多机时间同步设置
在多机编队这一项目中,多机时间同步设置是至关重要的一步。编队的过程中,由于各机器人的系统时间不同步会带来很多问题。多机时间同步分为两种情况,分别为主从机器人均联网和均断网的情形。
1 主从机联网的情况
在完成多机通信后,若主从机都能成功连接上网络,则它们会实现自动同步网络时间,这个时候不需要再进行其他操作就已经实现了时间同步。
2 主从机断网的情况
在完成多机通信后,若主从机均无法成功连接上网络,此时需要手动同步时间。在这里我们使用 date 命令完成时间设置。先安装 terminator 工具,通过 terminator 工具将主从机的控制终端使用窗口分割工具(单击右键设置分割窗口,在不同窗口分别 ssh 登录主从机)安置于同一个终端中。
sudo apt-get install terminator # 下载 terminator 工具分割
终端窗口点击左上方的按钮,选择[广播到所有]/[Broadcast all]这一选项,输入以下命令,利用 terminator 工具在同一时间给主从机设置时间来完成时间同步。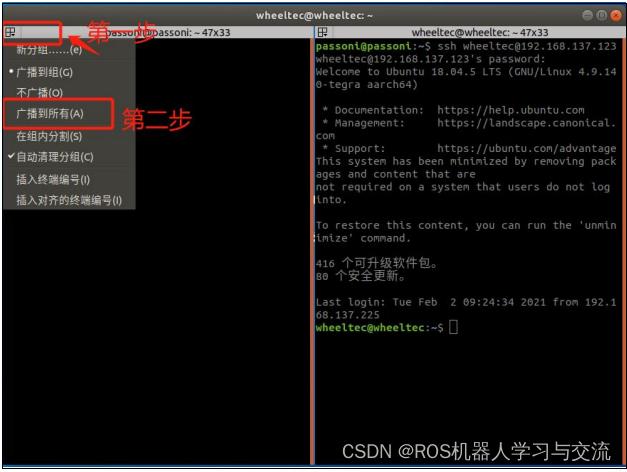 图 14-3-1 广播输入指令操作步骤
图 14-3-1 广播输入指令操作步骤
sudo date -s “2022-01-30 15:15:00” # 手动设置时间
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)