前言
中汽协预计,2023年中国 汽车市场总销量为2760万辆,同比增长3%。其中,国内乘用车累计销量预计为2380万辆,同比增长1.3%;商用车累计销量预计为380万辆,同比增长15%;新能源汽车累计销量预计为900万辆,同比增长35%。

2023年汽车市场发展的有利因素
1、宏观经济适度恢复。
2、宏观政策支持汽车消费。稳增长、扩大内需、地方补贴政策等带动底层消费复苏,推动汽车消费。
3、疫情防控放开有利经济恢复。国内疫情管控放松,有利市场主体发展,推动底层就业收入增加,支撑汽车消费。
4、海外需求及新能源出口继续发展。全球汽车市场继续回暖,中国品牌继续国际化发展,新能源汽车出口带动作用明显。
5、芯片供应逐渐恢复。芯片供应短缺在2023年将有较大缓解。
6、商用车需求触底反弹。随着经济复苏,商用车需求将逐渐升温。
市场分析
从上面可以看出2023年的汽车市场也是非常巨大的,随着各大车企对新能源汽车的大力输出,新能源汽车销量在总销量的占比也越来越大。
所以从新能源汽车,因此我们可以联想到很多行业的发展;新型电池、无人驾驶(未成熟)、充电桩分布、车载系统开发技术、智能座舱等等。
市场决定未来
