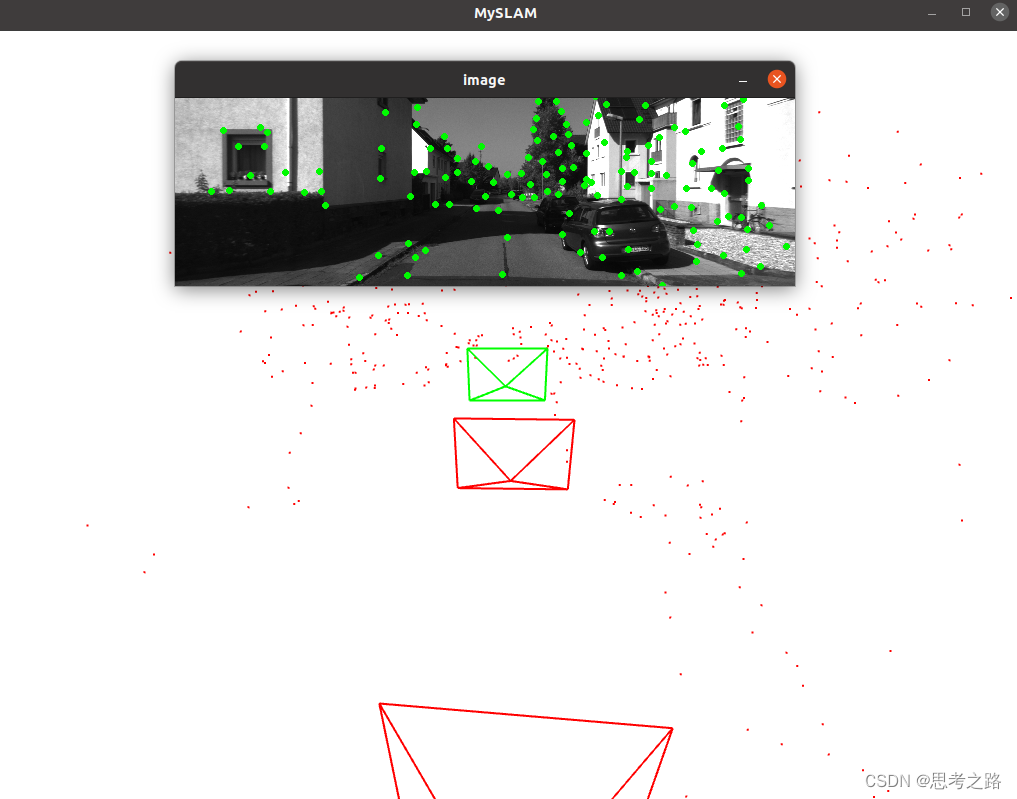
实现一个双目视觉里程计在Kitti数据集中的运行效果。
很有必要多看几遍的例程。
这个视觉里程计由一个光流追踪的前端和一个局部BA的后端组成。双目只需单帧就可初始化,双目存在3D观测,实现效果比单目好。
程序:数据结构+算法
本例程的数据结构是:
- 处理的最基本单元图像。在双目中是一对图像,为一帧。
- 对帧提取特征点。特征点是有很多2D的点。
- 图像之间寻找特征的关联。如果多次看到某个特征,就用三角化方法计算它的3D位置,即路标。
所以图像,特征,路标是这个系统的最基本的结构。其中路标,路标点,地图点都指代3D空间中的点,语义是一样的。

算法:负责提取特征点的算法,负责做三角化的算法,负责处理优化的算法。总的来说有两个模块: - 前端。负责计算相邻图像的特征匹配,往前端中插入图像帧,负责提取图像中的特征点,然后与上一帧进行光流追踪,通过光流结果计算该帧的定位。必要时,应该补充新的特征点并做三角化。前端快速处理保证实时性,前端处理的结果将作为后端优化的初始值。
- 后端。后端是一个较慢的线程,它拿到前端初始化好的关键帧和路标点后,对他们进行优化,然后返回优化结果。后端应该控制优化问题在一定的规模内,不能随时间增长。
这样通过数据结构和算法确定了系统框架,前后端之间放了地图模块来处理他们之间的数据流动。前后段分别在各自的线程中处理数据,前端提取关键帧后,往梯度中添加新的数据;后端检测到地图更新时,运行一次优化,然后把旧的关键帧和地图点去掉,保持优化的规模。
后续的编程除了核心算法外,还需要一些小模块让系统更加方便:
- 需要一个相机类来管理相机的内外参和投影函数;
- 需要一个配置文件管理类,方便从配置文件中读取内容。配置文件中可以记录一些重要的配置参数;
- 算法是在Kitti数据集上运行的,所以需要一个单独的类来按Kitti的存储格式来读取数据;
- 需要一个可视化的模块来观察系统的运行状态,否则就是一连传数值;

实现:
1> 实现基本数据结构
先来实现帧,特征,路标点三个类。对于基本数据结构,通常设为struct,考虑到这些数据会被多个线程同时访问或修改,在关键部分我们需要加线程锁。
Frame结果设计:include/myslam/frame.h
#pragma once
#ifndef MYSLAM_FRAME_H
#define MYSLAM_FRAME_H
#include "myslam/camera.h"
#include "myslam/common_include.h"
namespace myslam {
struct MapPoint;
struct Feature;
struct Frame {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
typedef std::shared_ptr<Frame> Ptr;
unsigned long id_ = 0;
unsigned long keyframe_id_ = 0;
bool is_keyframe_ = false;
double time_stamp_;
SE3 pose_;
std::mutex pose_mutex_;
cv::Mat left_img_, right_img_;
std::vector<std::shared_ptr<Feature>> features_left_;
std::vector<std::shared_ptr<Feature>> features_right_;
public:
Frame() {}
Frame(long id, double time_stamp, const SE3 &pose, const Mat &left,
const Mat &right);
SE3 Pose() {
std::unique_lock<std::mutex> lck(pose_mutex_);
return pose_;
}
void SetPose(const SE3 &pose) {
std::unique_lock<std::mutex> lck(pose_mutex_);
pose_ = pose;
}
void SetKeyFrame();
static std::shared_ptr<Frame> CreateFrame();
};
}
#endif
Feature类:/include/myslam/feature.h
#pragma once
#ifndef MYSLAM_FEATURE_H
#define MYSLAM_FEATURE_H
#include <memory>
#include <opencv2/features2d.hpp>
#include "myslam/common_include.h"
namespace myslam {
struct Frame;
struct MapPoint;
struct Feature {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
typedef std::shared_ptr<Feature> Ptr;
std::weak_ptr<Frame> frame_;
cv::KeyPoint position_;
std::weak_ptr<MapPoint> map_point_;
bool is_outlier_ = false;
bool is_on_left_image_ = true;
public:
Feature() {}
