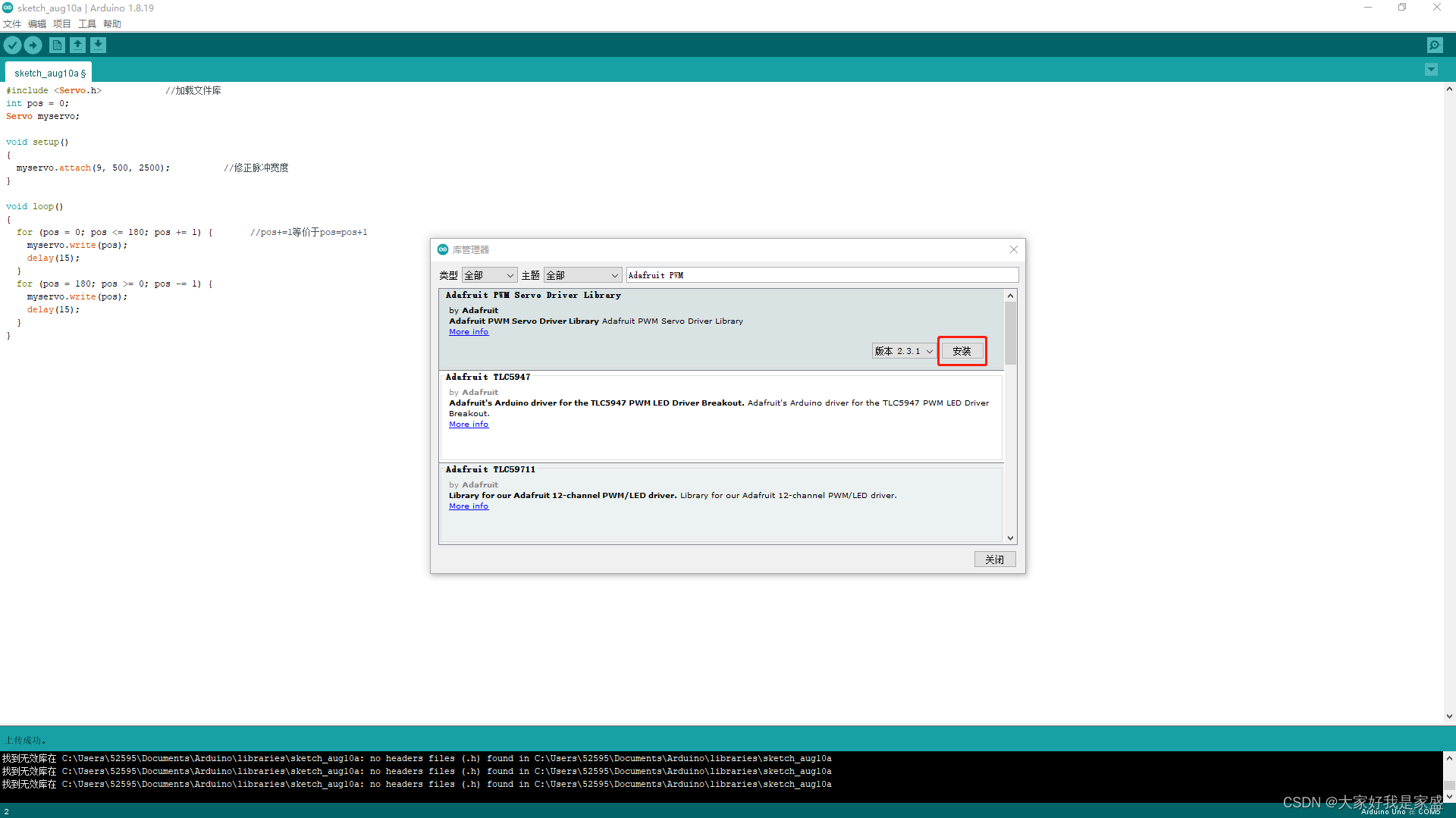
//Michael Klements//The DIY Life//3 May 2020#include<Adafruit_PWMServoDriver.h>//Include the PWM Driver library
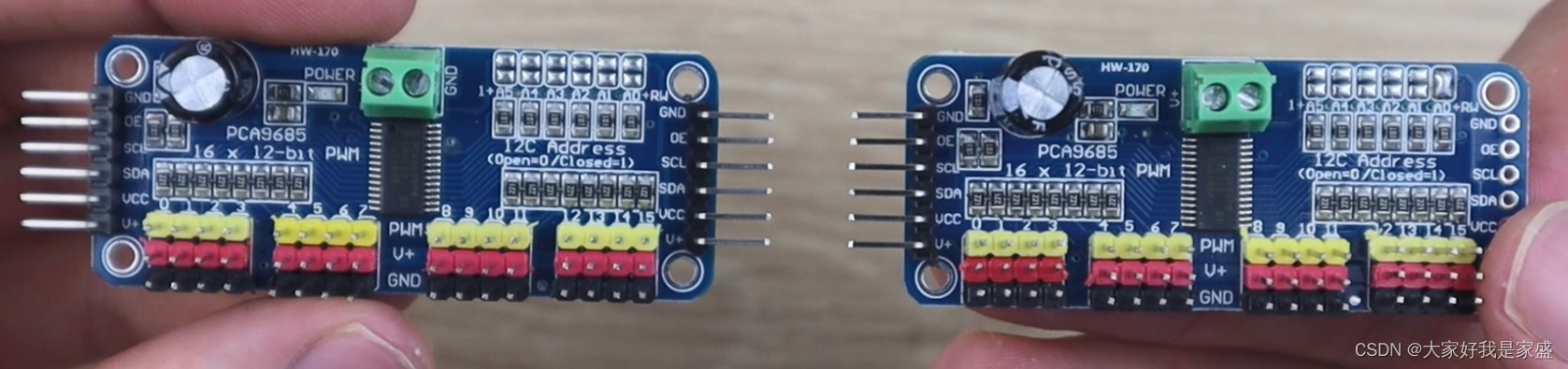
Adafruit_PWMServoDriver pwm1 =Adafruit_PWMServoDriver(0x40);//Create an object of board 1
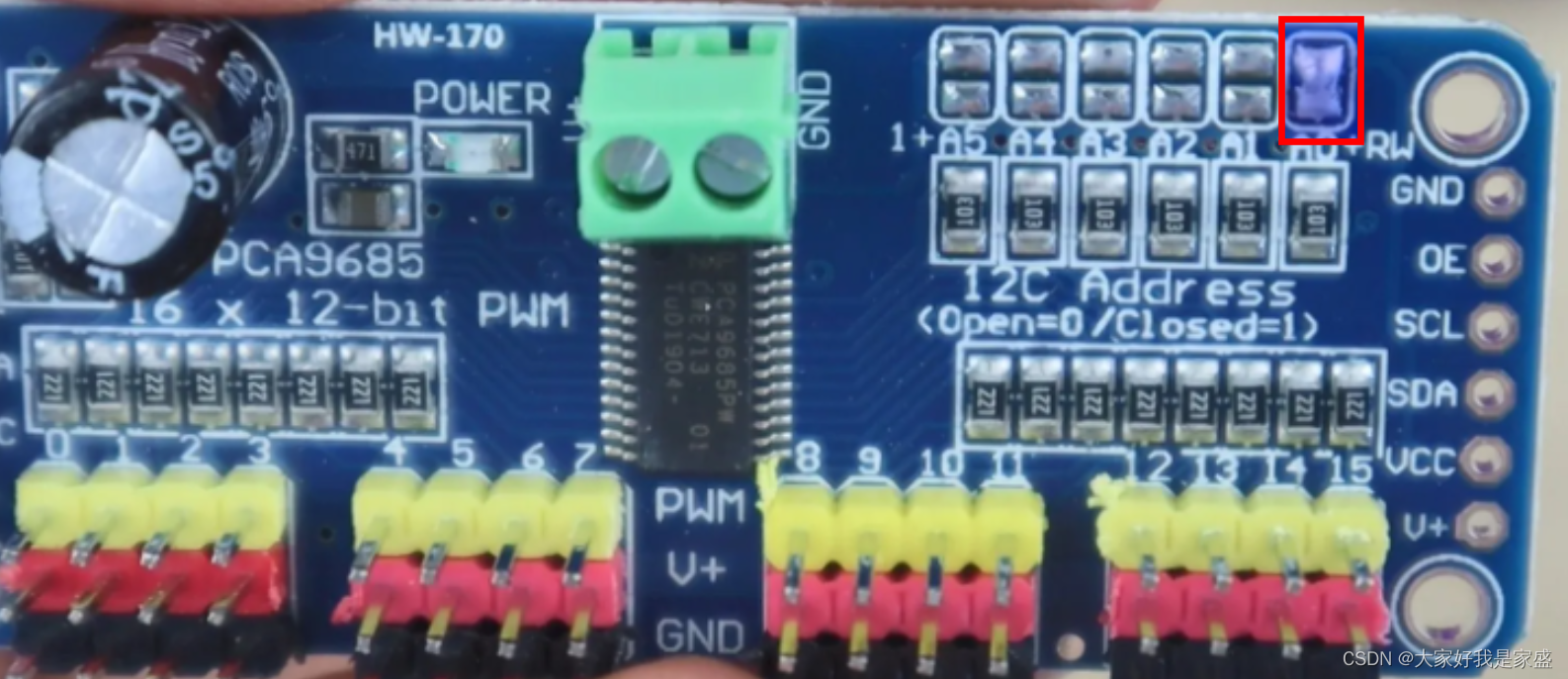
Adafruit_PWMServoDriver pwm2 =Adafruit_PWMServoDriver(0x41);//Create an object of board 2 (A0 Address Jumper)int servoMin =150;// This is the servos minimum pulse length count (out of 4096)int servoMax =600;// This is the servos maximum pulse length