Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
Inter RealSense D435i摄像头有驱动但是连接不上
2023-05-16
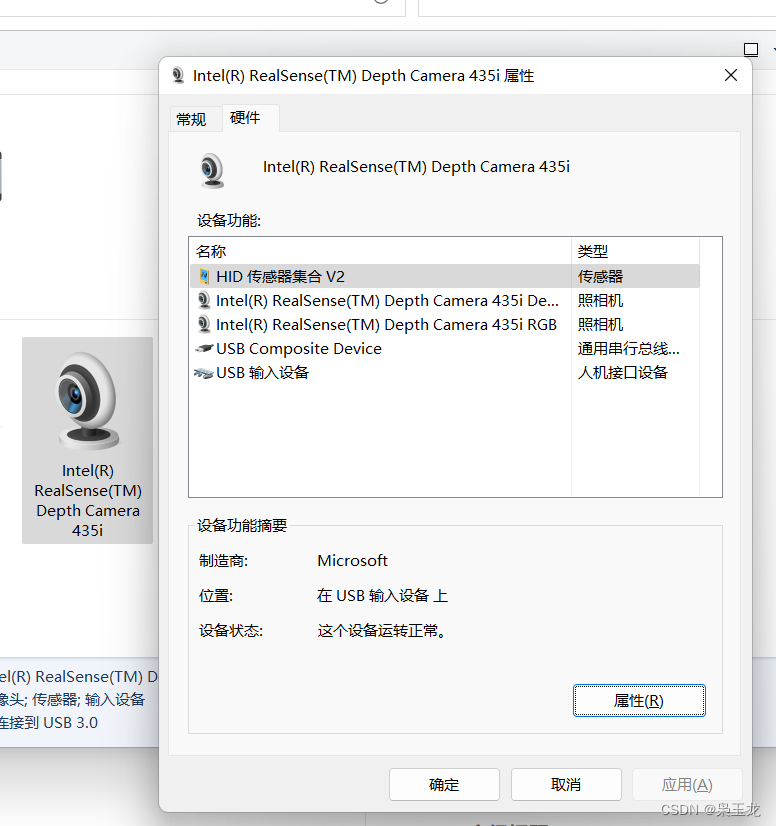
第一步:打开电脑设置,找到设备和打印界面,找到对应连接的是摄像头设备
第二步:打开对应的相机设置属性界面
第三步:选择硬件属性
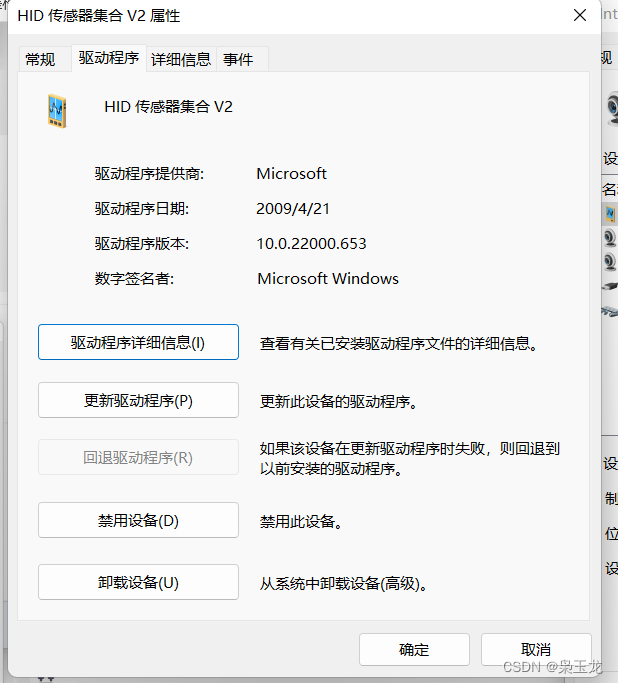
第四步:点击驱动程序进行点击更新驱动程序
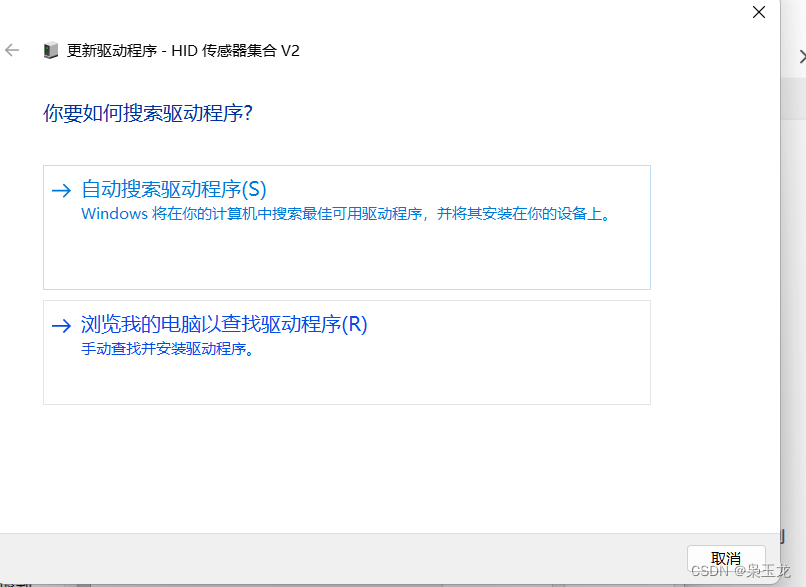
第五步:点击浏览我的电脑以查找驱动程序
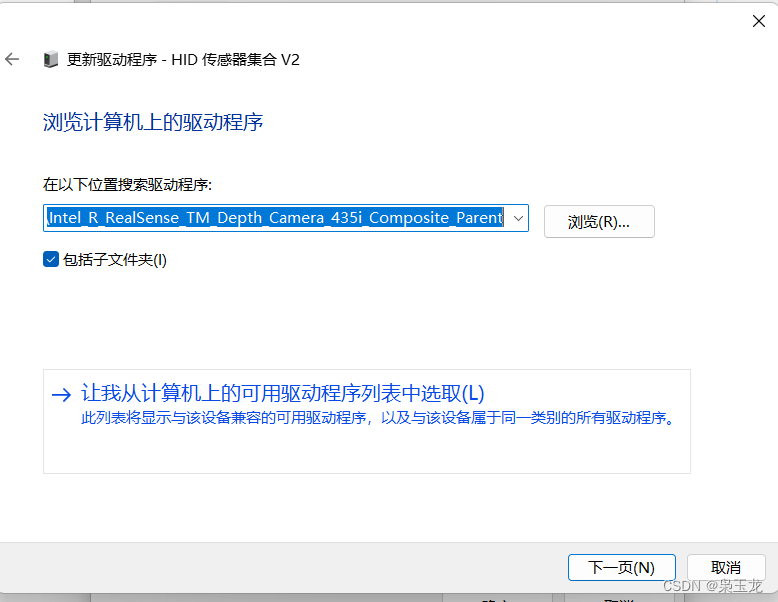
第六步:点击让我从计算机上选取驱动
第七步:找到USB进行设置就完成了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
inter
Realsense
D435i
摄像头有驱动但是连接不上
Inter RealSense D435i摄像头有驱动但是连接不上 的相关文章
realsense D435 标定(calibration)
realsense D435 标定 文章目录 realsense D435 标定1 确定是否需要标定设备信息步骤操作打印标定目标开启标定程序 校正结果展示比较 文档 1 确定是否需要标定 工具 Depth Quality Tool 要求 将
D435i和T265配置启动
安装realsense sdk和realsense的ros包 1 https blog csdn net qq 42800654 article details 109393646 2 https github com IntelRealS
ubuntu18.04安装Realsense D435i 摄像头的SDK和ROS Wrapper
1 安装参考链接 2 报错链接 3 没有找到rgbd launch 无法定位软件包
深度相机使用对比:Gemini Pro与RealSense D435i
文章目录 前言一 参数对比二 环境配置三 实际使用效果图像读取视觉slam效果对比 总结 前言 为了开展视觉slam相关项目 xff0c 最近找了几款不同的深度相机进行测试 xff0c 本次主要讲一下奥比中光的Gemini Pro相机与In
ubuntu 16.04使用IntelRealSense D435i调用realsense ROS包时,报symbol lookup error和undefined symbol错误的解决办法
在ubuntu 16 04使用IntelRealSense D435i调用realsense ROS包时 xff0c 运行 roscore roslaunch realsense2 camera rs rgbd launch 出现错误 xf
Nvidia Jetson TX2+Intel Realsense D435i跑ORB_SLAM3
前言 xff1a 网上的教程实在是太多 xff0c 从诸多教程中找到一个适合自己的实属不易 将此记录下来 xff0c 希望能够帮助到有需要的人 因为时间紧迫 xff0c 没时间写特别详细的内容 xff0c 只能引用一些他人的步骤 请见谅 x
realsense d435i获取某像素点三维坐标(计算深度和点云两种方法)
这篇写的比较详细但也比较乱 xff0c 另一篇思路更清晰和简介一点 xff0c 可供参考 xff1a Ubutntu下使用realsense d435i xff08 二 xff09 xff1a 获取某二维像素点的三维坐标 00 说明 代码1
ros realsense D435i摄像头配置
ros realsense D435i摄像头配置 之前在ubunut18中配置了ROS环境 xff0c 现在需要在此基础上 xff0c 配置D435i相机的SDK和ROS包 一 参考 https github com IntelRealSe
树莓派4B(ubuntu mate系统)使用d435i运行vins
