原文链接: 零偏,零偏稳定性和零偏重复性,IMU误差模型
什么是零偏(Bias)
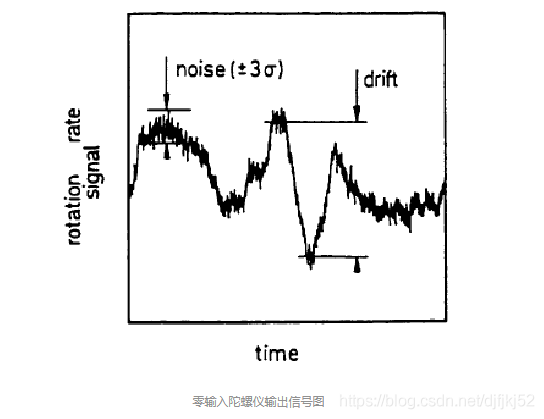
在陀螺静止时,陀螺仪仍会,以规定时间内测得的输出量平均值相应的等效输入角速率表示,单位为°/h,°/s。理想状态下该数值应为地球自转角速度的分量。在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的平均值就是零偏值。
什么是零漂或零偏稳定性(Bias Stability)
是衡量陀螺仪精度的重要指标之一。表示当输入角速率为零时,衡量陀螺仪输出量围绕其均值(零偏)的离散程度。可以规定时间内输出量的标准偏差相应的等效输入角速率表示,也可称为零漂。单位为°/h,°/s。
计算陀螺零偏稳定性的方法是采集一段数据,去除趋势项,再计算均方差。那么显然采样时间越长,意味着平滑的数据长度长,得到的零偏稳定性数值也就越好。 因此在评估精度时,采样时间也是要考量的参数之一。

截至目前,开拓导控旗下Mems陀螺仪精度可达到零偏稳定性(1s平滑,1σ,室温)0.5°/h,代表国产mems陀螺精度先进水平,自主可控。
零偏重复性(Bias Repeatability)
是指在同样条件下及规定时间间隔内,重复测量陀螺零偏之间的一致程度,以各次测试得到的零偏的标准差表示。单位为°/h,°/s。
IMU误差模型
这篇文章主要讨论 IMU 中陀螺仪和加速度计的随机误差。现在市场中的 IMU 中基本都包含磁强计,但在日常应用中磁强计的主要误差来源是环境中的磁场干扰,而传感器本身的误差基本可以忽略不计,因此磁强计在 IMU 姿态估计中的使用是一个非常不同的话题,在这篇文章中不予讨论。此外,在惯性导航中,陀螺仪和加速度计的信号都需要积分,而积分往往会积累误差,因此这两者的误差模型就显得更重要一些。
陀螺仪和加速度计的系统误差
所谓系统误差是指非随机误差,可以通过传感器的校准消除。陀螺仪和加速度计的系统误差一般包含以下几种:开机后恒定的零偏误差(bias),比例因子误差(scale factor),不重合及非正交误差(misalignment and non-orthogonality),非线性误差(non-linearity),温度误差(thermal noise)。其中陀螺仪还包含加速度的变化引起的误差(g-dependent noise)[1]。因此包含系统误差的角速度可以写为以下的表达式:

通常比较好的 IMU 在芯片中已经做了零偏误差,比例因子误差,不重合及非正交误差,和温度引起的误差的补偿;而且零偏误差可以通过在开机后静止一段时间比较准确地测量。加速度计的系统误差和陀螺仪类似,只是不包含加速度引起的误差 Bat.
在卡尔曼滤波器中,我们一般都假设测量的信号不包含系统误差,但这是不可能的!不过在之后文章我们会谈到,卡尔曼滤波器最终会趋向于线性互补滤波器,因此卡尔曼滤波器在有系统误差的情况下长期表现至少和互补滤波器一样好。另外,我们可以用卡尔曼滤波器同时估计 IMU 的姿态和一些系统误差参数,例如一般使用的 IMU 姿态估计算法都会包含对零偏误差的估计。
2. 陀螺仪和加速度计的随机误差-随机行走
陀螺仪的随机误差一般包含两项:随机行走误差(random walk)及零偏不稳定性(bias instability)。

