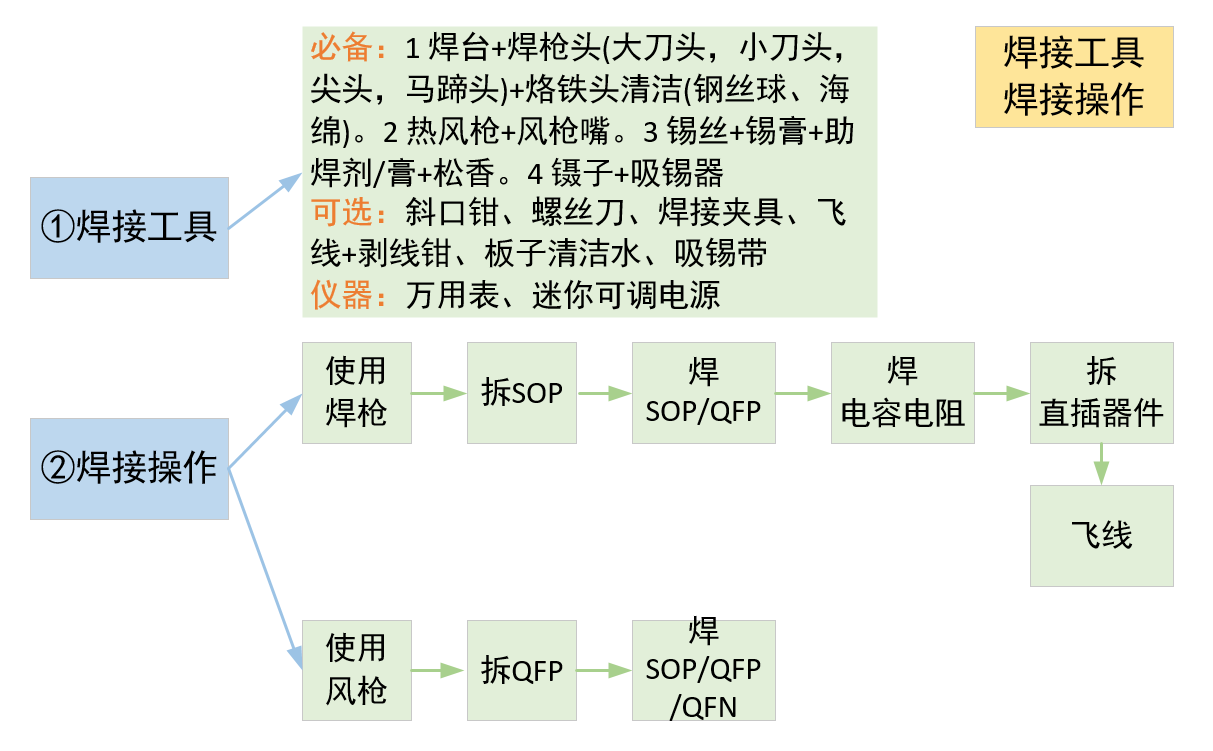
- 常用焊接工具和焊接操作 框图
- 一、元器件
- //——有极性——//
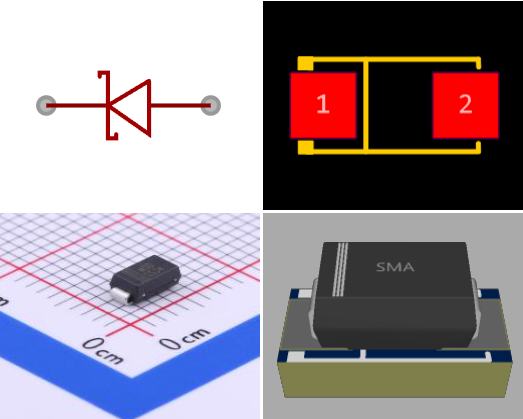
- 1 肖特基二极管
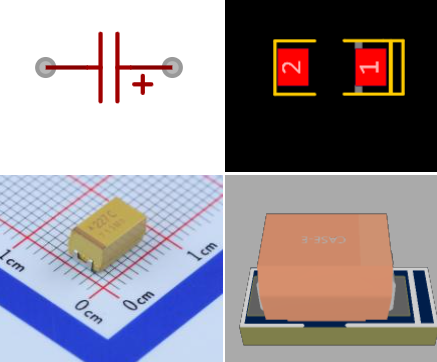
- 2 钽电容
- 3 三极管
- 4 MOS
- 5 LED
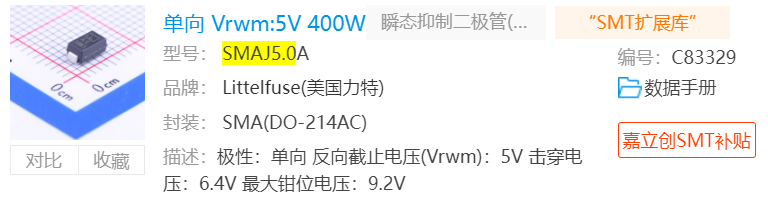
- 6 SMAJ5.0CA(TVS管)
- 8 SRV05-4(ESD管)
- 7 电解电容
- //——无极性——//
- 1 电容
- 2 电阻
- 3 电感
- 4 保险丝
- //——接插件——//
- 1 typec母座
- 2 网口PHY
- 3 SP3490(MaxLinear)
- 4 MAX3490(MAXIM美信)
- 5 CH340x
- 二、应用电路
- 1 DCDC电源
- 1 原理
- 2 物料选型
- 3 电路设计
- 4 布局布线:
- 5 模块测试:
- 1 LDO
- 2 防反接
- 3 RS232/RS485/RS422
- 4 上/下拉电阻
- 5 typec转TTL(ch340N)
嵌入式板卡电路 框图
常用焊接工具和焊接操作 框图
本篇是知识篇。
AD画板篇:AD使用教程 图文并茂 AD2020四层板
一、元器件
//——有极性——//
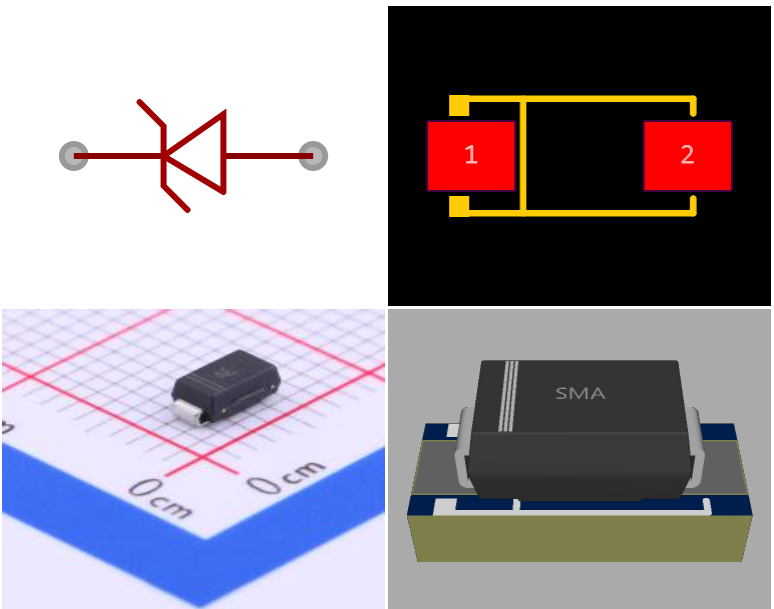
1 肖特基二极管
-
SS34。有竖线为负。
2 钽电容
-
有线为正。(特殊的存在)
3 三极管
4 MOS
5 LED
6 SMAJ5.0CA(TVS管)
1 原理:
- SMAJ5.0CA是一种TVS二极管。TVS二极管(Transient Voltage Suppressors),即瞬态抑制二极管,具有浪涌吸收能力。当电路突然受到瞬间高能量冲击时候,他可以吸收来自电路的瞬间大电流,不让电压突升,目的是保护后面的设备或者电路。
2 使用:
3 选购:
- 极性:有竖线的为负。TVS二极管有单向和双向之分,单向多用于直流电路,双向多用于交流电路。
- 反向截止电压:电路正常工作电压
- 击穿电压:
- 最大钳位电压:最大保持电压
- 瞬态功率:最大功率
4 四图:
- 极性:有竖线的为负。(二极管都这样?)
- 原理图、封装图、3D图、实物图
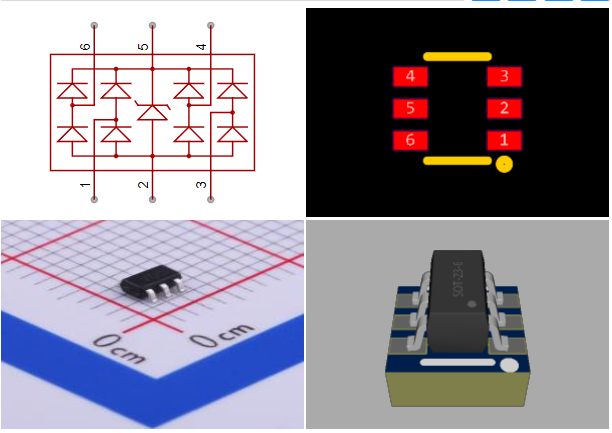
8 SRV05-4(ESD管)
TVS和ESD:
- 两种都是保护管
- TVS二极管用于:电源端口过电压防浪涌防护
- ESD静电保护器用于:通信端口防静电放电防护
使用:
- ESD二极管的正负接在电源引脚,公共端接在被保护引脚上起到释放静电的作用
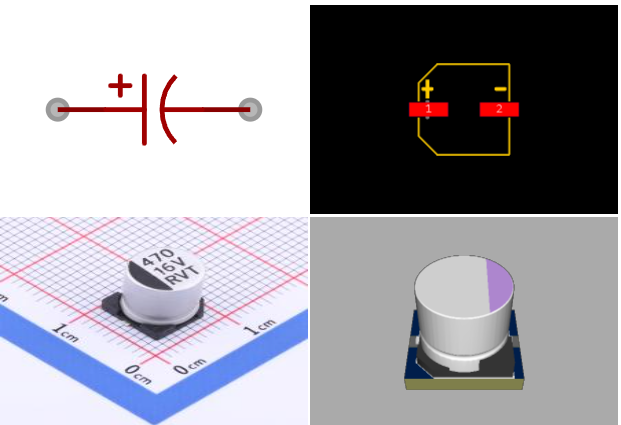
7 电解电容
//——无极性——//
1 电容
2 电阻
3 电感
4 保险丝
1 原理:
- 保险丝又称电流保险丝,主要起过载保护作用。当电路中电流升高到一定限度,他就会熔断。(保险丝和熔断器作用一样,保险丝用于弱点,熔断器用于强电)
2 使用:
- 1 串在电源输入端,对后面电路起短路保护作用。
- 2 串在板子的电源输出端,保护输出电路?
