引言
关于ZED相机的安装和配置可以先参考【ZED】从零开始使用ZED相机(一):windows下的安装配置与测试
关于ZED相机的基本使用可以参考【ZED】从零开始使用ZED相机(二):打开相机+捕获图像
接下来介绍基于ZED相机的SDK实现相机的标定,标定的原理基于张氏标定法,算法这里不单独介绍,推荐讲解的链接立体视觉入门指南(3):相机标定之张式标定法【超详细值得收藏】
1 获取棋盘格图像
首先打印棋盘格图案,笔者打印的是7x9的棋盘格,内角点数为6x8
笔者将ZED可能调用的函数封装成一个类,初始化ZED相机以及自定义捕获图像的函数,代码如下:
import pyzed.sl as sl
import cv2
import numpy as np
import os
class CameraZed2:
def __init__(self,resolution=None,fps=30,depthMode = None):
self.zed = sl.Camera()
self.input_type = sl.InputType()
self.init_params = sl.InitParameters(input_t=self.input_type)
if resolution == "2K":
self.init_params.camera_resolution = sl.RESOLUTION.HD2K
elif resolution == "1080":
self.init_params.camera_resolution = sl.RESOLUTION.HD1080
else:
self.init_params.camera_resolution = sl.RESOLUTION.HD720
self.init_params.camera_fps = fps
if depthMode == "PERFORMANCE":
self.init_params.depth_mode = sl.DEPTH_MODE.PERFORMANCE
elif depthMode == "QUALITY":
self.init_params.depth_mode = sl.DEPTH_MODE.QUALITY
else:
self.init_params.depth_mode = sl.DEPTH_MODE.ULTRA
self.init_params.coordinate_units = sl.UNIT.MILLIMETER
err = self.zed.open(self.init_params)
if err != sl.ERROR_CODE.SUCCESS:
print(repr(err))
self.zed.close()
exit(1)
self.runtime = sl.RuntimeParameters()
self.runtime.sensing_mode = sl.SENSING_MODE.STANDARD
self.savepath = ''
def grab_imgs(self):
img_l = sl.Mat()
img_r = sl.Mat()
num = 0
import time
name = time.strftime("%Y-%m-%d-%H-%M", time.localtime())
self.savepath = './images/%s'% name
if not os.path.exists(savepath):
os.mkdir(savepath)
while True:
if self.zed.grab(self.runtime) == sl.ERROR_CODE.SUCCESS:
self.zed.retrieve_image(img_l,sl.VIEW.LEFT)
self.img_l = img_l.get_data()
self.zed.retrieve_image(img_r,sl.VIEW.RIGHT)
self.img_r = img_r.get_data()
view = np.concatenate((self.img_l,self.img_r),axis=1)
cv2.imshow('View',cv2.resize(view,(1920,540)))
key = cv2.waitKey(1)
if key & 0xFF == ord('s'):
savePath = os.path.join(self.savepath, "L{:0>3d}.png".format(num))
cv2.imwrite(savePath, self.img_l)
num +=1
if key & 0xFF == 27:
break
调用类
if __name__ == "__main__":
cam = CameraZed2(resolution='1080',fps=30)
cam.grab_imgs()
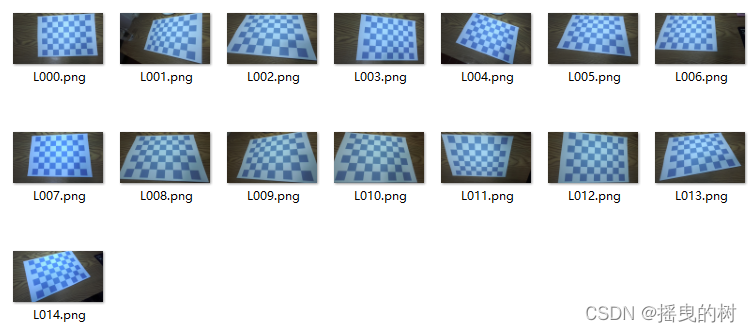
获取的棋盘格图像如下:
2 相机标定(单目)
继续在上述的类中定义相机标定函数
新增的函数定义如下:
def calibrate(self,pic_points,real_points_x_y,real_points):
from step.homography import get_homography
from step.intrinsics import get_intrinsics_param
from step.extrinsics import get_extrinsics_param
