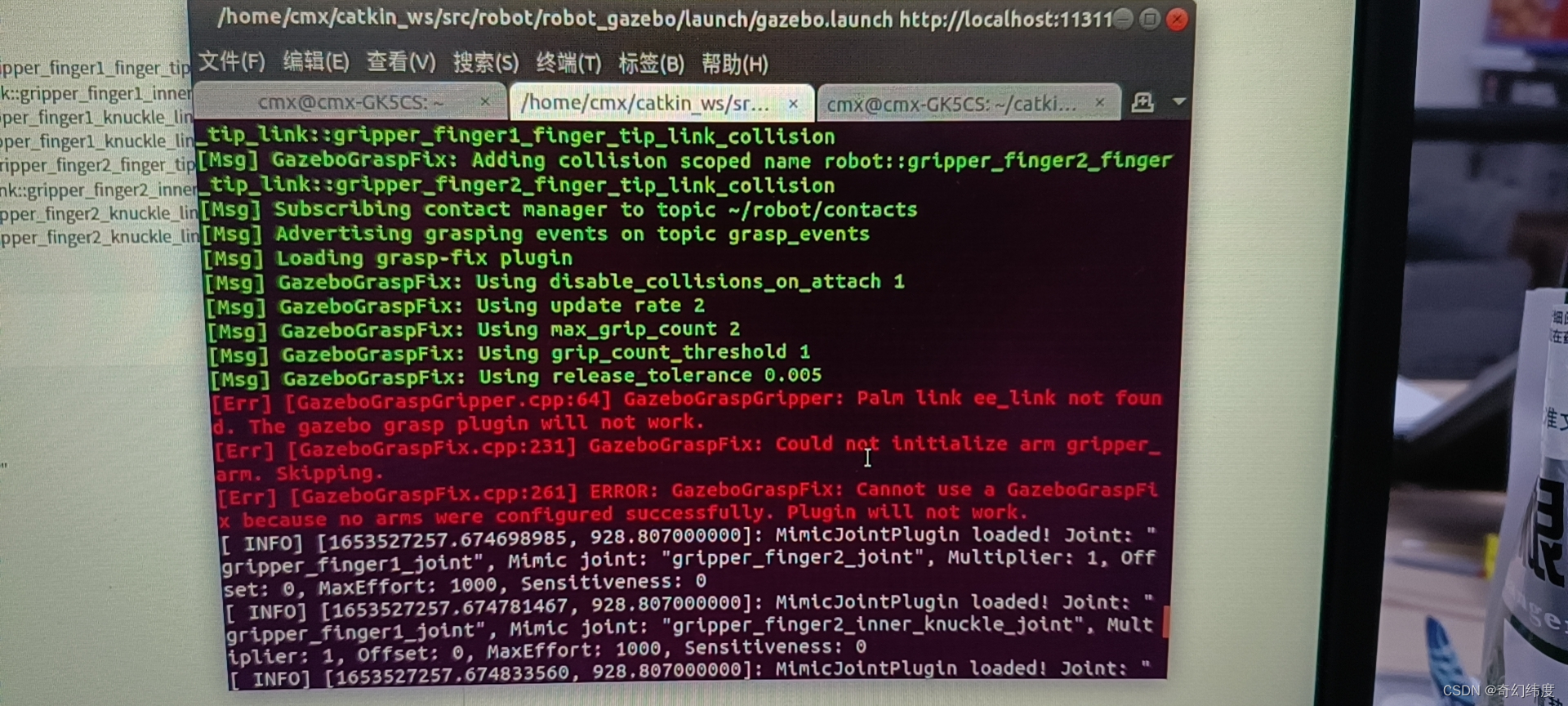
Gazebo加载grasp-fix插件报错:
[Err] [GazeboGraspGripper.cpp:64] GazeboGraspGripper: Palm link ee_link not found. The gazebo grasp plugin will not work.
[Err] [GazeboGraspFix.cpp:231] GazeboGraspFix: Could not initialize arm gripper_arm. Skipping.
[Err] [GazeboGraspFix.cpp:261] ERROR: GazeboGraspFix: Cannot use a GazeboGraspFix because no arms were configured successfully. Plugin will not work.