先谈随机行走误差:
- 相对于陀螺仪,这项误差的效果是积分得到的角度的误差是维纳过程(随机行走是维纳过程的时间离散化);
- 相对于加速度计,这项误差是指积分得到的速度的误差是维纳过程。
- 维纳过程可以不严格地理解为高斯白噪声的积分,因此这项误差翻译成我们熟悉的语言就是:陀螺仪测量的角速度,加速度计测量的加速度的噪声是高斯白噪声。
3. 陀螺仪和加速度计的随机误差-零偏不稳定性
4. 陀螺仪的和加速度计的随机误差模型
在文献中(例如 [4]),大家可能经常看到陀螺仪的误差模型被写为以下的式子:

5. 随机误差的测量方法-艾伦方差(Allan Variance)
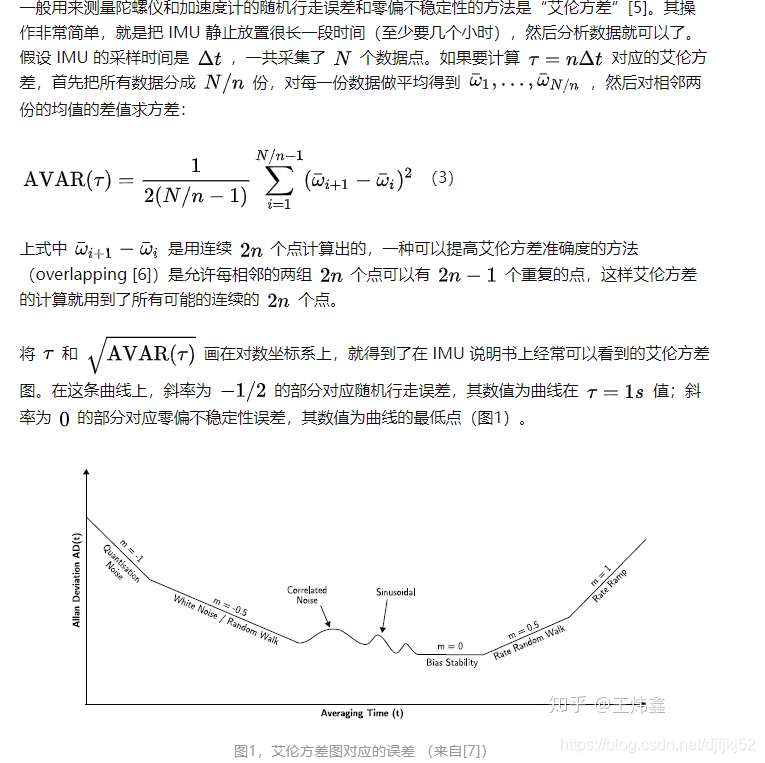
一般用来测量陀螺仪和加速度计的随机行走误差和零偏不稳定性的方法是“艾伦方差”[5]。其操作非常简单,就是把 IMU 静止放置很长一段时间(至少要几个小时),然后分析数据就可以了。
6. 总结
这篇文章介绍了 IMU 中陀螺仪和加速度计的系统误差和随机误差。其中系统误差可以通过传感器的校准消除。随机误差主要包含随机行走误差和零偏不稳定性误差,其中随机行走误差可以理解为传感器的高斯白噪声,零偏不稳定性误差表现为传感器的零偏会随时间逐渐变化。一般文献中的 IMU 随机误差模型是高斯白噪声和维纳过程的叠加。最后,IMU 的随机误差的参数可以通过艾伦方法测量。在卡尔曼滤波器中,我们需要使用 IMU 的误差模型来计算状态变量的方差随时间的变化。
参考文献
[1] Grewal, Mohinder, and Angus Andrews. "How good is your gyro [ask the experts]."IEEE Control Systems Magazine30.1 (2010): 12-86.
[2] Keshner, Marvin S. "1/f noise."Proceedings of the IEEE70.3 (1982): 212-218.
[3] Woodman, Oliver J.An introduction to inertial navigation. No. UCAM-CL-TR-696. University of Cambridge, Computer Laboratory, 2007.
[4] Trawny, Nikolas, and Stergios I. Roumeliotis. "Indirect Kalman filter for 3D attitude estimation."University of Minnesota, Dept. of Comp. Sci. & Eng., Tech. Rep2 (2005): 2005.
[5] El-Sheimy, Naser, Haiying Hou, and Xiaoji Niu. "Analysis and modeling of inertial sensors using Allan variance."IEEE Transactions on instrumentation and measurement57.1 (2007): 140-149.
[6] Riley, William J. “Handbook of frequency stability analysis.” (2008): 81.
[7] IEEE Std 962-1997 (R2003) Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros, Annex C. IEEE, 2003.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)