from step.distortion import get_distortion
from step.refine_all import refinall_all_param
H = get_homography(pic_points, real_points_x_y)
intrinsics_param = get_intrinsics_param(H)
extrinsics_param = get_extrinsics_param(H, intrinsics_param)
k = get_distortion(intrinsics_param, extrinsics_param, pic_points, real_points_x_y)
[new_intrinsics_param, new_k, new_extrinsics_param] = refinall_all_param(intrinsics_param,
k, extrinsics_param, real_points,
pic_points)
print("Homographic矩阵:\n",H)
print("内参矩阵:\n", new_intrinsics_param)
print("畸变校正系数:\n", new_k)
print("外参矩阵:\n", new_extrinsics_param)
def cal_exe(self):
file_dir = r'./images'
pic_name = os.listdir(file_dir)
cross_corners = [6, 8]
real_coor = np.zeros((cross_corners[0] * cross_corners[1], 3), np.float32)
real_coor[:, :2] = np.mgrid[0:6, 0:8].T.reshape(-1, 2)
real_points = []
real_points_x_y = []
pic_points = []
for pic in pic_name:
pic_path = os.path.join(file_dir, pic)
pic_data = cv2.imread(pic_path)
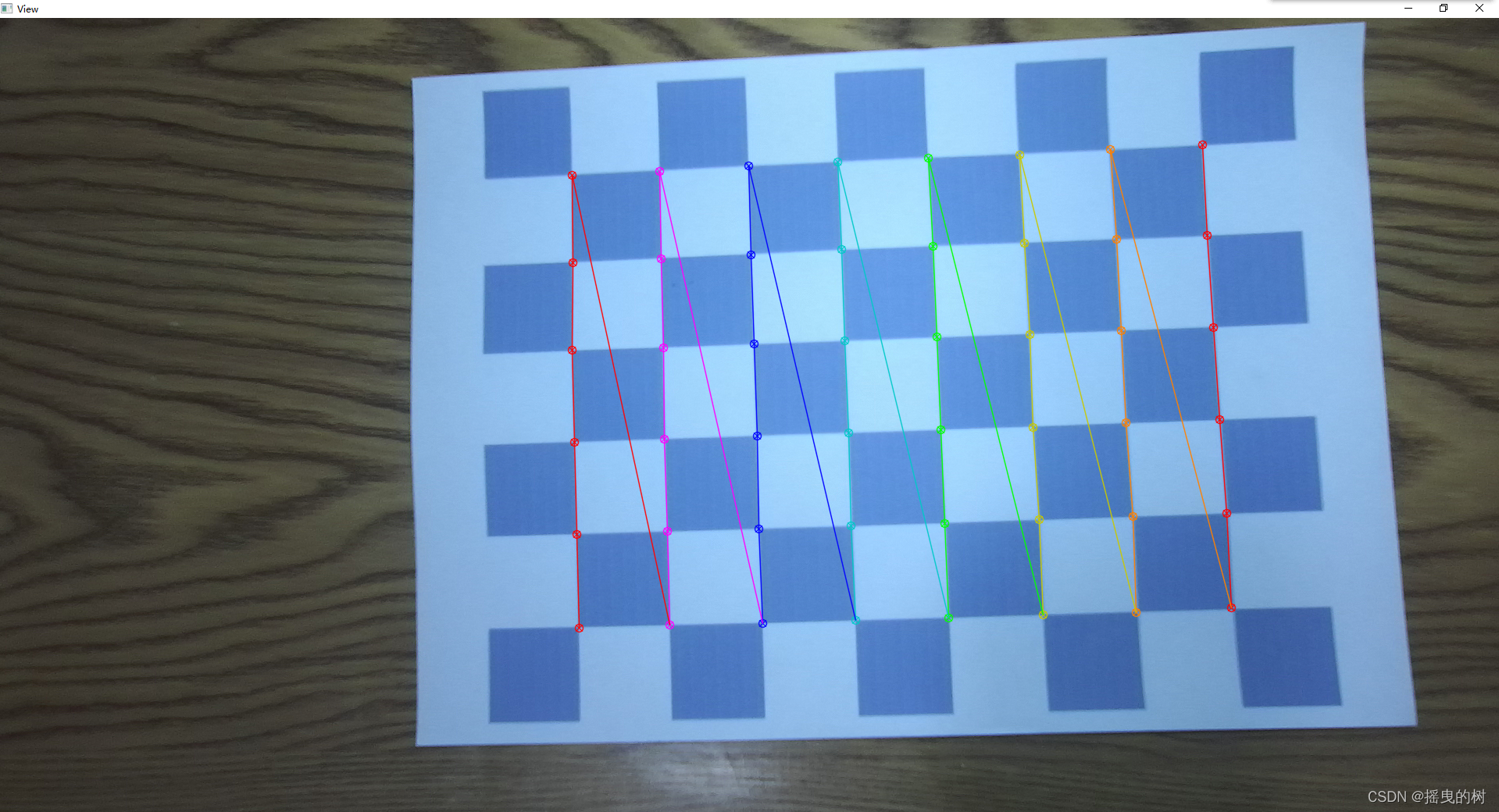
succ, pic_coor = cv2.findChessboardCorners(pic_data, (cross_corners[0], cross_corners[1]), None)
cv2.drawChessboardCorners(pic_data, (cross_corners[0], cross_corners[1]), pic_coor, succ)
cv2.namedWindow('View')
cv2.imshow("View", pic_data)
cv2.waitKey(0)
cv2.destroyAllWindows()
if succ:
pic_coor = pic_coor.reshape(-1, 2)
pic_points.append(pic_coor)
real_points.append(real_coor)
real_points_x_y.append(real_coor[:, :2])
self.calibrate(pic_points,real_points_x_y,real_points)
上述代码中导入的文件有:
在该代码的同根目录下新建文件夹step,在文件夹中放入如下文件:
1 distortion.py求解畸变矫正系数
2 extrinsics.py求解外参矩阵
3 homography.py 求解单应性矩阵
4 intrinsics.py求解内参矩阵
5 refine_all微调参数
2.1 distortion.py求解畸变矫正系数
"""
2022.2.2
author:alian
distortion.py求解畸变矫正系数
"""
import numpy as np
def get_distortion(intrinsic_param, extrinsic_param, pic_coor, real_coor):
D = []
d = []
for i in range(len(pic_coor)):
for j in range(len(pic_coor[i])):
single_coor = np.array([(real_coor[i])[j, 0], (real_coor[i])[j, 1], 0, 1])
u = np.dot(np.dot(intrinsic_param, extrinsic_param[i]), single_coor)
[u_estim, v_estim] = [u[0] / u[2], u[1] / u[2]]
coor_norm = np.dot(extrinsic_param[i], single_coor)
coor_norm /= coor_norm[-1]
r = np.linalg.norm(coor_norm)
D.append(np.array([(u_estim - intrinsic_param[0, 2]) * r ** 2, (u_estim - intrinsic_param[0, 2]) * r ** 4]))
D.append(np.array([(v_estim - intrinsic_param[1, 2]) * r ** 2, (v_estim - intrinsic_param[1, 2]) * r ** 4]))