Feature(std::shared_ptr<Frame> frame, const cv::KeyPoint &kp)
: frame_(frame), position_(kp) {}
};
}
#endif
MapPoint类:路标点/include/myslam/mappoint.h
#pragma once
#ifndef MYSLAM_MAPPOINT_H
#define MYSLAM_MAPPOINT_H
#include "myslam/common_include.h"
namespace myslam {
struct Frame;
struct Feature;
struct MapPoint {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
typedef std::shared_ptr<MapPoint> Ptr;
unsigned long id_ = 0;
bool is_outlier_ = false;
Vec3 pos_ = Vec3::Zero();
std::mutex data_mutex_;
int observed_times_ = 0;
std::list<std::weak_ptr<Feature>> observations_;
MapPoint() {}
MapPoint(long id, Vec3 position);
Vec3 Pos() {
std::unique_lock<std::mutex> lck(data_mutex_);
return pos_;
}
void SetPos(const Vec3 &pos) {
std::unique_lock<std::mutex> lck(data_mutex_);
pos_ = pos;
};
void AddObservation(std::shared_ptr<Feature> feature) {
std::unique_lock<std::mutex> lck(data_mutex_);
observations_.push_back(feature);
observed_times_++;
}
void RemoveObservation(std::shared_ptr<Feature> feat);
std::list<std::weak_ptr<Feature>> GetObs() {
std::unique_lock<std::mutex> lck(data_mutex_);
return observations_;
}
static MapPoint::Ptr CreateNewMappoint();
};
}
#endif
最后还需要定义一个地图类:Frame和MapPoint类的对象归地图持有。
#pragma once
#ifndef MAP_H
#define MAP_H
#include "myslam/common_include.h"
#include "myslam/frame.h"
#include "myslam/mappoint.h"
namespace myslam {
class Map {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
typedef std::shared_ptr<Map> Ptr;
typedef std::unordered_map<unsigned long, MapPoint::Ptr> LandmarksType;
typedef std::unordered_map<unsigned long, Frame::Ptr> KeyframesType;
Map() {}
void InsertKeyFrame(Frame::Ptr frame);
void InsertMapPoint(MapPoint::Ptr map_point);
LandmarksType GetAllMapPoints() {
std::unique_lock<std::mutex> lck(data_mutex_);
return landmarks_;
}
KeyframesType GetAllKeyFrames() {
std::unique_lock<std::mutex> lck(data_mutex_);
return keyframes_;
}
LandmarksType GetActiveMapPoints() {
std::unique_lock<std::mutex> lck(data_mutex_);
return active_landmarks_;
}
KeyframesType GetActiveKeyFrames() {
std::unique_lock<std::mutex> lck(data_mutex_);
return active_keyframes_;
}
void CleanMap();
private:
void RemoveOldKeyframe();
std::mutex data_mutex_;
LandmarksType landmarks_;
LandmarksType active_landmarks_;
KeyframesType keyframes_;
KeyframesType active_keyframes_;
Frame::Ptr current_frame_ = nullptr;
int num_active_keyframes_ = 7;
};
}
#endif
2> 前端
