1、坐标转换
坐标转换是指坐标系之间的平移以及旋转关系,如坐标系A,B,C。A,B之间存在一个转换关系
T
B
A
T_{B}^{A}
TBA,B与C之间存在转换关系
T
C
B
T_{C}^{B}
TCB,我们知道了B相对于A的关系,C相对于B的转换关系,同样我们可以A,C之间也存在着转换关系
T
C
A
T_{C}^{A}
TCA. 根据两者之间的转换关系可以得到
T
C
A
T_{C}^{A}
TCA=
T
B
A
T_{B}^{A}
TBA *
T
C
B
T_{C}^{B}
TCB.
如图所示

2、lookupTransform获取坐标系之间的转换关系
2.1 lookupTransform
原型:
void Transformer:: lookuptransform (const std::string & target_frame,const std::string & source_frame, const ros::Time & Time, StampedTransform & transform)
- target_frame:目标坐标系,数据应该转到的坐标系
- source_frame:源坐标系,数据来源坐标系
- Time:时间,使用 ros::Time(0),使用ros::time::now()存在问题
- transform:存在转换关系
使用步骤:
- 获取TransformListener监听器
tf::TransformListener* tfListener= new tf::TransformListener;
- 定义StampedTransform保存关系
tf::StampedTransform stfBaseToLink2, stfBaseToLink1, stfLink1ToLink2;
- 使用
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
注意:要使用try…catch进行获取,而且一次可能获取不到。
3、基于lookupTransform证明
T
C
A
T_{C}^{A}
TCA=
T
B
A
T_{B}^{A}
TBA *
T
C
B
T_{C}^{B}
TCB.
- 获取B相对于A的转换关系(
T
B
A
T_{B}^{A}
TBA )
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
- 获取C相对于B转换关系(
T
C
B
T_{C}^{B}
TCB)
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("link1", "link2", ros::Time(0), stfLink1ToLink2);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
- 进行把StampedTransform转换Transform
tf::Transform tfBaseToLink1(tfLink2WrtBaseLink.getBasis(),tfLink2WrtBaseLink.getOrigin())
tf::Transform tfBaseToLink2(stfLink1ToLink2.getBasis(),stfLink1ToLink2.getOrigin())
- 进行
T
B
A
T_{B}^{A}
TBA *
T
C
B
T_{C}^{B}
TCB
altTfBaseToLink2 = tfBaseToLink1*tfLink1ToLink2;
- 获取C相对于A的转换关系(
T
C
A
T_{C}^{A}
TCA)
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("base_link", "link2", ros::Time(0), stfBaseToLink2);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
- 进行把StampedTransform转换Transform
tf::Transform tfBaseToLink2(stfBaseToLink2.getBasis(),stfBaseToLink2.getOrigin())
- 打印结果
全部代码(修改于ROS机器人编程示例)
#include <math.h>
#include <stdlib.h>
#include <string>
#include <vector>
#include <ros/ros.h>
#include <geometry_msgs/Point.h>
#include <geometry_msgs/PointStamped.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_listener.h>
#include <tf/LinearMath/Vector3.h>
#include<iostream>
using namespace std;
void printTf(tf::Transform tf) {
tf::Vector3 tfVec;
tf::Matrix3x3 tfR;
tf::Quaternion quat;
tfVec = tf.getOrigin();
cout<<"vector from reference frame to to child frame: "<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl;
tfR = tf.getBasis();
cout<<"orientation of child frame w/rt reference frame: "<<endl;
tfVec = tfR.getRow(0);
cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl;
tfVec = tfR.getRow(1);
cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl;
tfVec = tfR.getRow(2);
cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl;
quat = tf.getRotation();
cout<<"quaternion: " <<quat.x()<<", "<<quat.y()<<", "
<<quat.z()<<", "<<quat.w()<<endl;
}
tf::Transform get_tf_from_stamped_tf(tf::StampedTransform sTf) {
tf::Transform tf(sTf.getBasis(),sTf.getOrigin());
return tf;
}
void printStampedTf(tf::StampedTransform sTf){
tf::Transform tf;
cout<<"frame_id: "<<sTf.frame_id_<<endl;
cout<<"child_frame_id: "<<sTf.child_frame_id_<<endl;
tf = get_tf_from_stamped_tf(sTf);
printTf(tf);
}
void printStampedPose(geometry_msgs::PoseStamped stPose){
cout<<"frame id = "<<stPose.header.frame_id<<endl;
cout<<"origin: "<<stPose.pose.position.x<<", "<<stPose.pose.position.y<<", "<<stPose.pose.position.z<<endl;
cout<<"quaternion: "<<stPose.pose.orientation.x<<", "<<stPose.pose.orientation.y<<", "
<<stPose.pose.orientation.z<<", "<<stPose.pose.orientation.w<<endl;
}
int main(int argc, char * argv[])
{
ros::init(argc, argv, "listentext");
ros::NodeHandle nh;
tf::TransformListener* tfListener= new tf::TransformListener;
tf::StampedTransform stfBaseToLink2, stfBaseToLink1, stfLink1ToLink2;
tf::StampedTransform testStfBaseToLink2;
tf::Transform tfBaseToLink1, tfLink1ToLink2, tfBaseToLink2, altTfBaseToLink2;
bool tferr=true;
ROS_INFO("waiting for tf between link2 and base_link...");
tf::StampedTransform tfLink2WrtBaseLink;
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
tfBaseToLink1 = get_tf_from_stamped_tf(tfLink2WrtBaseLink);
tferr = true;
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("link1", "link2", ros::Time(0), stfLink1ToLink2);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
tfLink1ToLink2 = get_tf_from_stamped_tf(stfLink1ToLink2);
tferr = true;
while (tferr) {
tferr=false;
try {
tfListener->lookupTransform("base_link", "link2", ros::Time(0), stfBaseToLink2);
} catch(tf::TransformException &exception) {
ROS_WARN("%s; retrying...", exception.what());
tferr=true;
ros::Duration(0.5).sleep();
continue;
}
}
printStampedTf(stfBaseToLink2);
tfBaseToLink2 = get_tf_from_stamped_tf(stfBaseToLink2);
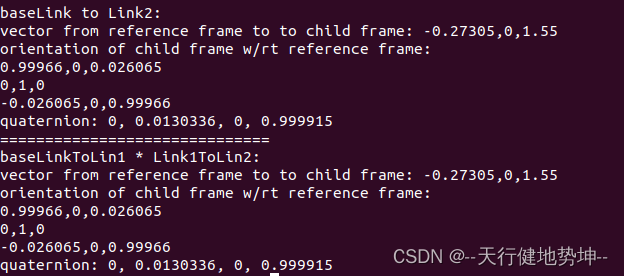
cout << endl << "baseLink to Link2:" << endl;
printTf(tfBaseToLink2);
cout<<"==============================";
altTfBaseToLink2 = tfBaseToLink1*tfLink1ToLink2;
cout << endl << "baseLinkToLin1 * Link1ToLin2: " << endl;
printTf(altTfBaseToLink2);
return 0;
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)