d.append(pic_coor[i][j, 0] - u_estim)
d.append(pic_coor[i][j, 1] - v_estim)
'''
D.append(np.array([(pic_coor[i][j, 0] - intrinsic_param[0, 2]) * r ** 2, (pic_coor[i][j, 0] - intrinsic_param[0, 2]) * r ** 4]))
D.append(np.array([(pic_coor[i][j, 1] - intrinsic_param[1, 2]) * r ** 2, (pic_coor[i][j, 1] - intrinsic_param[1, 2]) * r ** 4]))
#求出估计坐标与真实坐标的残差
d.append(u_estim - pic_coor[i][j, 0])
d.append(v_estim - pic_coor[i][j, 1])
'''
D = np.array(D)
temp = np.dot(np.linalg.inv(np.dot(D.T, D)), D.T)
k = np.dot(temp, d)
'''
#也可利用SVD求解D * k = d中的k
U, S, Vh=np.linalg.svd(D, full_matrices=False)
temp_S = np.array([[S[0], 0],
[0, S[1]]])
temp_res = np.dot(Vh.transpose(), np.linalg.inv(temp_S))
temp_res_res = np.dot(temp_res, U.transpose())
k = np.dot(temp_res_res, d)
'''
return k
2.2 extrinsics.py求解外参矩阵
"""
2022.2.2
author:alian
extrinsics.py求解外参矩阵
"""
import numpy as np
def get_extrinsics_param(H, intrinsics_param):
extrinsics_param = []
inv_intrinsics_param = np.linalg.inv(intrinsics_param)
for i in range(len(H)):
h0 = (H[i].reshape(3, 3))[:, 0]
h1 = (H[i].reshape(3, 3))[:, 1]
h2 = (H[i].reshape(3, 3))[:, 2]
scale_factor = 1 / np.linalg.norm(np.dot(inv_intrinsics_param, h0))
r0 = scale_factor * np.dot(inv_intrinsics_param, h0)
r1 = scale_factor * np.dot(inv_intrinsics_param, h1)
t = scale_factor * np.dot(inv_intrinsics_param, h2)
r2 = np.cross(r0, r1)
R = np.array([r0, r1, r2, t]).transpose()
extrinsics_param.append(R)
return extrinsics_param
2.3 homography.py 求解单应性矩阵
"""
2022.2.2
author:alian
homography.py 求解单应性矩阵
"""
import numpy as np
from scipy import optimize as opt
def normalizing_input_data(coor_data):
x_avg = np.mean(coor_data[:, 0])
y_avg = np.mean(coor_data[:, 1])
sx = np.sqrt(2) / np.std(coor_data[:, 0])
sy = np.sqrt(2) / np.std(coor_data[:, 1])
norm_matrix = np.matrix([[sx, 0, -sx * x_avg],
[0, sy, -sy * y_avg],
[0, 0, 1]])
return norm_matrix
def get_initial_H(pic_coor, real_coor):
pic_norm_mat = normalizing_input_data(pic_coor)
real_norm_mat = normalizing_input_data(real_coor)
M = []
for i in range(len(pic_coor)):
single_pic_coor = np.array([pic_coor[i][0], pic_coor[i][1], 1])
single_real_coor = np.array([real_coor[i][0], real_coor[i][1], 1])
pic_norm = np.dot(pic_norm_mat, single_pic_coor)
real_norm = np.dot(real_norm_mat, single_real_coor)
M.append(np.array([-real_norm.item(0), -real_norm.item(1), -1,