count (out of 4096)int servoFrequency =50;// Servo update frequency, analog servos typically run at ~50 Hzvoidsetup(){
pwm1.begin();//Start each board
pwm2.begin();
pwm1.setOscillatorFrequency(27000000);//Set the PWM oscillator frequency, used for fine calibration
pwm2.setOscillatorFrequency(27000000);
pwm1.setPWMFreq(servoFrequency);//Set the servo operating frequency
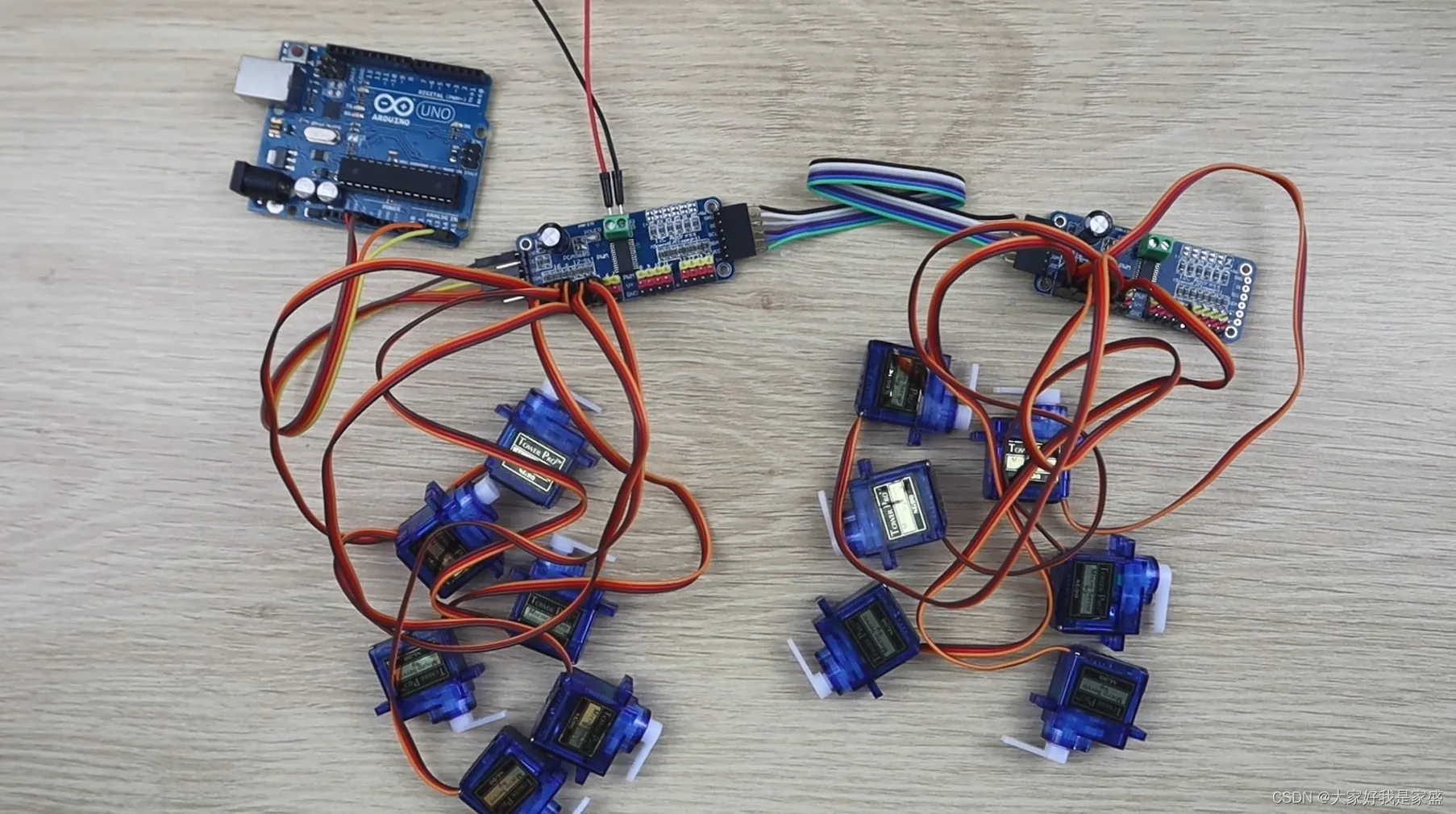
pwm2.setPWMFreq(servoFrequency);}voidloop(){for(int i=0; i<=5; i++)//Cycle through moving 6 servos on each board{for(int pulseLength = servoMin ; pulseLength <= servoMax ; pulseLength++)//Move each servo from servoMin to servoMax{
pwm1.setPWM(i,0, pulseLength);//Set the current PWM pulse length on board 1, servo i
pwm2.setPWM(i,0, pulseLength);//Set the current PWM pulse length on board 2, servo idelay(1);}delay(100);for(int pulseLength = servoMax ; pulseLength >= servoMin ; pulseLength--)Move each servo from servoMax to servoMin{
pwm1.setPWM(i,0, pulseLength);//Set the current PWM pulse length on board 1, servo i
pwm2.setPWM(i,0, pulseLength);//Set the current PWM pulse length on board 2, servo idelay(1);}delay(100);}delay(500);}