在机械臂抓取小方块的时候直接挂掉,究其原因是grasp-fix插件加载不成功
仔细分析发现:grasp-fix插件加载了两次,查看夹爪的urdf文件,发现下载的夹爪功能包中robotiq_85_gripper.urdf.xacro文件也加载了gazebo_grasp_fix插件,将其注释掉
 运行后发现,grasp_fix插件可以正常加载,也可以抓取到小方块
运行后发现,grasp_fix插件可以正常加载,也可以抓取到小方块
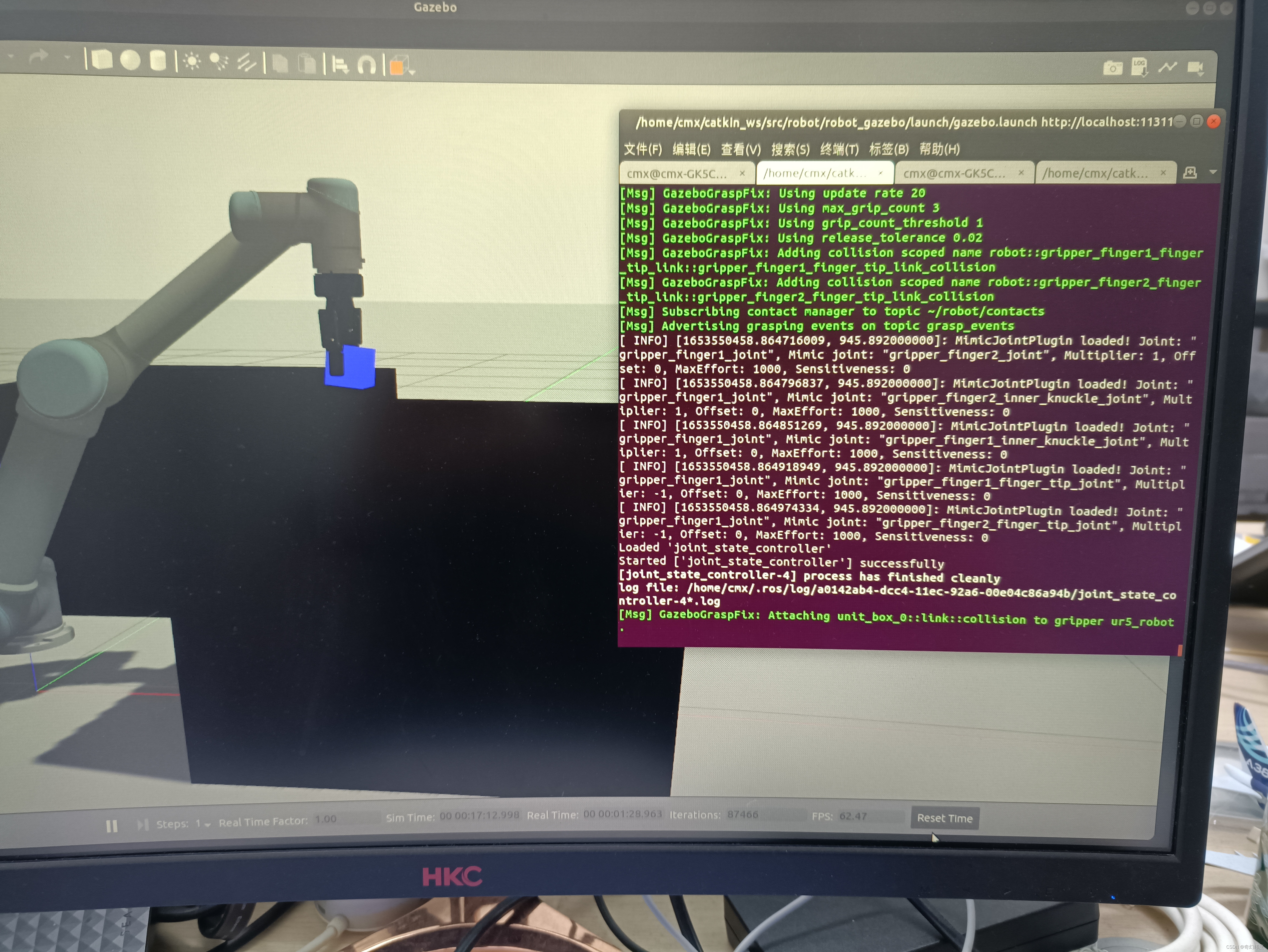
目前存在一个小问题:就是小方块容易在夹爪上滑落,盲猜是参数的问题,需要进一步调整
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)