定义好基本的数据结构后,我们看来前端的功能,前端需要根据双目图像确定v该镇的位置。每帧都有左右目,进行三角化的时候如何选任意两张图像做三角化,考虑不一致,所以位我们先来确定前端的处理逻辑:
- 前端本身有初始化,正常追踪,追踪丢失三种状态;
- 在初始化状态中,根据左右目之间的光流匹配,寻找可以三角化的地图点,成功建立处是地图;
- 追踪阶段中,前端计算上一帧的特征点到当前帧的光流,根据光流结果计算图像位姿。该计算只使用左目图像,不使用右目;
- 如果追踪到的点较少,就判定当前帧为关键帧。对于关键帧,有以下几个点:
- 提取新的特征点。
- 找到这些点在右图中的对应点,用三角化建立新的路标点。
- 将新的关键帧和路标点加入到地图,并触发一次后端优化。 - 如果追踪丢失,就重置前端系统,重新初始化
#include <opencv2/opencv.hpp>
#include "myslam/algorithm.h"
#include "myslam/backend.h"
#include "myslam/config.h"
#include "myslam/feature.h"
#include "myslam/frontend.h"
#include "myslam/g2o_types.h"
#include "myslam/map.h"
#include "myslam/viewer.h"
namespace myslam {
Frontend::Frontend() {
gftt_ =
cv::GFTTDetector::create(Config::Get<int>("num_features"), 0.01, 20);
num_features_init_ = Config::Get<int>("num_features_init");
num_features_ = Config::Get<int>("num_features");
}
bool Frontend::AddFrame(myslam::Frame::Ptr frame) {
current_frame_ = frame;
switch (status_) {
case FrontendStatus::INITING:
StereoInit();
break;
case FrontendStatus::TRACKING_GOOD:
case FrontendStatus::TRACKING_BAD:
Track();
break;
case FrontendStatus::LOST:
Reset();
break;
}
last_frame_ = current_frame_;
return true;
}
bool Frontend::Track() {
if (last_frame_) {
current_frame_->SetPose(relative_motion_ * last_frame_->Pose());
}
int num_track_last = TrackLastFrame();
tracking_inliers_ = EstimateCurrentPose();
if (tracking_inliers_ > num_features_tracking_) {
status_ = FrontendStatus::TRACKING_GOOD;
} else if (tracking_inliers_ > num_features_tracking_bad_) {
status_ = FrontendStatus::TRACKING_BAD;
} else {
status_ = FrontendStatus::LOST;
}
InsertKeyframe();
relative_motion_ = current_frame_->Pose() * last_frame_->Pose().inverse();
if (viewer_) viewer_->AddCurrentFrame(current_frame_);
return true;
}
bool Frontend::InsertKeyframe() {
if (tracking_inliers_ >= num_features_needed_for_keyframe_) {
return false;
}
current_frame_->SetKeyFrame();
map_->InsertKeyFrame(current_frame_);
LOG(INFO) << "Set frame " << current_frame_->id_ << " as keyframe "
<< current_frame_->keyframe_id_;
SetObservationsForKeyFrame();
DetectFeatures();
FindFeaturesInRight();
TriangulateNewPoints();
backend_->UpdateMap();
if (viewer_) viewer_->UpdateMap();
return true;
}
void Frontend::SetObservationsForKeyFrame() {
for (auto &feat : current_frame_->features_left_) {
auto mp = feat->map_point_.lock();
if (mp) mp->AddObservation(feat);
}
}
int Frontend::TriangulateNewPoints() {
std::vector<SE3> poses{camera_left_->pose(), camera_right_->pose()};