0, 0, 0,
pic_norm.item(0) * real_norm.item(0), pic_norm.item(0) * real_norm.item(1), pic_norm.item(0)]))
M.append(np.array([0, 0, 0,
-real_norm.item(0), -real_norm.item(1), -1,
pic_norm.item(1) * real_norm.item(0), pic_norm.item(1) * real_norm.item(1), pic_norm.item(1)]))
U, S, VT = np.linalg.svd((np.array(M, dtype='float')).reshape((-1, 9)))
H = VT[-1].reshape((3, 3))
H = np.dot(np.dot(np.linalg.inv(pic_norm_mat), H), real_norm_mat)
H /= H[-1, -1]
return H
def value(H, pic_coor, real_coor):
Y = np.array([])
for i in range(len(real_coor)):
single_real_coor = np.array([real_coor[i, 0], real_coor[i, 1], 1])
U = np.dot(H.reshape(3, 3), single_real_coor)
U /= U[-1]
Y = np.append(Y, U[:2])
Y_NEW = (pic_coor.reshape(-1) - Y)
return Y_NEW
def jacobian(H, pic_coor, real_coor):
J = []
for i in range(len(real_coor)):
sx = H[0]*real_coor[i][0] + H[1]*real_coor[i][1] +H[2]
sy = H[3]*real_coor[i][0] + H[4]*real_coor[i][1] +H[5]
w = H[6]*real_coor[i][0] + H[7]*real_coor[i][1] +H[8]
w2 = w * w
J.append(np.array([real_coor[i][0]/w, real_coor[i][1]/w, 1/w,
0, 0, 0,
-sx*real_coor[i][0]/w2, -sx*real_coor[i][1]/w2, -sx/w2]))
J.append(np.array([0, 0, 0,
real_coor[i][0]/w, real_coor[i][1]/w, 1/w,
-sy*real_coor[i][0]/w2, -sy*real_coor[i][1]/w2, -sy/w2]))
return np.array(J)
def refine_H(pic_coor, real_coor, initial_H):
initial_H = np.array(initial_H)
final_H = opt.leastsq(value,
initial_H,
Dfun=jacobian,
args=(pic_coor, real_coor))[0]
final_H /= np.array(final_H[-1])
return final_H
def get_homography(pic_coor, real_coor):
refined_homographies =[]
error = []
for i in range(len(pic_coor)):
initial_H = get_initial_H(pic_coor[i], real_coor[i])
final_H = refine_H(pic_coor[i], real_coor[i], initial_H)
refined_homographies.append(final_H)
return np.array(refined_homographies)
2.4 intrinsics.py求解内参矩阵
"""
2022.2.2
author:alian
intrinsics.py求解内参矩阵
"""
import numpy as np
def create_v(p, q, H):
H = H.reshape(3, 3)
return np.array([
H[0, p] * H[0, q],
H[0, p] * H[1, q] + H[1, p] * H[0, q],
H[1, p] * H[1, q],
H[2, p] * H[0, q] + H[0, p] * H[2, q],
H[2, p] * H[1, q] + H[1, p] * H[2, q],
H[2, p] * H[2, q]
])
def get_intrinsics_param(H):
V = np.array([])
for i in range(len(H)):
V = np.append(V, np.array([create_v(0, 1, H[i]), create_v(0, 0 , H[i])- create_v(1, 1 , H[i])]))
U, S, VT = np.linalg.svd((np.array(V, dtype='float')).reshape((-1, 6)))
b = VT[-1]