以上说了许多行业,接下就主要讲讲这几年不景气的IT行业。IT行业的下滑是从业人员的过度饱和与大企业的稳固造成的。
一个行业出现饱和甚至溢出那么就是行业的崩塌,一个人分一个蛋糕和一群人无疑能者居上。
大企业的产品稳固后不需要那么多开发;许多只是维护,而中小企业逐渐退出市场。
所以转行是很多人的选择,而新能源汽车是三十年黄金赛道,不少Android程序员开发已经是看到风向标。都在铺路车载系统开发,抢占先机。
车载前景
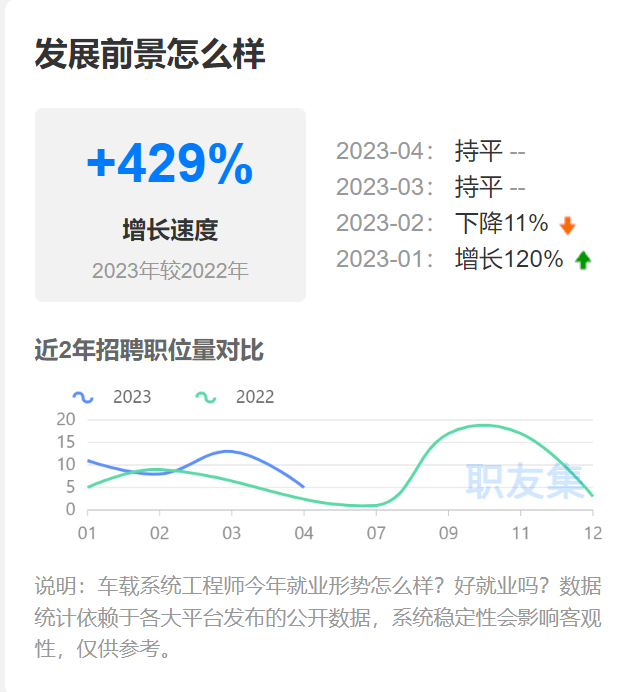
岗位多,薪资高
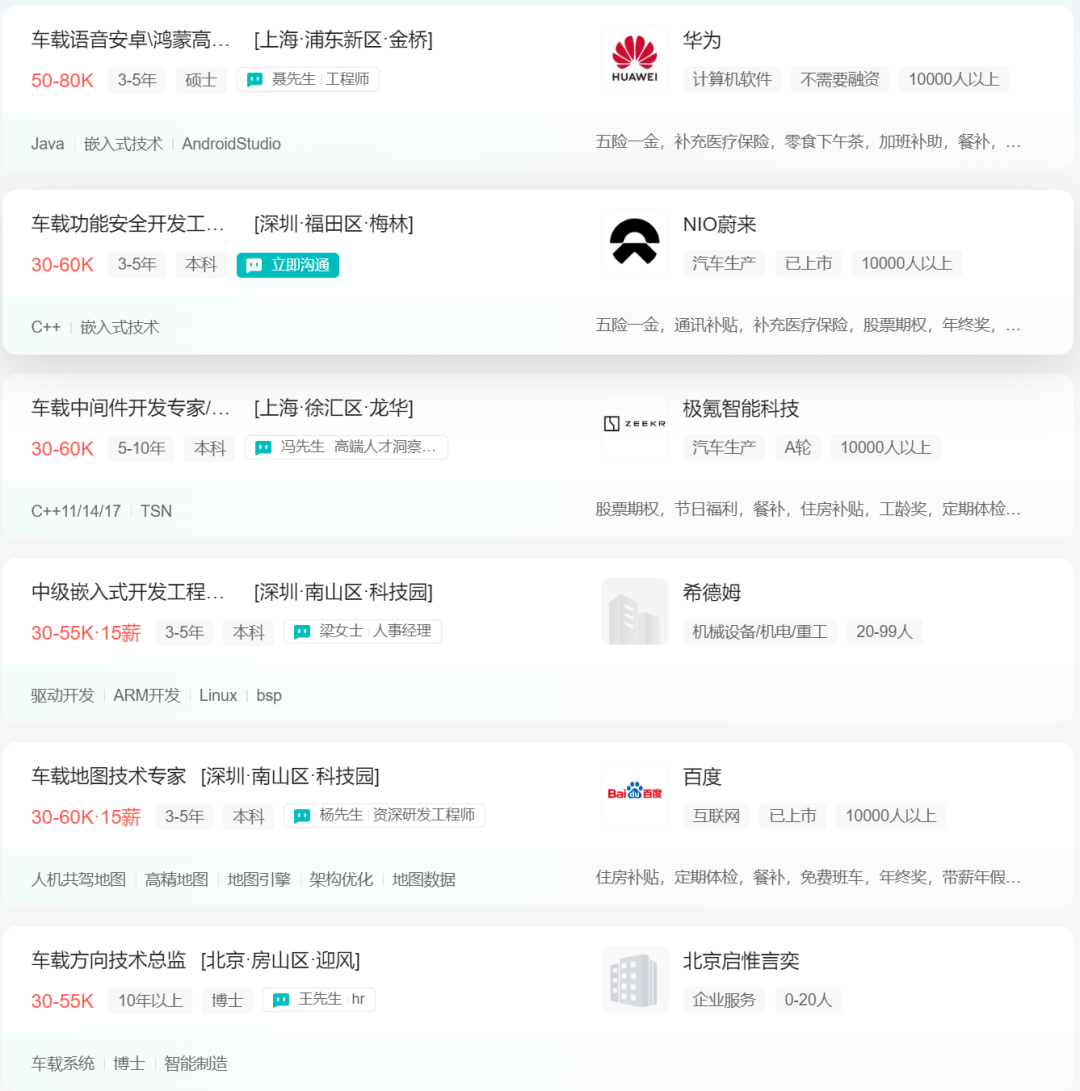
那我们应该掌握哪些技术,才能胜任这些岗位呢?
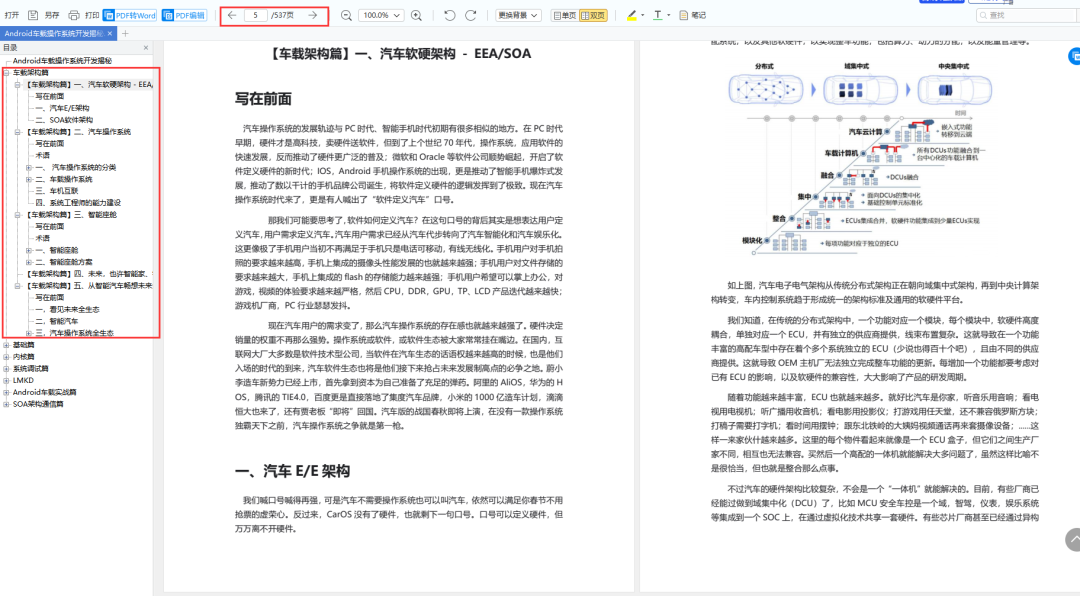
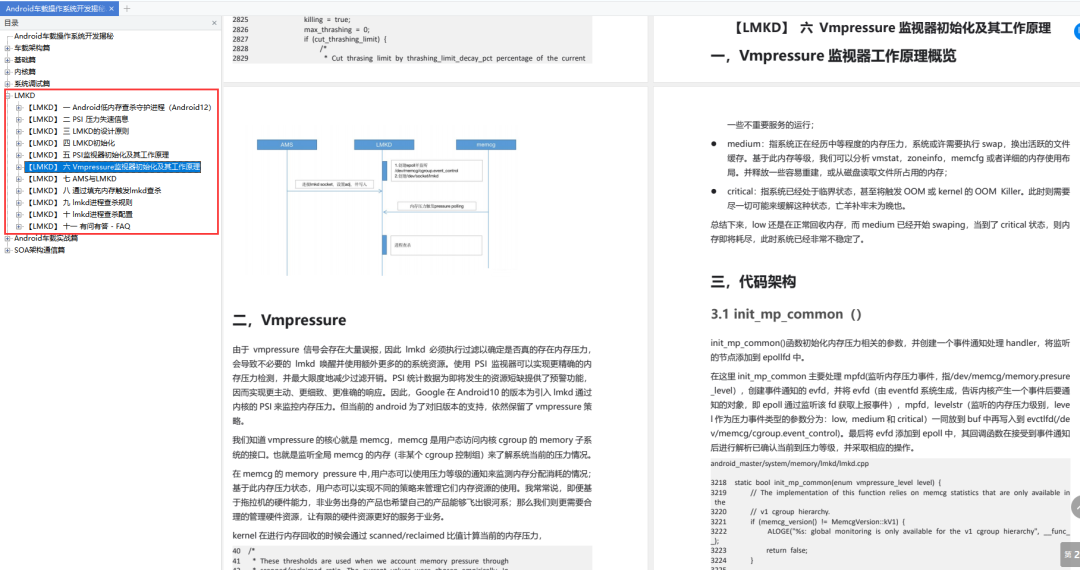
这里分享一份比亚迪内部流出《Android车载开发学习笔记》,帮助大家全方面学习车载系统。
学习笔记内容主要分为七部分 :
【车载架构篇】【内核篇】【系统调试篇】【LMKD】【Android车载实战篇】【架构通信篇】
长按微信扫码免费获取