3 选购
- 保持电流:最大工作电流。确保比设定的输入电流高,×1.5?
- 跳闸电流:启动保护的最小电流。
- 最大电压、最大电流:能承受的最大值,超了器件损坏。
//——接插件——//
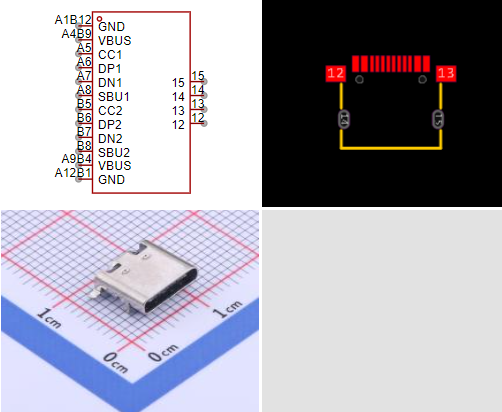
1 typec母座
差分走线
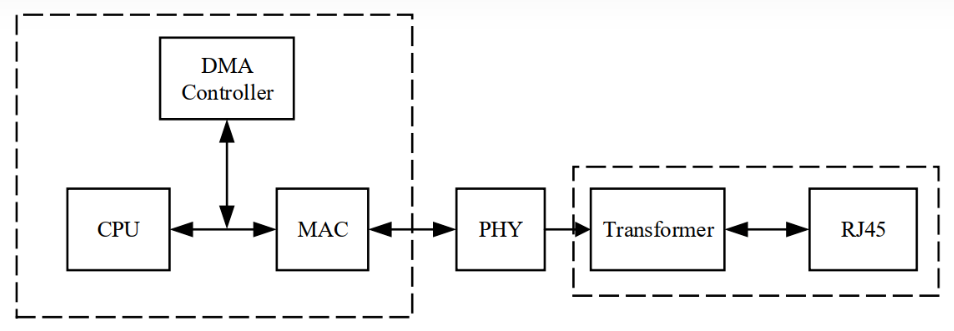
2 网口PHY
以太网系统包括以下部分:
- MAC控制器:数据链路层
- PHY芯片:物理层
- 网络变压器:变换电平
- RJ45接头:接口
一般CPU和MAC集成在一起,网络变压器和RJ45接头集成在一起。
网口RX TX 差分走线。
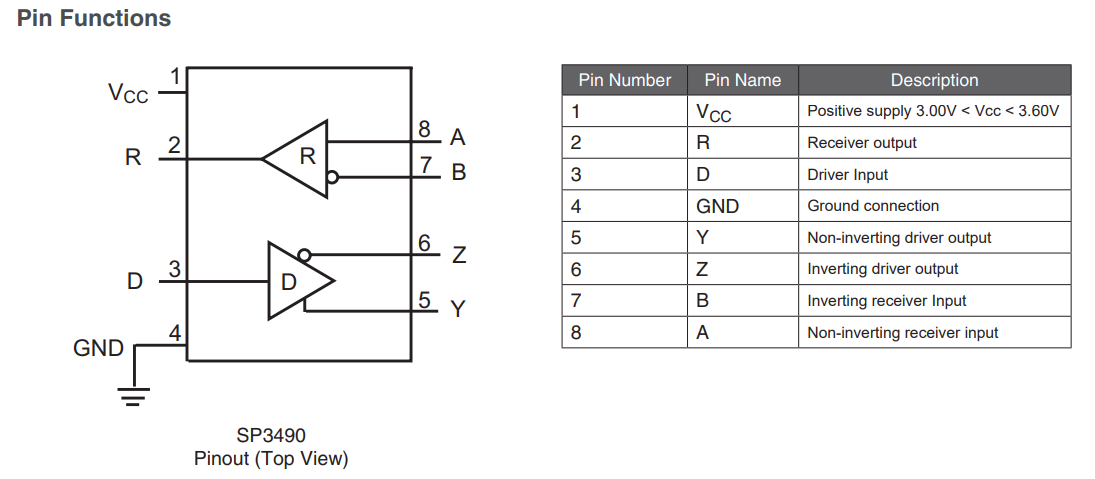
