树莓派 4B(2G)的准备工作
- 一、烧录ubuntu server 18.04 LTS镜像
- 二、ubuntu系统安装桌面
- 三、树莓派开启VNC连接
- 1、使用dconf-editor
- 2、开启桌面共享服务
- 3、Windows端下载VNC软件并进行远程连接
- 四、在树莓派上安装ROS机器人操作系统
- 1、设置sources.list(清华源)
- 2、设置密钥
- 3、安装
- 4、初始化 rosdep
- 5、设置环境
- 6、安装依赖
- 7、测试ROS是否安装正常
一、烧录ubuntu server 18.04 LTS镜像
镜像地址:http://cdimage.ubuntu.com/releases/18.04/release/
这里我安装的是ubuntu server 18.04.5(这个版本镜像可以很好的兼容树莓派4B的8G版本,在这个版本之前的镜像基本不兼容树莓派8G版或者对于8G版本的兼容性不好 ),如下图所示:

下载镜像时候,注意一下文件名如下:arm64为64位操作系统 ,armhf为32位操作系统,镜像的版本与自己的树莓派对应,有.img的后缀才是我们要下载的镜像。如果使用的是树莓派4B(8G)版本,只能烧录64位的操作系统
 接下来:向SD卡烧录树莓派镜像的操作,网上有大量教程,不会的话,百度一下。介绍一个树莓派的学习网站。
接下来:向SD卡烧录树莓派镜像的操作,网上有大量教程,不会的话,百度一下。介绍一个树莓派的学习网站。
二、ubuntu系统安装桌面
因为我安装的是server 版本的镜像,这个版本不自带桌面。对于用惯了windows系统的我来说,使用命令行一点点cd找文件,有点头秃。同时ROS自带的rqt和rviz工具,也需要在桌面环境下使用,所以接下来为ubuntu安装桌面。这个版本的镜像默认开启ssh服务。可以
ssh登陆之后
首先更新一下源
sudo apt-get update
安装ubuntu桌面
sudo apt-get install ubuntu-desktop
重启树莓派
三、树莓派开启VNC连接
1、使用dconf-editor
这一步需要将树莓派连接一个显示屏
在命令行中输入
sudo apt-get install dconf-editor
安装完毕之后,在应用中找到并打开 dconf-editor
然后依次打开org->gnome->desktop->remote-access
将 requre-encryption 关闭
(注意:这步注意不要多点,乱点)
附图如下:



再次强调:
dconf-editor是修改ubuntu系统的注册表,所以如果你不知道其他文件是干什么的,不要乱点,否则系统很容易出问题。
2、开启桌面共享服务
在ubuntu系统打开settings->Sharing->Screen Sharing
设置开启服务,并设置密码(这里踩个坑哈,我之前没有设置密码,导致后面我虽然VNC可以连接,但是却显示黑屏)


3、Windows端下载VNC软件并进行远程连接
这里我使用的是VNC Viewer 软件
附上下载链接:https://www.realvnc.com/en/connect/download/viewer/
树莓派和电脑要连接在同一个局域网下面,输入ip地址。查树莓派ip地址我也不多说了。直接看图片



上面这种方法应该是我接触到的相对比较容易的一种
四、在树莓派上安装ROS机器人操作系统
我安装的是ubuntu 18.04版本,此版本对应安装ros版本是melodic
附上官方的安装教程:
http://wiki.ros.org/cn/melodic/Installation/Ubuntu
附上创客制造的安装教程(推荐):
https://www.ncnynl.com/archives/201906/3147.html
1、设置sources.list(清华源)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
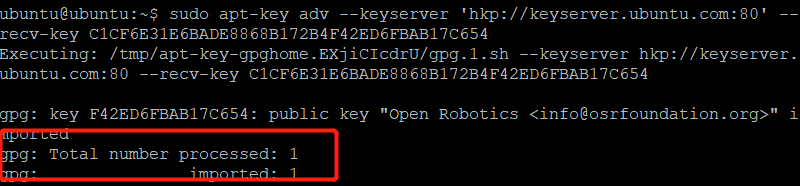
2、设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
如果没有返回图片中的东西,说明设置的安装源可能有问题
3、安装
这里我安装的是完整版,也可以安装其他版本
sudo apt update
sudo apt install ros-melodic-desktop-full
附图如下:(这些是官方文档的内容)
 #这个过程很长需要等待一段时间
#这个过程很长需要等待一段时间
4、初始化 rosdep
sudo rosdep init
rosdep update
这个地方,提示找不到rosdep命令,但是官方文档就这么写的!??
根据提示运行
sudo apt install python-rosdep
这个就可以解决问题了
5、设置环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
source /opt/ros/melodic/setup.bash
6、安装依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
7、测试ROS是否安装正常
开启终端输入
roscore
如果可以正常运行,则ROS的安装没有太大问题
到此为止,树莓派的准备工作基本完成
小白一枚,如有错误,恳请大家批评和指正
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)