树莓派4B xff08 ubuntu mate系统 xff09 使用d435i运行vins 提示本文为随手笔记 xff0c 并不严谨 xff0c 可参考 xff1a 博客和博客进行配置 树莓派 ubuntu mate 20系统安装ros的步
RealSense二次开发
转载 xff1a librealsense2查看相机设备信息 JavaShuo 文章目录 1 librealsense2设备信息读取 xff12 xff0e realsense 投影函数和反投影函数3 深度相机与彩色相机的坐标变换 1 li
Jetson配置realsense D435i SDK以及realsense-ros
一 命令安装 SDK sudo apt install librealsense2 realsense viewer 测试 realsense ros sudo apt get install ros ROS DISTRO realsens
Realsense D435i 使用
工作之后才发现问题不是单线程地来找你 xff0c 而是多线程并发地涌向你 D435i是一款良心传感器 xff0c 美中不足的是你拿不到广角图像 虽然现在不负责传感器测试了 xff08 老大布置什么 xff0c 打工的就去做什么就好了 xff
VINS on RealSense D435i
关于Realsense D435i运行VINS系列 前言 在SLAM中 xff0c 主要是以激光SLAM和视觉SLAM为主 xff0c 激光雷达直接可以获取三维点云坐标信息 xff0c 所以激光SLAM会比视觉SLAM稳定许多 xff0c
realsense d435i标定imu与camera
realsense d435i标定imu与camera 1 标定目的 realsense d435i包含两个红外相机 红外发射器 RGB相机和IMU四个模块 xff0c 显然四个传感器的空间位置是不同的 xff0c 我们在处理图像和IMU数
ROS与深度相机入门教程:(1)Ubuntu16.04 在ROS中驱动Intel D435i深度相机
Intel在Github上开源了支持所有RealSense系列相机的SDK 包括了D400 SR300系列深度相机和T265双目跟踪相机 支持Linux Windows Mac OS以及Android 链接 https github com
使用 Intel RealSense 采集图片并制作机器视觉数据集
本文章主要涉及以下工作 xff1a xff08 1 xff09 讲述如何使用 Intel RealSense 相机采集RGB图像 深度图像 伪彩色化的深度图像以及 npy 格式保存的深度数据 xff08 2 xff09 采集到的图像可适用于
ubuntu16.04安装realsense D435i驱动及固件
安装Realsense SDK xff1a 1 下载source并且确定git版本 xff1a 1 git clone https github com IntelRealSense librealsense xff08 下载源 xff09
【3D视觉】realsense D435三维重建
1 xff0c 硬件 xff1a realsense D435 驱动及SDK开发包安装 GitHub IntelRealSense librealsense Intel RealSense SDK 下载最新驱动 安装后打开 Intel Re
realsense系列(三):播放深度图和RGB图
播放深度图和RGB图 本次任务使用方法总结 本次任务 利用realsenseviewer软件播放深度图和RGB图 使用方法 1 将realsense连接上计算机 然后打开realsenseviewer软件 点击Add Source Load
Ubuntu16.04及ROS Kinetic环境下安装使用RealSense SR300
Ubuntu16 04及ROS Kinetic环境下安装使用RealSense SR300 1 准备条件 需要安装Ubuntu16 04及ROS Kinetic 2 安装驱动 安装realsense的驱动流程可以根据Github上的官方推荐