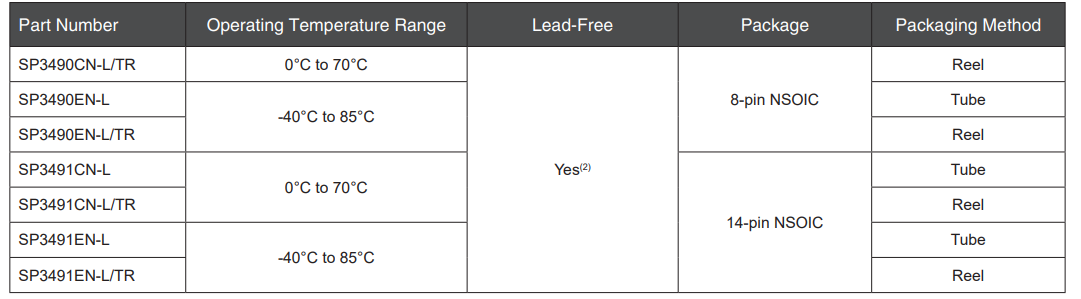
3 SP3490(MaxLinear)
4 MAX3490(MAXIM美信)
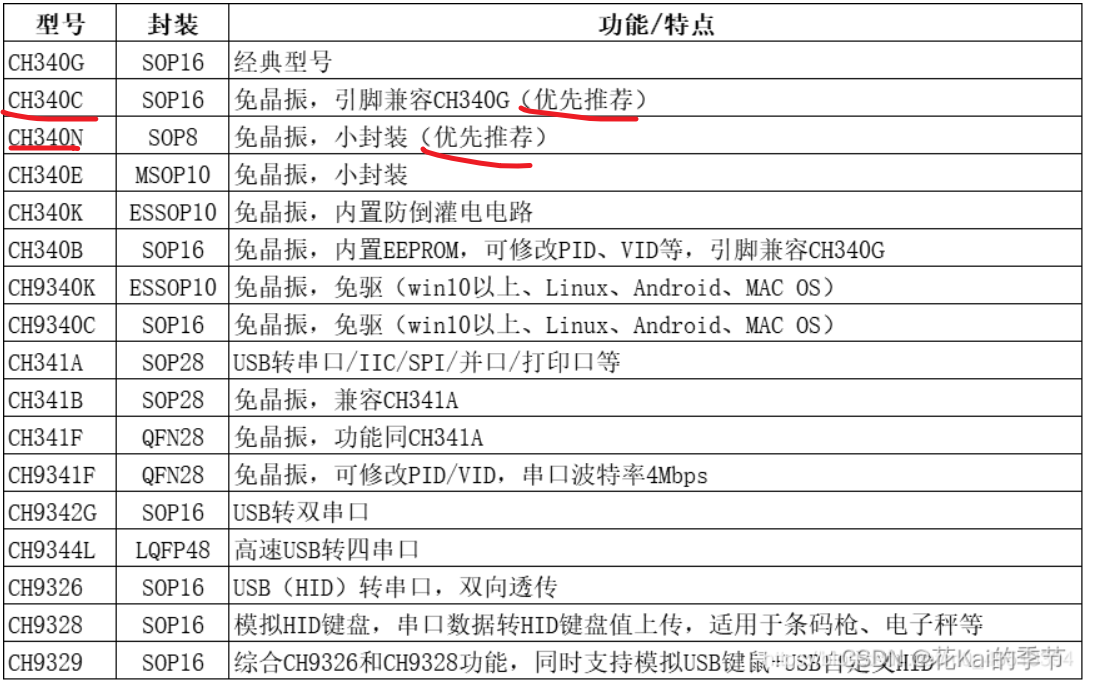
5 CH340x
二、应用电路
1 DCDC电源
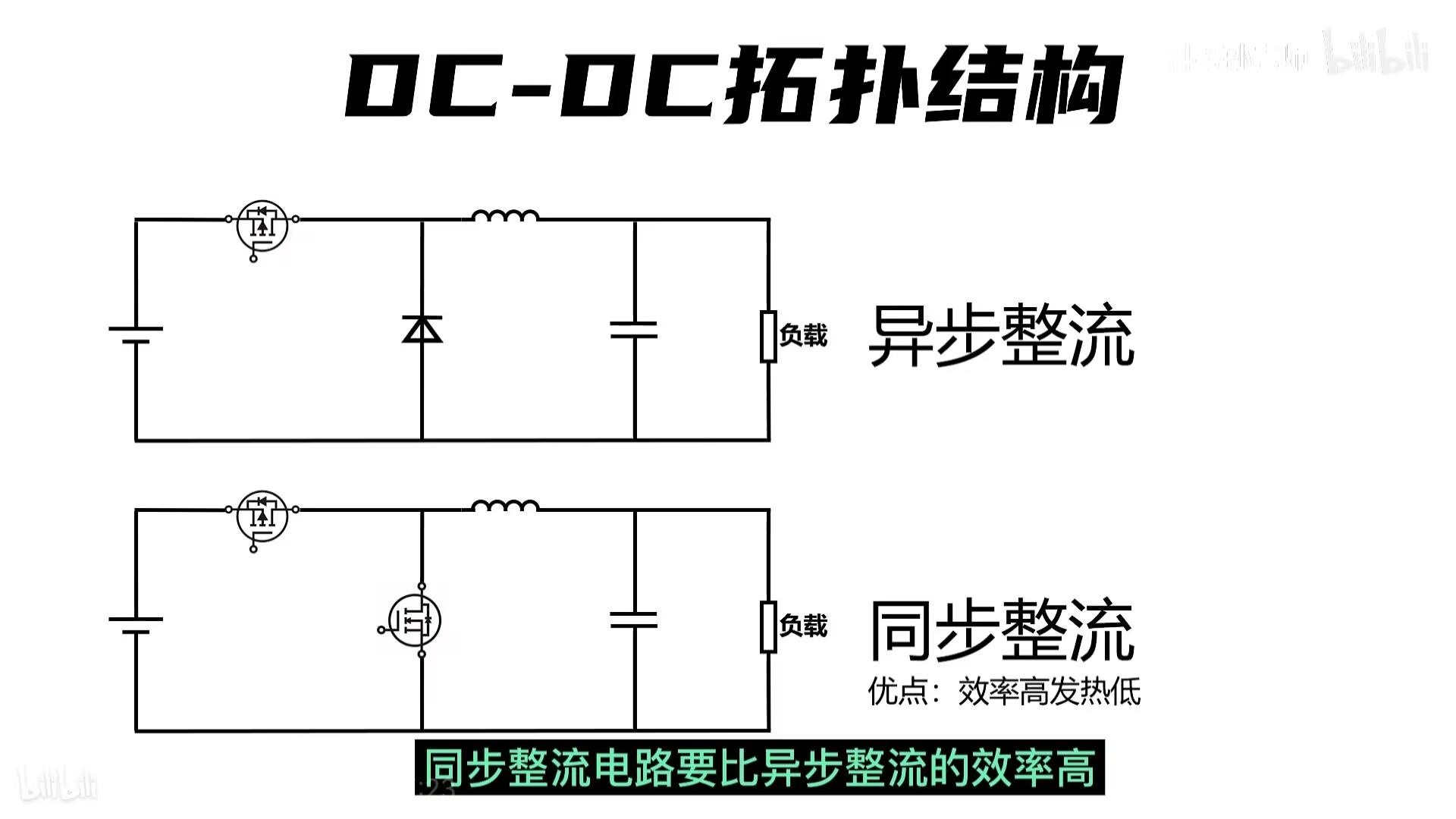
- DCDC是指直流-直流电源,而Buck和Boost是DCDC电源中常用的两种拓扑结构。(在电力电子领域,拓扑结构通常指的是电路的结构和组成方式)
- Buck转换器,也称为降压转换器(step-down converter)