《Android车载操作系统开发指南》
【车载架构篇】
【基础篇】
1.Android Automotive OS 安卓车载操作系统
2.1Andorid Automotive 源码 aosp_coral_car项目构建流程
2.2Andorid Automotive 镜像刷写流程
2.3Andorid Automotive 源码 aosp_coral_car项目构建及刷写错误集锦
2.4Android Automotive OS 构建失败 Debug集锦
3.[Android Automotive]Android 工具和基础架构
4.[Android Automotive]车载音频
5.[Android Automotive]音频多区
6.[Android Automotive]蓝牙
7.Android AutoMotive 与车机之间物理互联原理
8.Android Automotive OS 启动详解-Init 篇
9.Android Automotive OS 启动详解-Zygote篇
10.Android Automotive OS 启动详解-SystemServer 篇
11.Android Automotive OS 启动详解-CarService 篇
12.Android Automotive OS 启动详解-CarLauncher 篇

【内核篇】
【系统调试篇】

【LMKD】
【Android车载实战篇】
一、Android图像显示系统
二、Android 车载概览
三、开发汽车媒体应用
四、构建 Android Auto 即时通信应用。
五、构建车载导航和地图注点应用
六、构建 Android Automotive OS 视频应用
七、测试 Android 车载应用
八、分发 Android 汽车应用
九、适用于汽车的 Google Play 服务
十、Android Automotive OS 的通知

【架构通信篇】

长按微信扫码免费获取

PS:为了帮助大家对车载行业的深刻了解,我们在5月9日~10日特邀了移动开发领域大佬Avlin和Lance老师给大家分享《车载Automotive系统定制开发》,全方面带大家了解车载行业+OS定制开发,实现属于自己的Automotive系统。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)