随机推荐
CMake Error at /opt/ros/noetic/share/catkin/cmake/safe_execute_process.cmake:11 (message): execute
在ROS自定义话题消息的时候 xff0c 在创建完msg文件 xff0c 原因是msg文件里面uint8 xff0c 没有加上8 第三天加更 后面我又遇到这种情况 xff0c 错误内容一摸一样 xff0c 但是我检查了好多地方都没有错误 我
ROS工作空间中src文件中add_executable、target_link_libraries函数修改
一 通信部分 我正在学习ROS中的通信部分 xff0c 对于CMakeLists文件正在了解 xff0c 刚刚接触几个函数 xff0c 但是函数的功能不容易记住 xff0c 创建了这么一个博客 xff0c 后续随着ROS的学习 xff0c
ROS工作空间的文件组成及其功能
catkin workspace 自定义的工作空间 src 放置源码 package1 功能包 xff08 ROS基本单元 xff09 包含多个节点 库与配置文件 xff0c 包含所有字母小写 xff0c 只能由字母 数字与下划线组成 CM
C++ OpenCV cvColor(src, gray_src, CV_BGR2GRAY)未声明的标识符的解决办法
第一种方法 在头文件加上这个引用 xff1a span class token macro property span class token directive hash span span class token directive k
Realsense SR300 获取深度和彩色图像
include lt windows h gt include lt wchar h gt include 34 pxcsensemanager h 34 include 34 util render h 34 SDK provided u
浅谈深度学习
1 绪论 机器学习是一门多领域交叉学科 xff0c 涉及概率论 统计学 逼近论 凸分析 算法复杂度理论等学科 专门研究计算机如何模拟或者实现人类的学习行为 xff0c 来获取新的知识或技能 xff0c 并重组已有的知识结构使之不断改善自身的
使用moveit_setup_assistant生成配置包之后,在功能包内打开终端运行roslaunch demo.launch,报错 RLException: error loading <rosp
使用moveit setup assistant生成配置包之后 xff0c 在功能包内打开终端运行roslaunch demo launch xff0c 报错 RLException error loading tag file does
MoveIt的使用(二)机械臂URDF在ROS中MoveIt的配置和使用
一 机械臂在ros里面的可视化 在SOLIDWORKS转换成urdf文件之后 xff0c 生成的文件放在新建的功能包中后 xff0c 编译 xff08 catkin make xff09 xff0c 再执行下面代码即可运行可视化文件 ros
MoveIt的使用(三)机械臂在rviz中的可视化以及编程控制
在第一篇文章中 xff0c 我们实现了从solidworks到urdf文件的转换 xff0c 第二篇文章 xff0c 主要介绍了MoveIt xff01 Setup Assistant的配置 xff0c 以及机械臂的初步可视化 xff0c
利用OCR识别图像中的英文和文字
一 Tesseract OCR简介 将图片翻译成文字一般称为光学文字识别 xff08 Optical Character Recognition OCR xff09 可以实现OCR的底层并不多 xff0c 目前很多库都是实用共同的几个底层O
[spawn_model-4] process has died [pid 19622, exit code 1, cmd /opt/ros/noetic/lib/gazebo_ros/spawn_m