- Boost转换器,也称为升压转换器(step-up converter)
1 原理
- 通过mos管不停的通断,类似PWM,加上电容电感的滤波电路,最终实现降压。
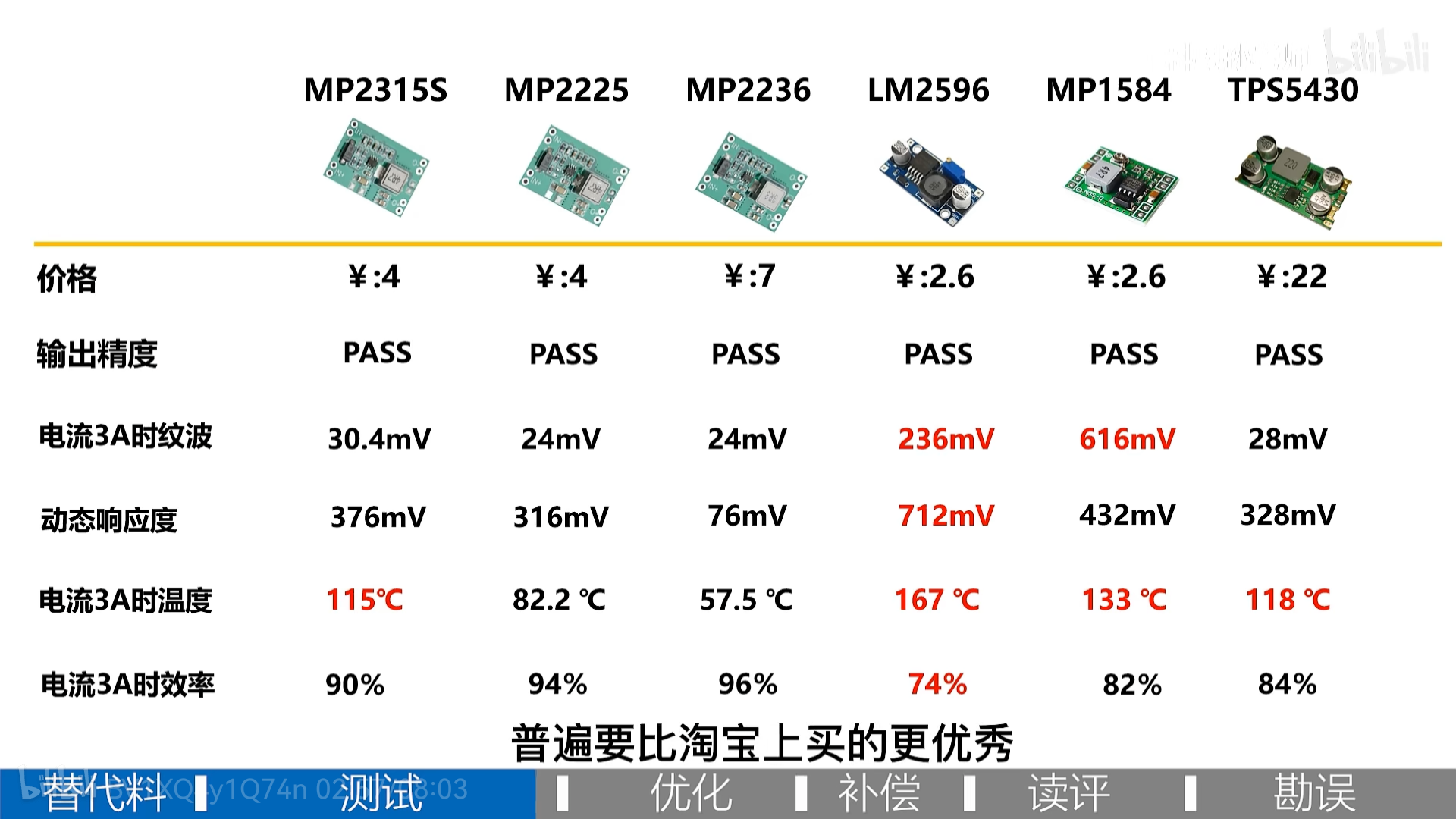
2 物料选型
**主要包括四种元器件:**MOS、电感、输入电容、输出电容。
-
1 芯片:
-
在厂家官网选,国外常见厂家:TI、MPS
-
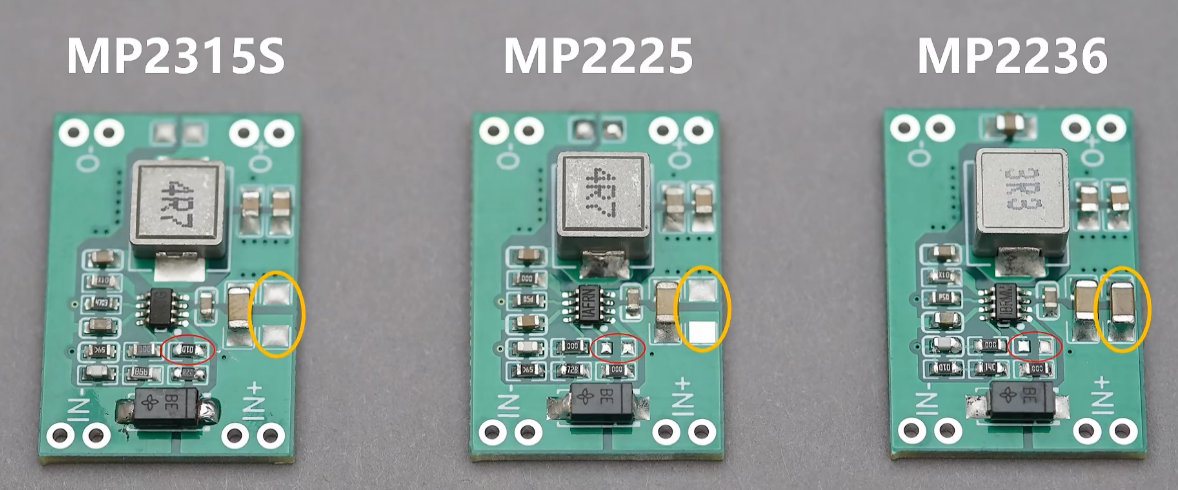
MPS的MP2315S
-
电压
-
电流
-
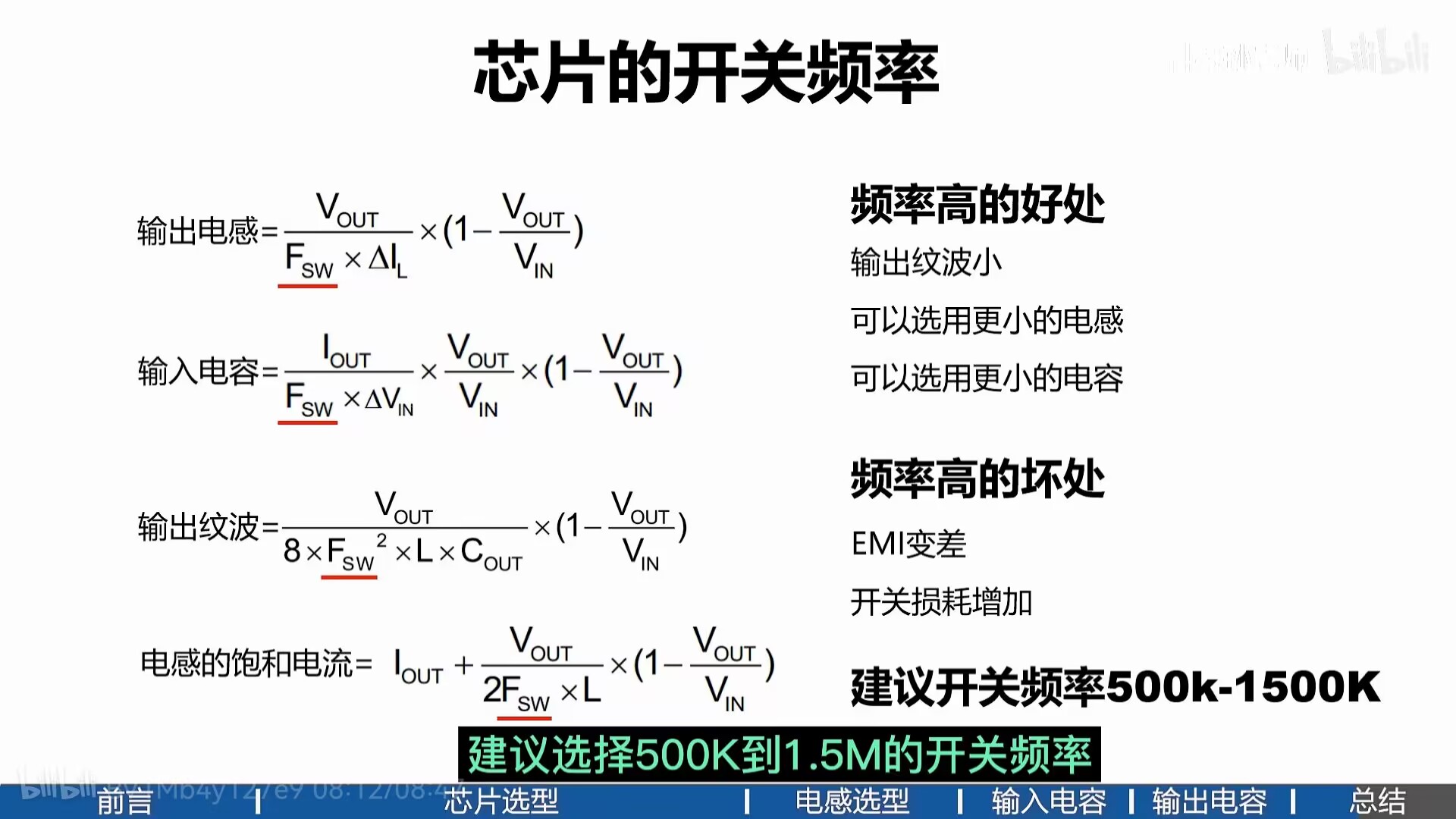
开关频率
-
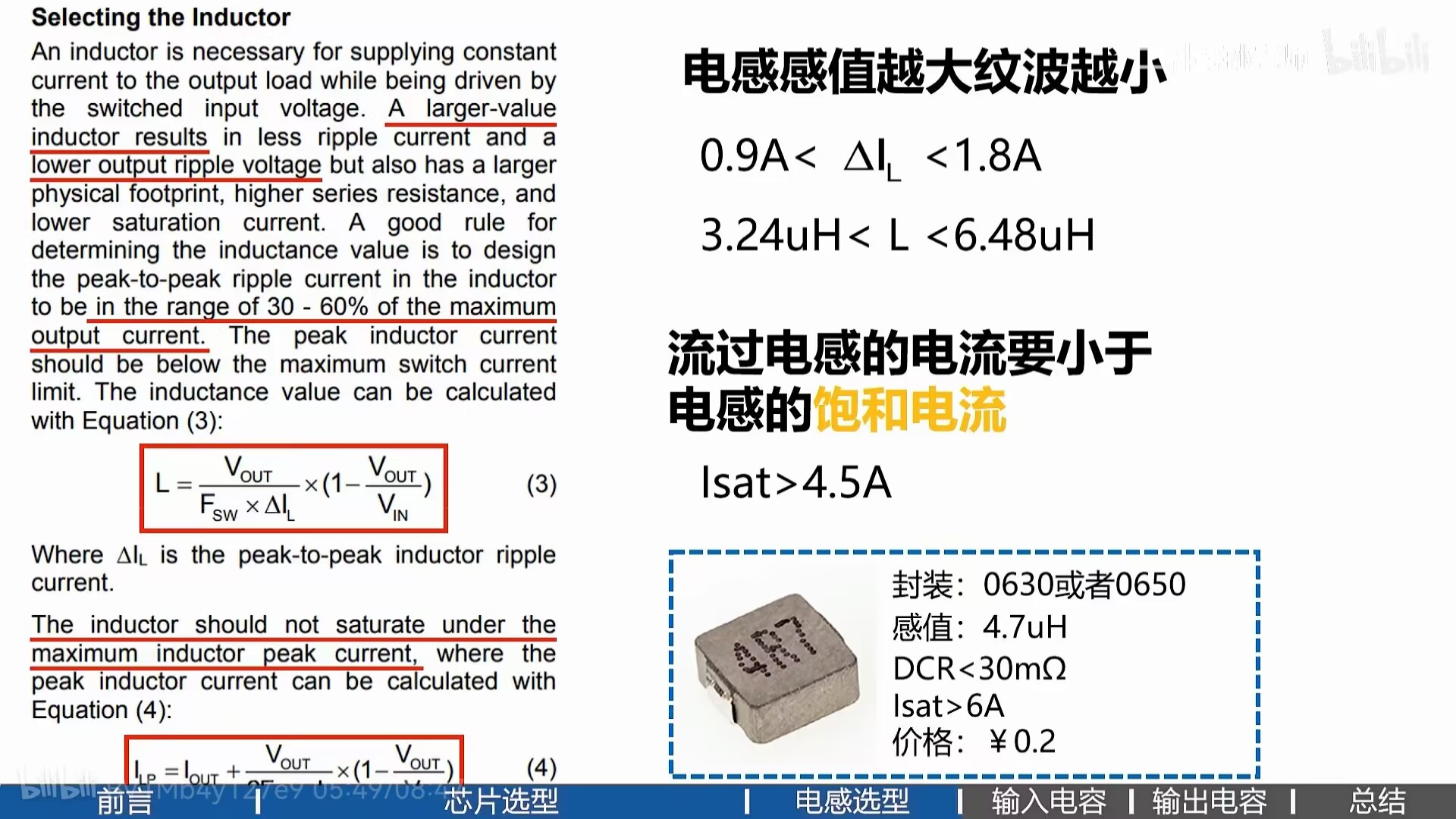