w = b[0] * b[2] * b[5] - b[1] * b[1] * b[5] - b[0] * b[4] * b[4] + 2 * b[1] * b[3] * b[4] - b[2] * b[3] * b[3]
d = b[0] * b[2] - b[1] * b[1]
alpha = np.sqrt(w / (d * b[0]))
beta = np.sqrt(w / d**2 * b[0])
gamma = np.sqrt(w / (d**2 * b[0])) * b[1]
uc = (b[1] * b[4] - b[2] * b[3]) / d
vc = (b[1] * b[3] - b[0] * b[4]) / d
return np.array([
[alpha, gamma, uc],
[0, beta, vc],
[0, 0, 1]
])
2.5 refine_all微调参数
"""
2022.2.2
author:alian
refine_all微调参数
"""
import numpy as np
import math
from scipy import optimize as opt
def refinall_all_param(A, k, W, real_coor, pic_coor):
P_init = compose_paramter_vector(A, k, W)
X_double = np.zeros((2 * len(real_coor) * len(real_coor[0]), 3))
Y = np.zeros((2 * len(real_coor) * len(real_coor[0])))
M = len(real_coor)
N = len(real_coor[0])
for i in range(M):
for j in range(N):
X_double[(i * N + j) * 2] = (real_coor[i])[j]
X_double[(i * N + j) * 2 + 1] = (real_coor[i])[j]
Y[(i * N + j) * 2] = (pic_coor[i])[j, 0]
Y[(i * N + j) * 2 + 1] = (pic_coor[i])[j, 1]
P = opt.leastsq(value,
P_init,
args=(W, real_coor, pic_coor),
Dfun=jacobian)[0]
error = value(P, W, real_coor, pic_coor)
raial_error = [np.sqrt(error[2 * i]**2 + error[2 * i + 1]**2) for i in range(len(error) // 2)]
print("total max error:\t", np.max(raial_error))
return decompose_paramter_vector(P)
def compose_paramter_vector(A, k, W):
alpha = np.array([A[0, 0], A[1, 1], A[0, 1], A[0, 2], A[1, 2], k[0], k[1]])
P = alpha
for i in range(len(W)):
R, t = (W[i])[:, :3], (W[i])[:, 3]
zrou = to_rodrigues_vector(R)
w = np.append(zrou, t)
P = np.append(P, w)
return P
def decompose_paramter_vector(P):
[alpha, beta, gamma, uc, vc, k0, k1] = P[0:7]
A = np.array([[alpha, gamma, uc],
[0, beta, vc],
[0, 0, 1]])
k = np.array([k0, k1])
W = []
M = (len(P) - 7) // 6
for i in range(M):
m = 7 + 6 * i
zrou = P[m:m+3]
t = (P[m+3:m+6]).reshape(3, -1)
R = to_rotation_matrix(zrou)
w = np.concatenate((R, t), axis=1)
W.append(w)
W = np.array(W)
return A, k, W
def get_single_project_coor(A, W, k, coor):
single_coor = np.array([coor[0], coor[1], coor[2], 1])
coor_norm = np.dot(W, single_coor)
coor_norm /= coor_norm[-1]
r = np.linalg.norm(coor_norm)
uv = np.dot(np.dot(A, W), single_coor)
uv /= uv[-1]
u0 = uv[0]
v0 = uv[1]
uc = A[0, 2]
vc = A[1, 2]
u = u0 + (u0 - uc) * r**2 * k[0] + (u0 - uc) * r**4 * k[1]
v = v0 + (v0 - vc) * r**2 * k[0] + (v0 - vc) * r**4 * k[1]
'''
uv = np.dot(W, single_coor)
uv /= uv[-1]
# 透镜矫正
x0 = uv[0]
