仅作为个人学习,原文地址:链接: link.
AprilTag的简介
AprilTag是一个视觉基准系统,可用于各种任务,包括AR,机器人和相机校准。这个tag可以直接用打印机打印出来,而AprilTag检测程序可以计算相对于相机的精确3D位置,方向和id。
AprilTag的种类
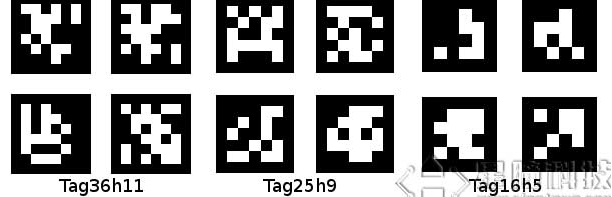
AprilTag的种类叫家族(family),有下面的几种:
TAG16H5 → 0 to 29
TAG25H7 → 0 to 241
TAG25H9 → 0 to 34
TAG36H10 → 0 to 2319
TAG36H11 → 0 to 586
ARTOOLKIT → 0 to 511
也就是说TAG16H5的家族(family)有30个,每一个都有对应的id,从0~29。
那么不同的家族,有什么区别呢?
比如说TAG16H5的有效区域是4 x 4的方块,那么它比TAG36H11看的更远(因为他有6 x 6个方块)。但是TAG16H5的错误率比TAG36H11高很多,因为TAG36H11的校验信息多,所以,如果没有别的理由,推荐用TAG36H11。
AprilTag基础使用代码
# AprilTags Example
#
# This example shows the power of the OpenMV Cam to detect April Tags
# on the OpenMV Cam M7. The M4 versions cannot detect April Tags.
import sensor, image, time, math
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger...
sensor.skip_frames(30)
sensor.set_auto_gain(False) # must turn this off to prevent image washout...
sensor.set_auto_whitebal(False) # must turn this off to prevent image washout...
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
for tag in img.find_apriltags(): # defaults to TAG36H11 without "families".
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
degress = 180 * tag.rotation() / math.pi #弧度转化为角度
print(tag.id(),degress)
3D定位
AprilTag最神奇的是3D定位的功能,它可以得知Tag的空间位置,一共有6个自由度,三个位置,三个角度。
# AprilTags Example
#
# This example shows the power of the OpenMV Cam to detect April Tags
# on the OpenMV Cam M7. The M4 versions cannot detect April Tags.
import sensor, image, time, math
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger...
sensor.skip_frames(30)
sensor.set_auto_gain(False) # must turn this off to prevent image washout...
sensor.set_auto_whitebal(False) # must turn this off to prevent image washout...
clock = time.clock()
# 注意!与find_qrcodes不同,find_apriltags 不需要软件矫正畸变就可以工作。
# 注意,输出的姿态的单位是弧度,可以转换成角度,但是位置的单位是和你的大小有关,需要等比例换算
# f_x 是x的像素为单位的焦距。对于标准的OpenMV,应该等于2.8/3.984*656,这个值是用毫米为单位的焦距除以x方向的感光元件的长度,乘以x方向的感光元件的像素(OV7725)
# f_y 是y的像素为单位的焦距。对于标准的OpenMV,应该等于2.8/2.952*488,这个值是用毫米为单位的焦距除以y方向的感光元件的长度,乘以y方向的感光元件的像素(OV7725)
# c_x 是图像的x中心位置
# c_y 是图像的y中心位置
f_x = (2.8 / 3.984) * 160 # 默认值
f_y = (2.8 / 2.952) * 120 # 默认值
c_x = 160 * 0.5 # 默认值(image.w * 0.5)
c_y = 120 * 0.5 # 默认值(image.h * 0.5)
def degrees(radians):
return (180 * radians) / math.pi
while(True):
clock.tick()
img = sensor.snapshot()
for tag in img.find_apriltags(fx=f_x, fy=f_y, cx=c_x, cy=c_y): # 默认为TAG36H11
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
print_args = (tag.x_translation(), tag.y_translation(), tag.z_translation(), \
degrees(tag.x_rotation()), degrees(tag.y_rotation()), degrees(tag.z_rotation()))
# 位置的单位是未知的,旋转的单位是角度
print("Tx: %f, Ty %f, Tz %f, Rx %f, Ry %f, Rz %f" % print_args)
print(clock.fps())
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)