2 电感:
-
感值:电感感值越大,纹波越小。
-
饱和电流:流过电感的电流,要小于其饱和电流。
-
3 输入电容
-
容值:越大越好
-
耐压:大于输入。

-
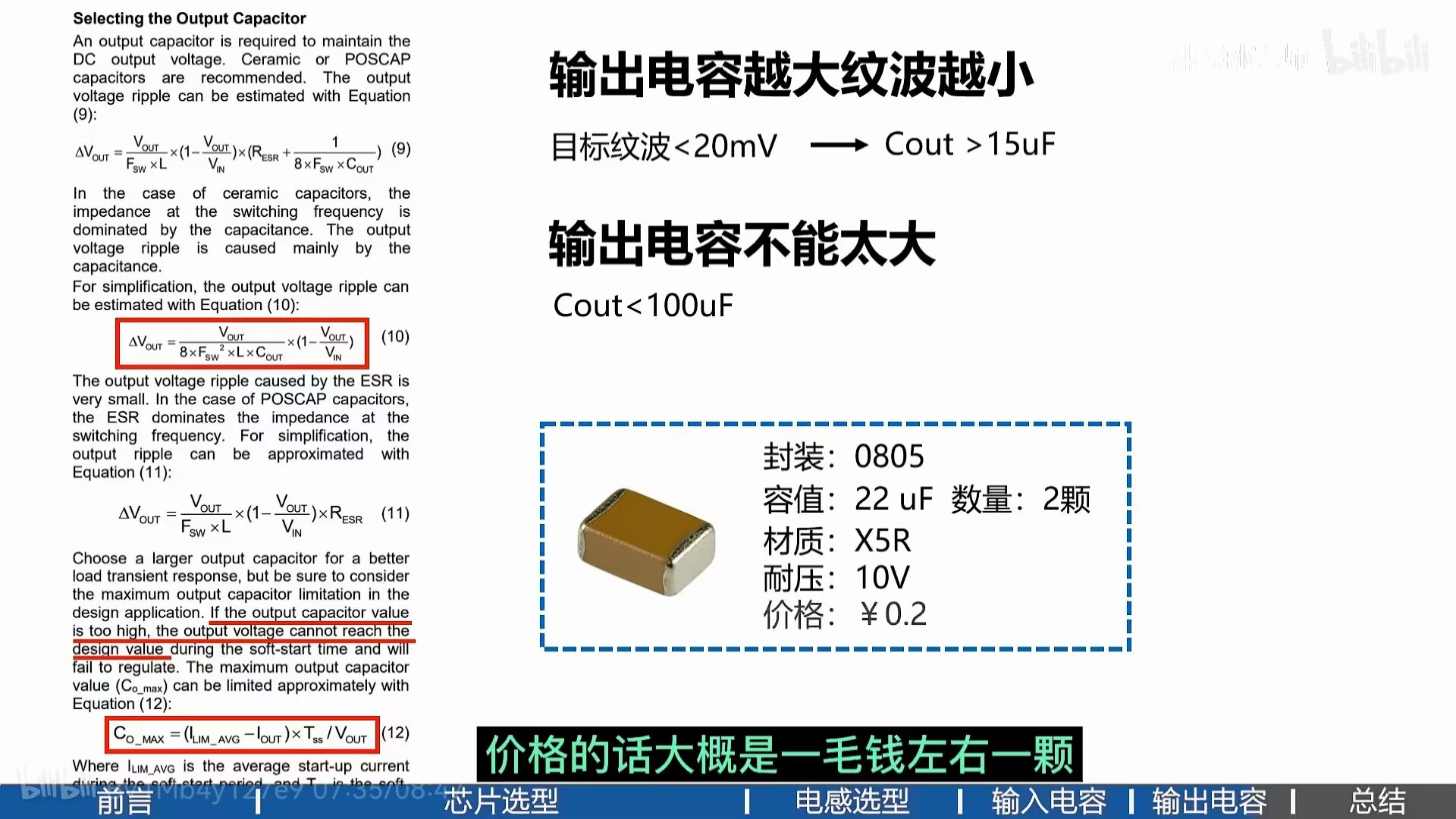
4 输出电容
- 容值:越大纹波越小。
- 耐压:大于输出。
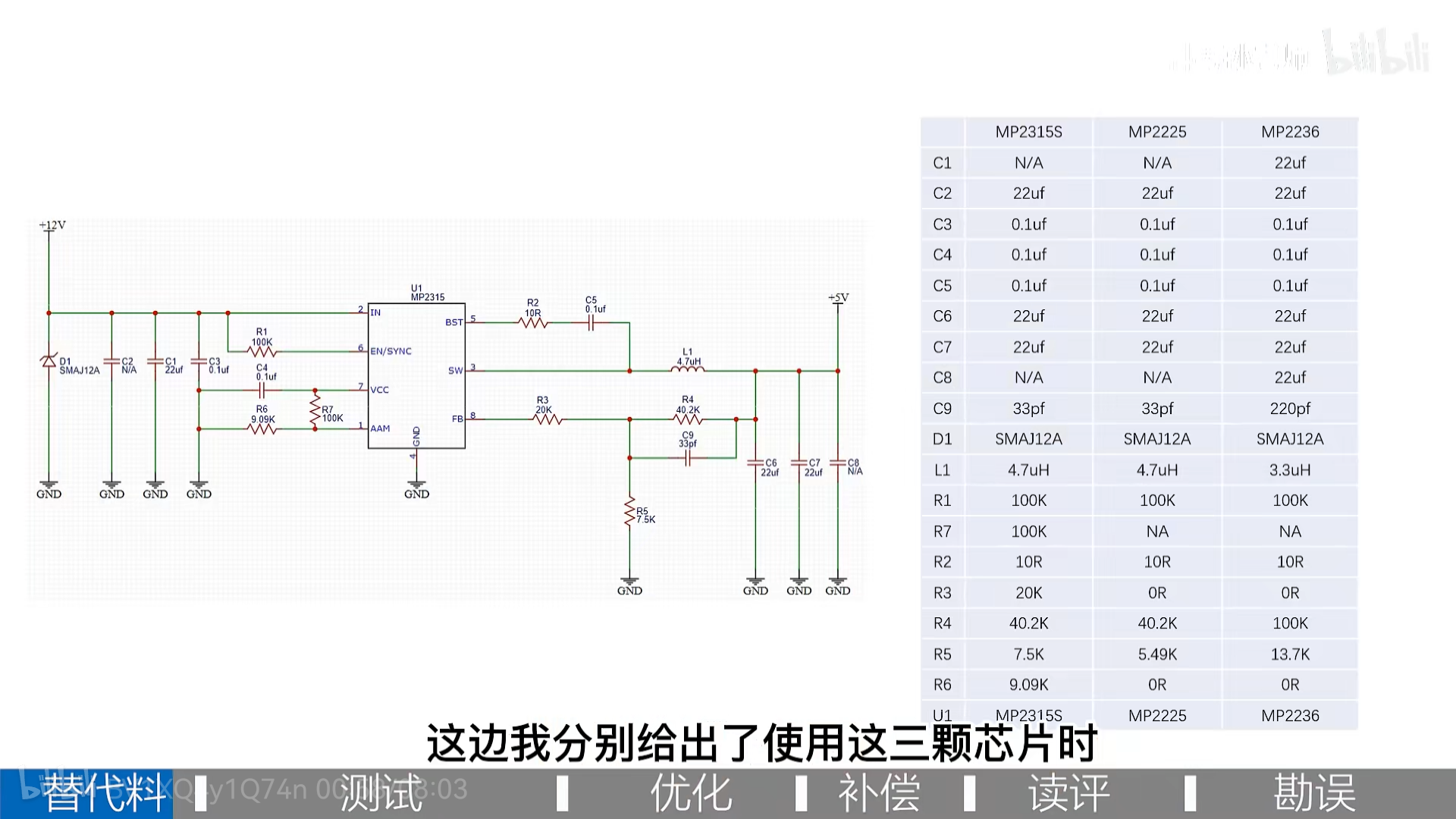
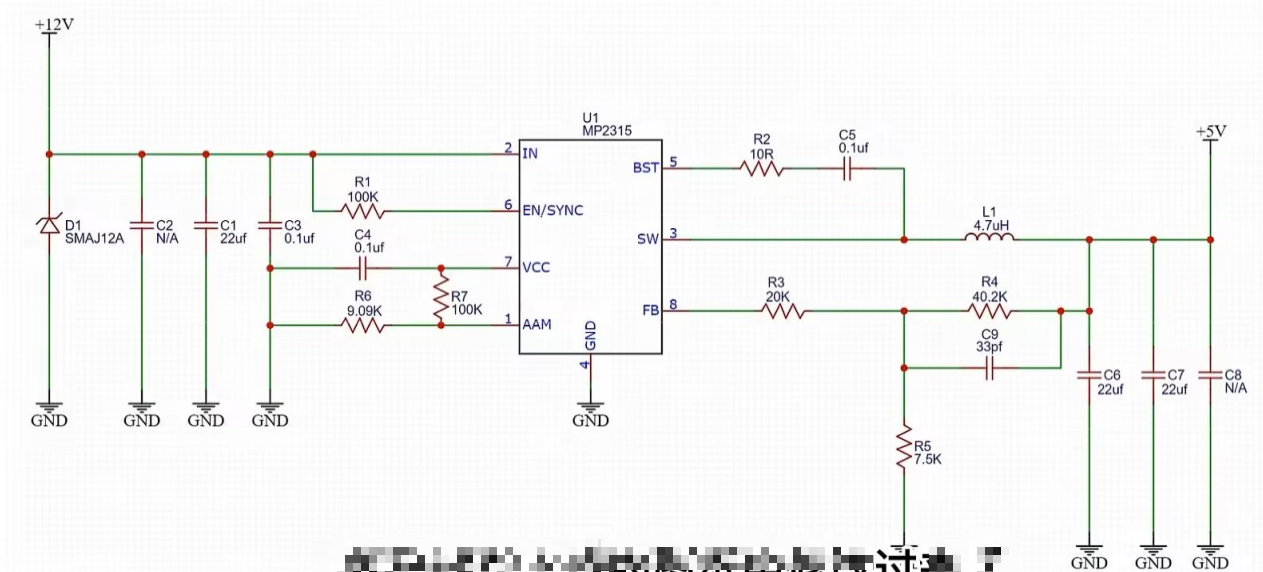
3 电路设计
-
原理图(mp2315数据手册)
- IN:输入。
- SW:输出。
- EN:使能。
- VCC:是因为芯片内部有一个LDO线性稳压,需要外接一个滤波电容。
- FB:反馈。调节输出电压。