y0 = uv[1]
r = np.linalg.norm(np.array([x0, y0]))
k0 = 0
k1 = 0
x = x0 * (1 + r ** 2 * k0 + r ** 4 * k1)
y = y0 * (1 + r ** 2 * k0 + r ** 4 * k1)
#u = A[0, 0] * x + A[0, 2]
#v = A[1, 1] * y + A[1, 2]
[u, v, _] = np.dot(A, np.array([x, y, 1]))
'''
return np.array([u, v])
def value(P, org_W, X, Y_real):
M = (len(P) - 7) // 6
N = len(X[0])
A = np.array([
[P[0], P[2], P[3]],
[0, P[1], P[4]],
[0, 0, 1]
])
Y = np.array([])
for i in range(M):
m = 7 + 6 * i
w = P[m:m + 6]
'''
R = to_rotation_matrix(w[:3])
t = w[3:].reshape(3, 1)
W = np.concatenate((R, t), axis=1)
'''
W = org_W[i]
for j in range(N):
Y = np.append(Y, get_single_project_coor(A, W, np.array([P[5], P[6]]), (X[i])[j]))
error_Y = np.array(Y_real).reshape(-1) - Y
return error_Y
def jacobian(P, WW, X, Y_real):
M = (len(P) - 7) // 6
N = len(X[0])
K = len(P)
A = np.array([
[P[0], P[2], P[3]],
[0, P[1], P[4]],
[0, 0, 1]
])
res = np.array([])
for i in range(M):
m = 7 + 6 * i
w = P[m:m + 6]
R = to_rotation_matrix(w[:3])
t = w[3:].reshape(3, 1)
W = np.concatenate((R, t), axis=1)
for j in range(N):
res = np.append(res, get_single_project_coor(A, W, np.array([P[5], P[6]]), (X[i])[j]))
J = np.zeros((K, 2 * M * N))
for k in range(K):
J[k] = np.gradient(res, P[k])
return J.T
def to_rodrigues_vector(R):
p = 0.5 * np.array([[R[2, 1] - R[1, 2]],
[R[0, 2] - R[2, 0]],
[R[1, 0] - R[0, 1]]])
c = 0.5 * (np.trace(R) - 1)
if np.linalg.norm(p) == 0:
if c == 1:
zrou = np.array([0, 0, 0])
elif c == -1:
R_plus = R + np.eye(3, dtype='float')
norm_array = np.array([np.linalg.norm(R_plus[:, 0]),
np.linalg.norm(R_plus[:, 1]),
np.linalg.norm(R_plus[:, 2])])
v = R_plus[:, np.where(norm_array == max(norm_array))]
u = v / np.linalg.norm(v)
if u[0] < 0 or (u[0] == 0 and u[1] < 0) or (u[0] == u[1] and u[0] == 0 and u[2] < 0):
u = -u
zrou = math.pi * u
else:
zrou = []
else:
u = p / np.linalg.norm(p)
theata = math.atan2(np.linalg.norm(p), c)
zrou = theata * u
return zrou
def to_rotation_matrix(zrou):
theta = np.linalg.norm(zrou)
zrou_prime = zrou / theta
W = np.array([[0, -zrou_prime[2], zrou_prime[1]],
[zrou_prime[2], 0, -zrou_prime[0]],
[-zrou_prime[1], zrou_prime[0], 0]])
R = np.eye(3, dtype='float') + W * math.sin(theta) + np.dot(W, W) * (1 - math.cos(theta))
return R

函数调用如下:
if __name__ == "__main__":
cam = CameraZed2(resolution='1080',fps=30)
cam.cal_exe()
结果如下:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)