spawn model 4 process has died pid 19622 exit code 1 cmd opt ros noetic lib gazebo ros spawn model urdf model robot mode
RLException: while processing /home/yzxie/桌面/Autobot_ws/src/it_move_config/launch/move_group.launch:
RLException while processing home yzxie 桌面 Autobot ws src it move config launch move group launch while processing home
[ERROR] [1683095221.962649339]: No p gain specified for pid. Namespace: /Autobot_ws/gazebo_ros_cont
ERROR 1683095221 962649339 No p gain specified for pid Namespace Autobot ws gazebo ros control pid gains joint1 ERROR 16
moveit Exception while loading controller manager ‘simple‘: According to the loaded plugin descripti
span class token punctuation span FATAL span class token punctuation span span class token punctuation span span class t
Dockerfile文件写法
Dockerfile 就得是这个名字 FROM 基于哪个镜像 WORKDIR 接下来运行在哪个目录下 COPY 本地目录 目标目录 ADD 和copy类似 xff0c 但是可以接url xff0c 也会解压 RUN 运行shell语句 容器
换用国内apt源解决树莓派安装ubuntu后apt-get速度慢的问题
最近两代树莓派变化 手里有两块树莓派 一块raspberry pi 3b 购于大四毕业前夕 xff0c 做毕业设计用的 一块raspberry pi 3b 43 公司买来学习研究的 3b 43 和3b相比 xff0c 主要部件变化不大 xf
年前找工作好,还是年后找工作好?求职需警惕,小心陷入羊群效应
不管是年前找工作还是年后找工作 xff0c 好处都各不相同 xff0c 很多人想当然地认为是年后找工作比较好 xff0c 但就我自己的经验来看 xff0c 年前找工作找到好工作的概率其实会更大一些 看问题有时候我们常常容易陷入固有思维 xf
安装docker及常见错误解决
Windows Docker 安装 Win10 系统安装 Hyper V开启 Hyper V 安装 Docker Desktop for Windows运行安装文件如果启动中遇到因 WSL 2 导致地错误 xff0c 请安装 WSL 2 h
Jetson Nano通过HDMI接口显示器设置WIFI及PC端远程登录到机器人
Jetson Nano通过HDMI接口显示器设置WIFI及PC端远程登录到机器人 HDMI接口 xff08 如图 xff09 xff1a 显示器可以利用电脑显示器或者电视屏幕 xff08 这里仅是用于配置网络 xff0c 后期用处不大 xf
Inter RealSense D435i摄像头有驱动但是连接不上
第一步 xff1a 打开电脑设置 xff0c 找到设备和打印界面 xff0c 找到对应连接的是摄像头设备 第二步 xff1a 打开对应的相机设置属性界面 第三步 xff1a 选择硬件属性 第四步 xff1a 点击驱动程序进行点击更新驱动程序
热门标签
mappings
railo
jsonparser
umbraco6
jumplist
formatted
kleisli
msbuild40
springweb
nlb
jdeveloper
xmllibxml
2dgames
raiseevent