- AMM:模式选择。高级异步调制,不使用。
- BST:外接自举电路。(不晓得干嘛用)
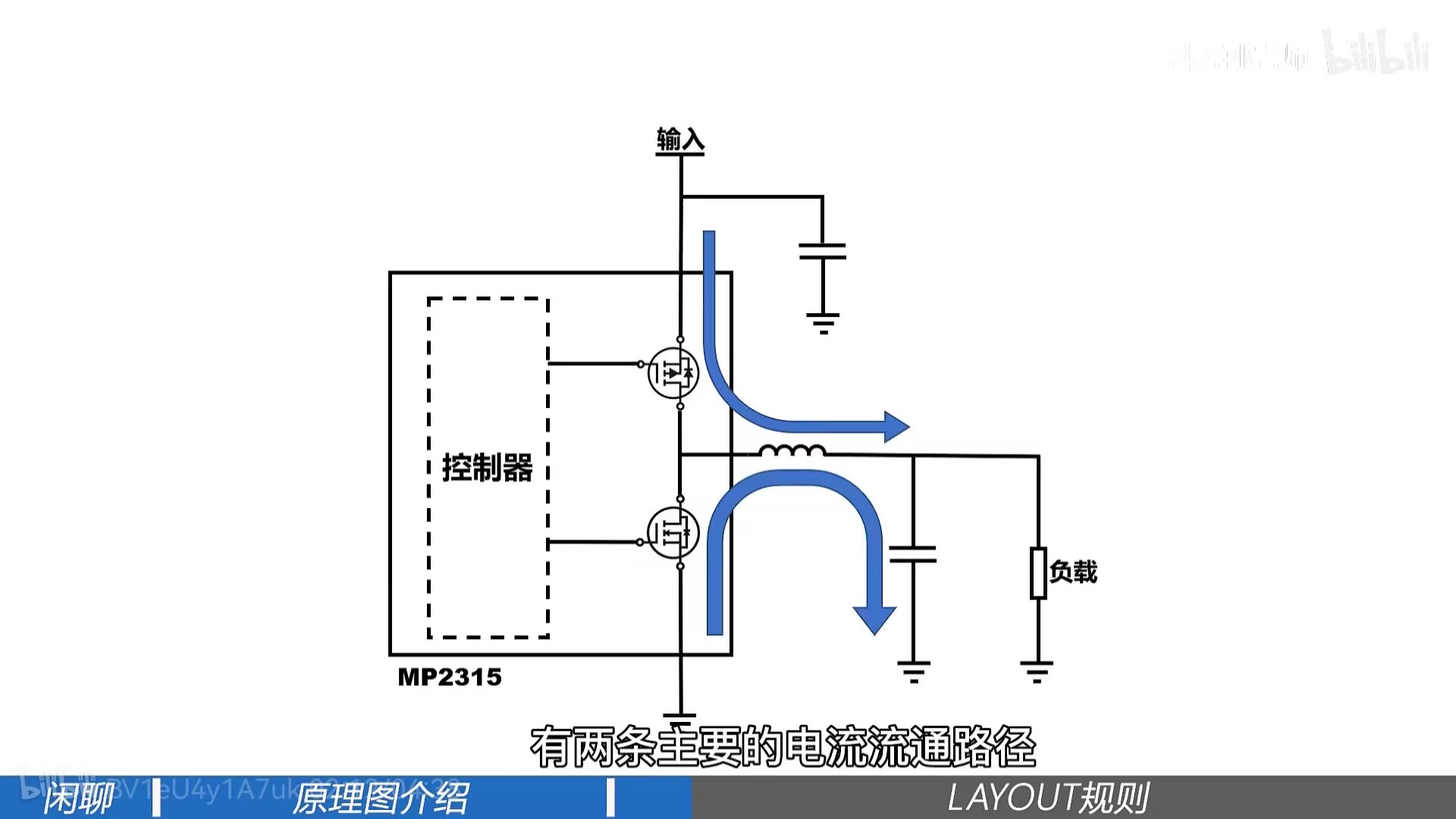
4 布局布线:
-
通顺:两条主要的电流路径要短、宽。
- 布局时先布局主线电流流过的器件,做好铜皮代替走线的布局准备。
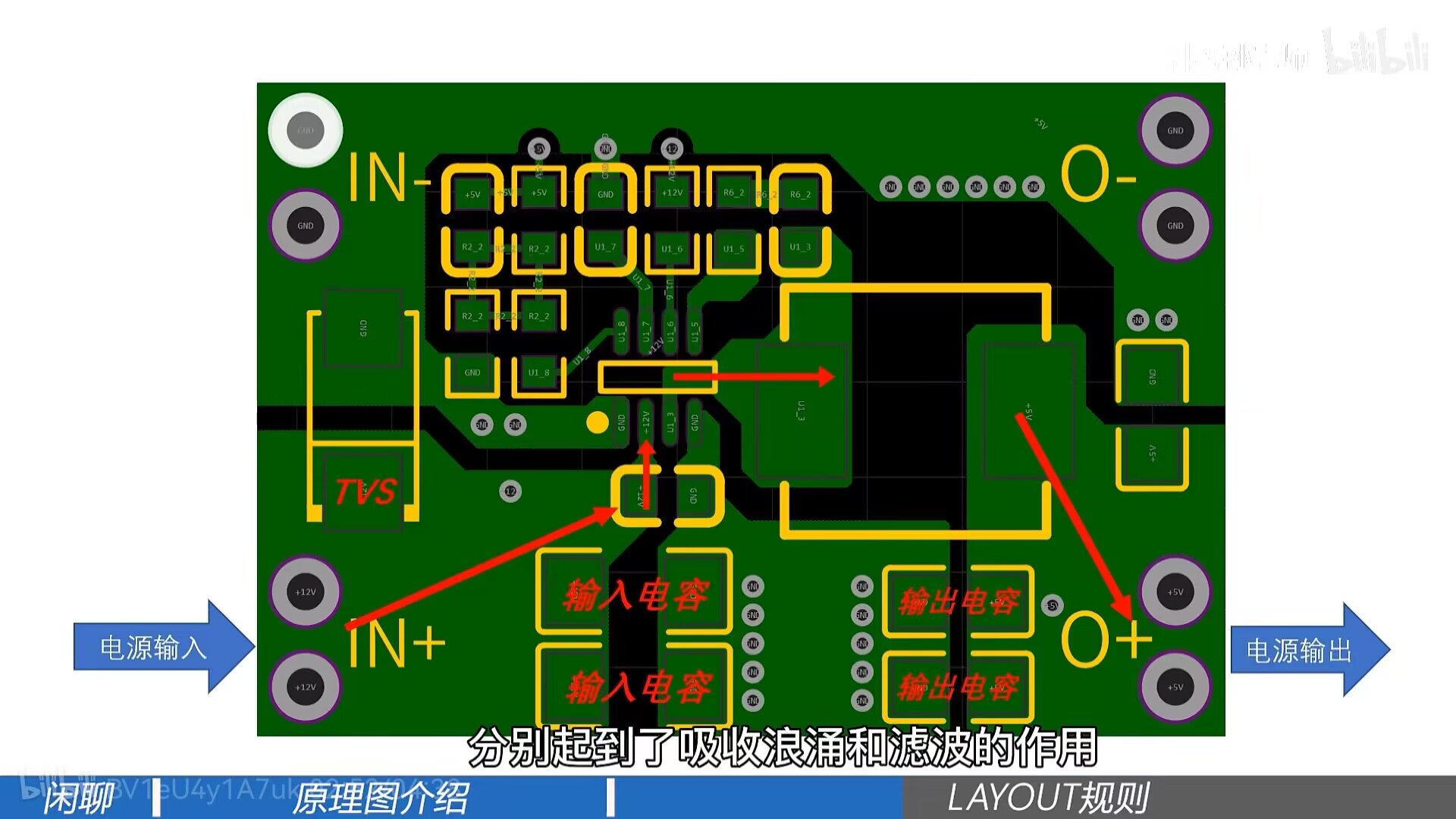
-
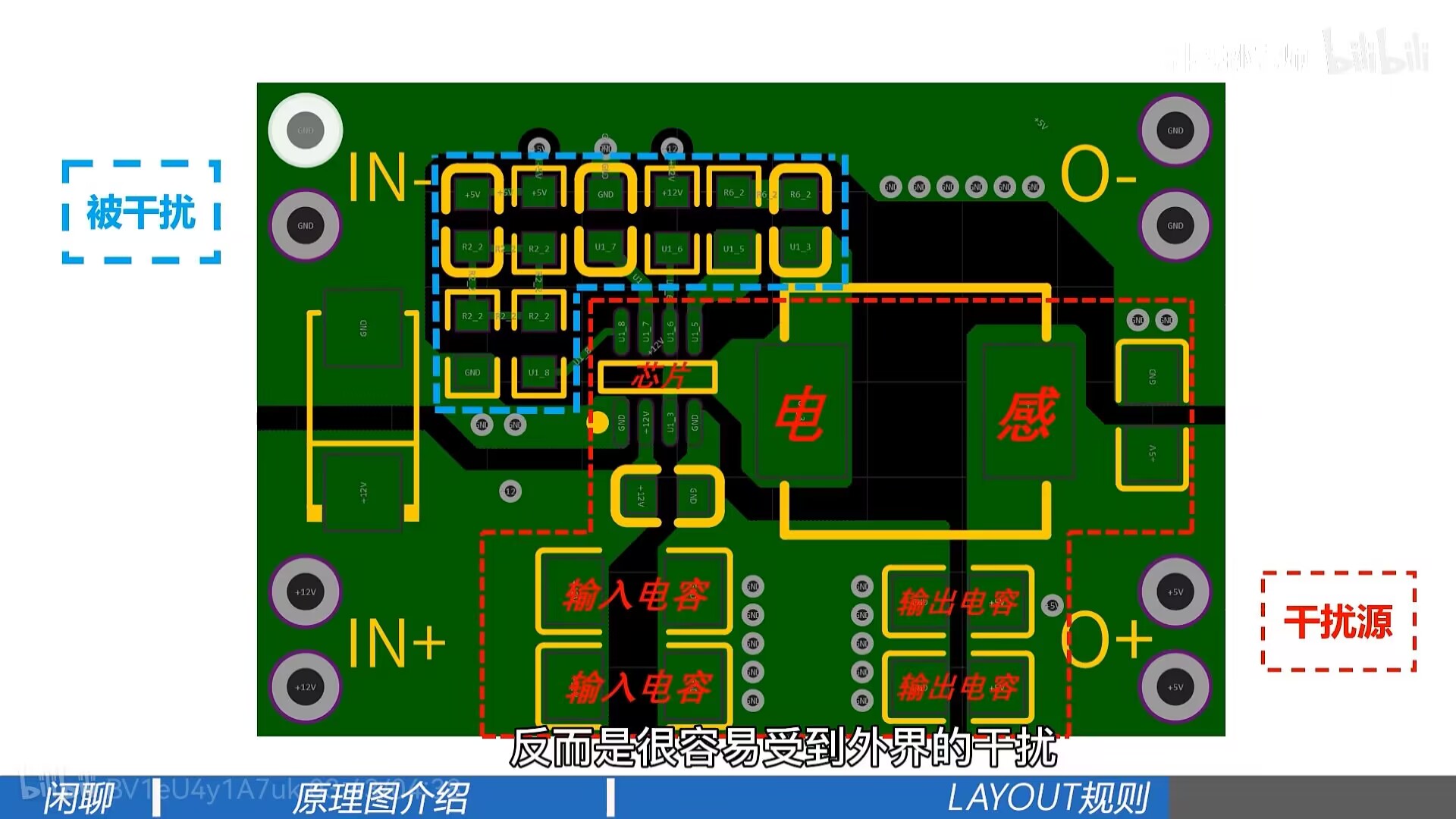
防干扰:
- 布局其他器件尽量放另一边,防干扰。分成干扰源和被干扰区。
- 反馈线
- 布线尽量避开干扰源:芯片和电感。
- 起点放在输出电容附近,那边电源比较纯净。
- 用铺地包裹。啥作用?
5 模块测试:
1 LDO
1 ASM1117
2 XC6204B 332
2 防反接
电路1:二极管
电路简单,有压降有损耗。推荐小于2A的电路使用。
电路2:MOS管。
电路复杂,损耗小。
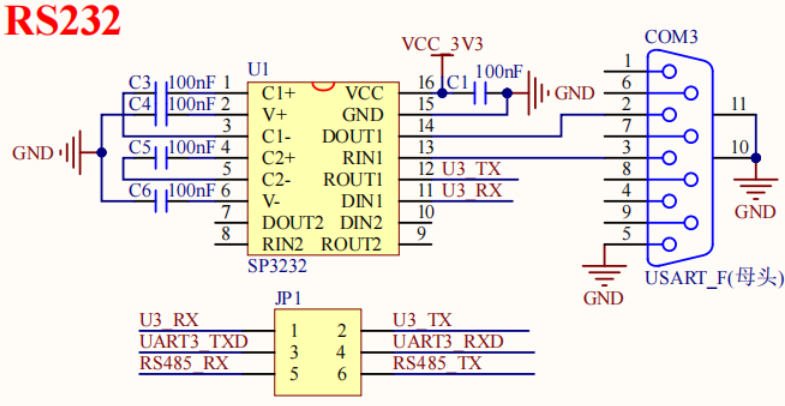
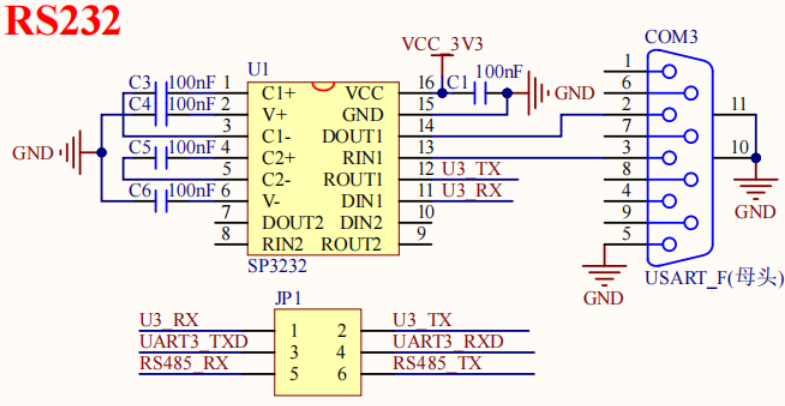
3 RS232/RS485/RS422
1 RS232
RS232就是在UART的基础上,把电平范围拉到了正负15伏,用于抵抗干扰。
2 RS485
RS485是在RS232的基础上进一步提升,将单端信号变成了差分信号,两条线来表示1个信号量。只能半双工,所以需要MCU去切换收发模式。电路有手动切换和自动切换。
MCU切换收发:
SP3485
自动切换收发:(少用一个IO)
SP3485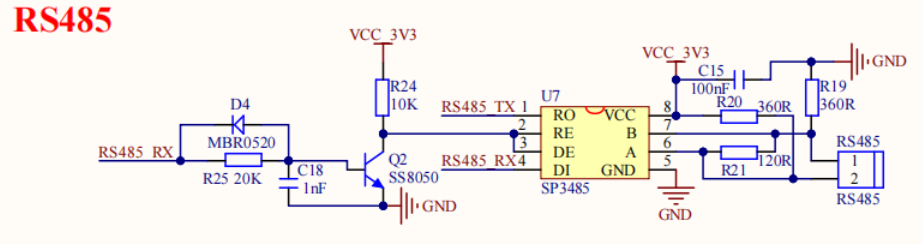
3 RS422
原理图基本的几个点:
1 AY上拉,BZ下拉;
2 ABYZ加TVS保护,保险丝;
3 在AB、YZ间加入终端电阻120欧姆。(了匹配双绞线的阻抗,缺点是压降功耗http://t.csdn.cn/CFtVj)
SP3491 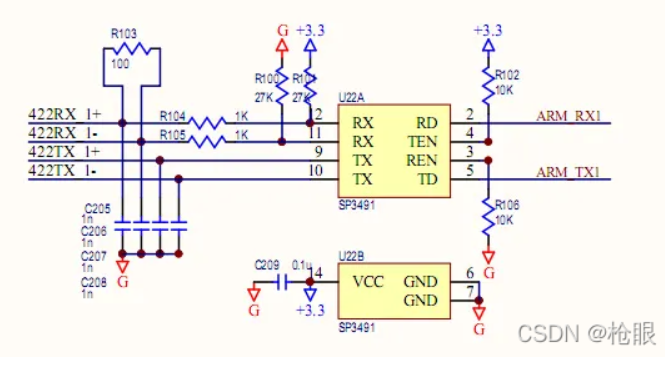
SP3490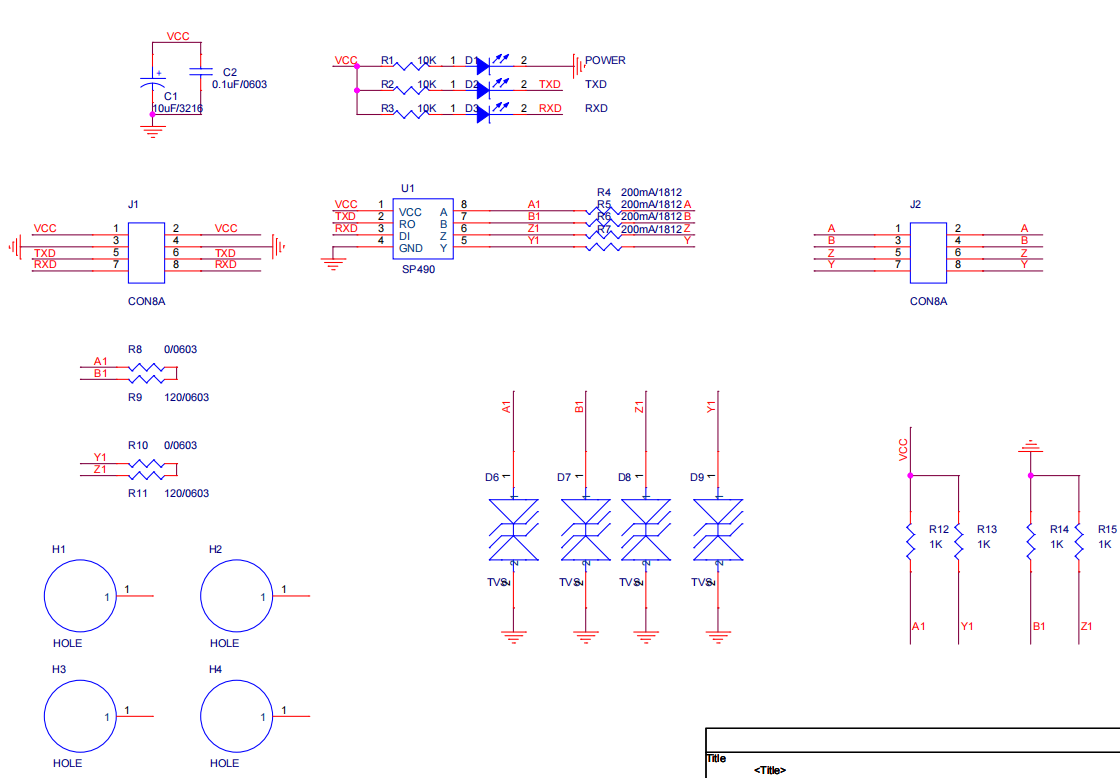
MAX490/MAX3490(更完善了,增加了输入信号上拉,TVS加了两个)
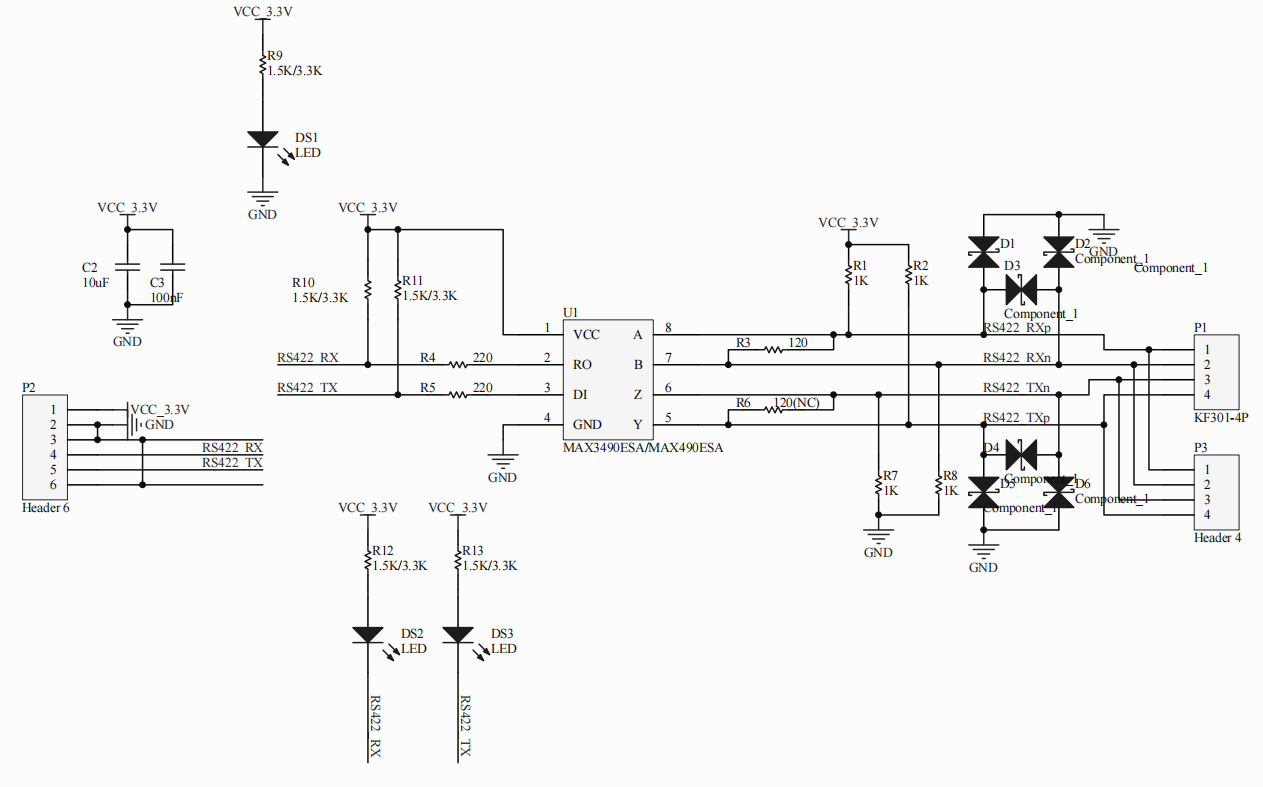
对比总结:

3 RS422
4 上/下拉电阻
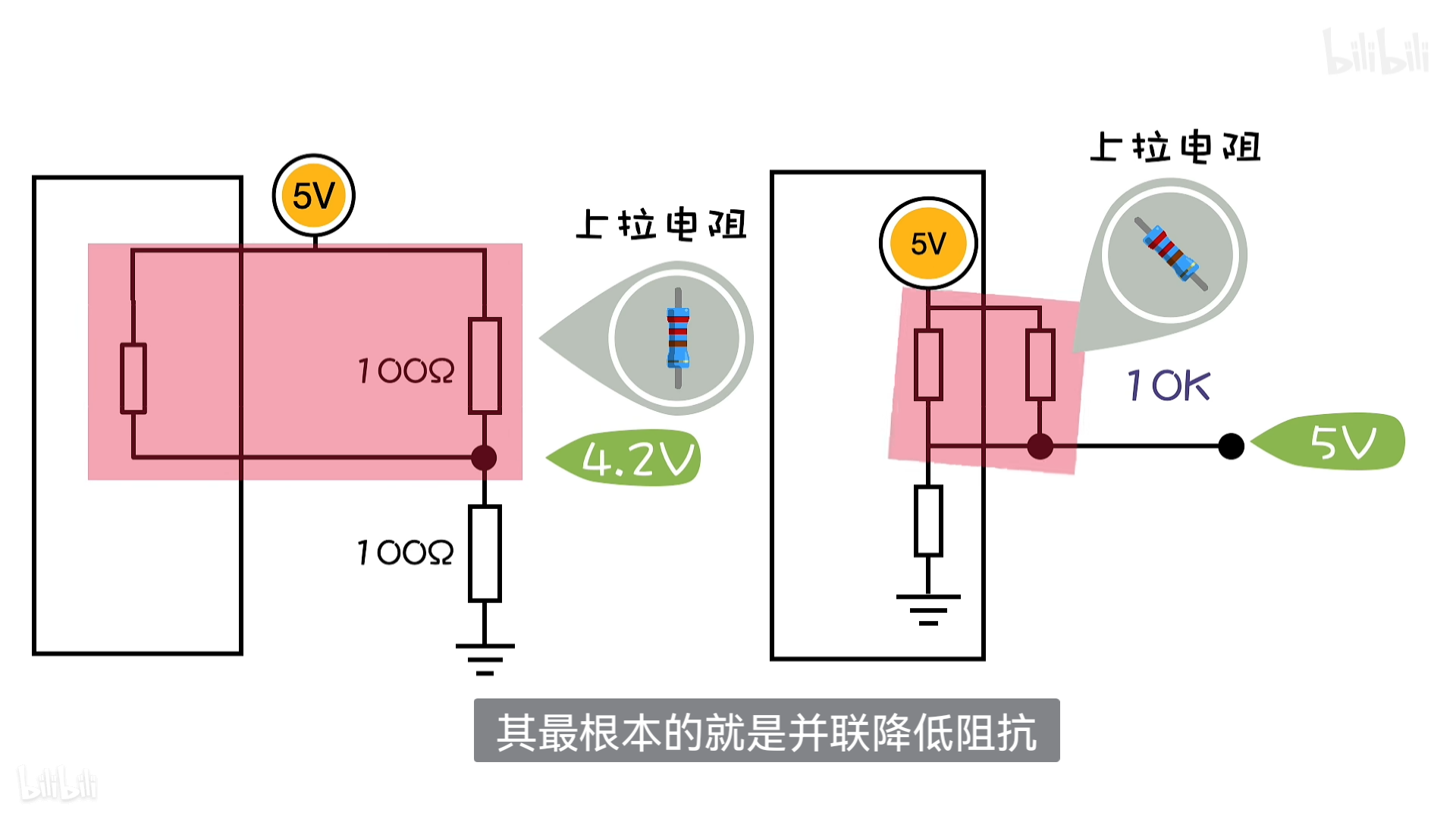
上拉电阻
作用:1增加引脚驱动能力2钳位不确定电平
根本原理:通过并联降低阻抗,使输出端获得更大的电压。
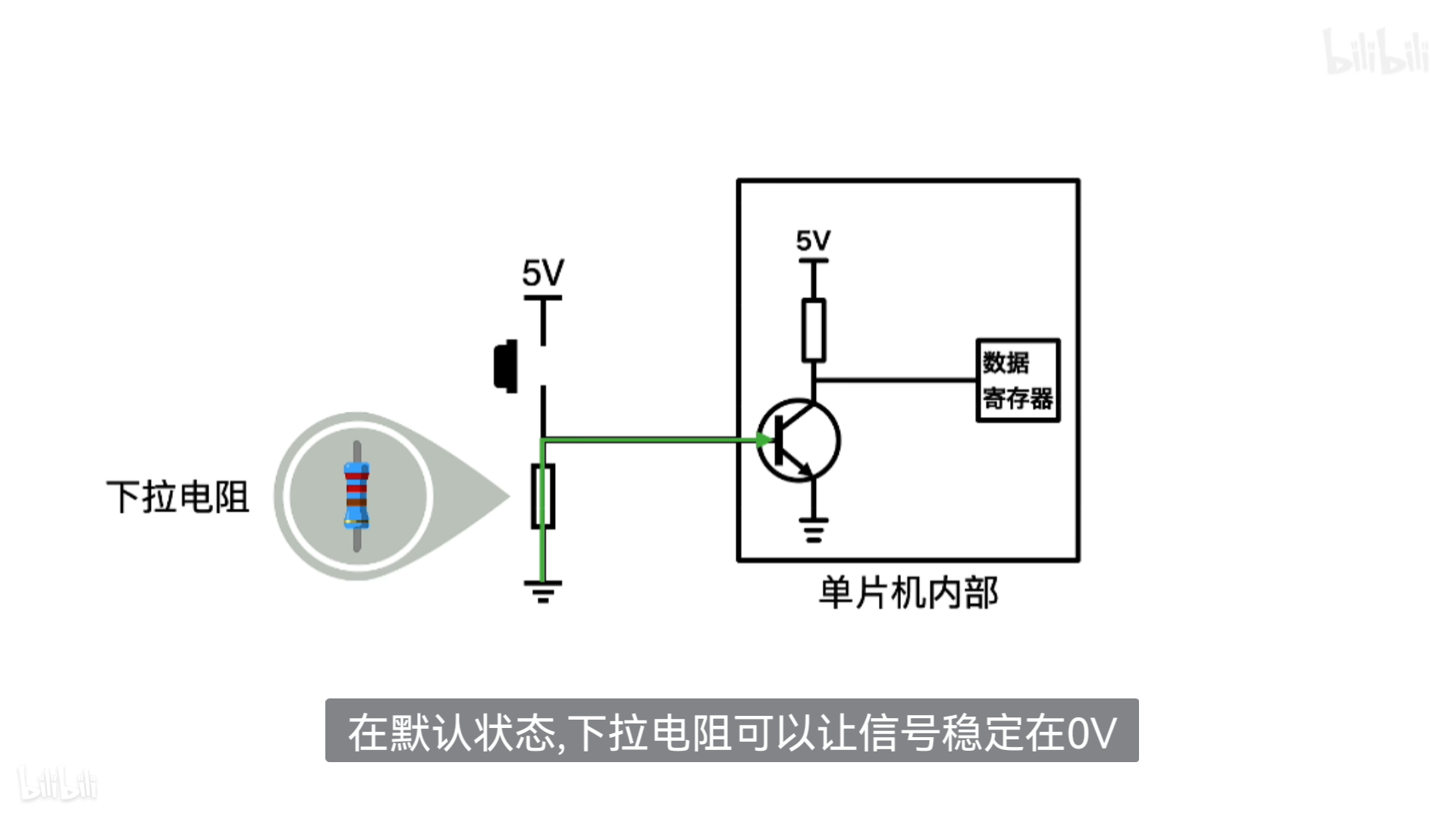
下拉电阻:
作用:1将输入引脚默认电压设置为0
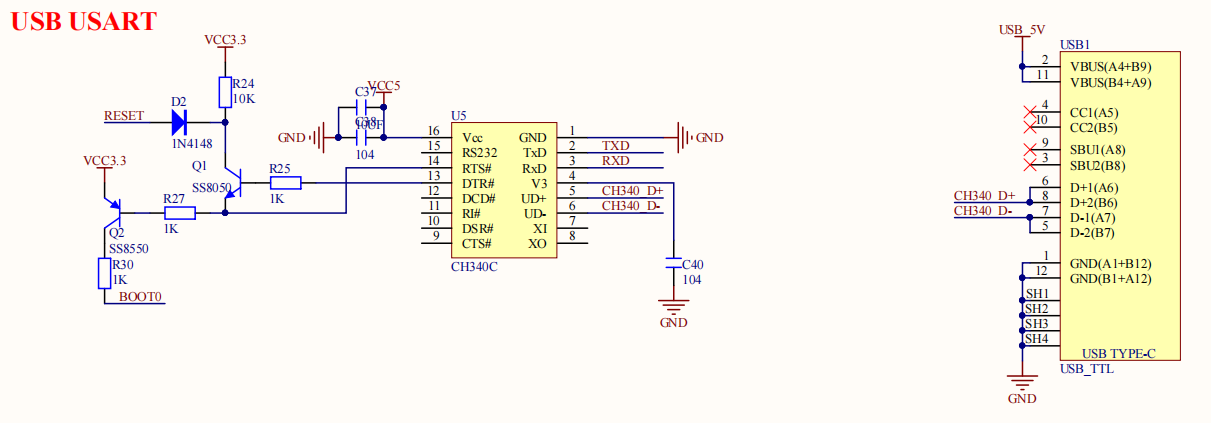
5 typec转TTL(ch340N)
1 CH340N
电路图要点:
1 typec CC1 CC2 下拉。
2 VCC可输入3.3和5,对应输出TTL电平也是3.3和5。
3 V3引脚,3.3供电时接3.3,5V供电时接0.1uf电容。
4 旁路电容:100nf+10uf

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)