SE3 current_pose_Twc = current_frame_->Pose().inverse();
int cnt_triangulated_pts = 0;
for (size_t i = 0; i < current_frame_->features_left_.size(); ++i) {
if (current_frame_->features_left_[i]->map_point_.expired() &&
current_frame_->features_right_[i] != nullptr) {
std::vector<Vec3> points{
camera_left_->pixel2camera(
Vec2(current_frame_->features_left_[i]->position_.pt.x,
current_frame_->features_left_[i]->position_.pt.y)),
camera_right_->pixel2camera(
Vec2(current_frame_->features_right_[i]->position_.pt.x,
current_frame_->features_right_[i]->position_.pt.y))};
Vec3 pworld = Vec3::Zero();
if (triangulation(poses, points, pworld) && pworld[2] > 0) {
auto new_map_point = MapPoint::CreateNewMappoint();
pworld = current_pose_Twc * pworld;
new_map_point->SetPos(pworld);
new_map_point->AddObservation(
current_frame_->features_left_[i]);
new_map_point->AddObservation(
current_frame_->features_right_[i]);
current_frame_->features_left_[i]->map_point_ = new_map_point;
current_frame_->features_right_[i]->map_point_ = new_map_point;
map_->InsertMapPoint(new_map_point);
cnt_triangulated_pts++;
}
}
}
LOG(INFO) << "new landmarks: " << cnt_triangulated_pts;
return cnt_triangulated_pts;
}
int Frontend::EstimateCurrentPose() {
typedef g2o::BlockSolver_6_3 BlockSolverType;
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType>
LinearSolverType;
auto solver = new g2o::OptimizationAlgorithmLevenberg(
g2o::make_unique<BlockSolverType>(
g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
VertexPose *vertex_pose = new VertexPose();
vertex_pose->setId(0);
vertex_pose->setEstimate(current_frame_->Pose());
optimizer.addVertex(vertex_pose);
Mat33 K = camera_left_->K();
int index = 1;
std::vector<EdgeProjectionPoseOnly *> edges;
std::vector<Feature::Ptr> features;
for (size_t i = 0; i < current_frame_->features_left_.size(); ++i) {
auto mp = current_frame_->features_left_[i]->map_point_.lock();
if (mp) {
features.push_back(current_frame_->features_left_[i]);
EdgeProjectionPoseOnly *edge =
new EdgeProjectionPoseOnly(mp->pos_, K);
edge->setId(index);
edge->setVertex(0, vertex_pose);
edge->setMeasurement(
toVec2(current_frame_->features_left_[i]->position_.pt));
edge->setInformation(Eigen::Matrix2d::Identity());
edge->setRobustKernel(new g2o::RobustKernelHuber);
edges.push_back(edge);
optimizer.addEdge(edge);
index++;
}
}
const double chi2_th = 5.991;
int cnt_outlier = 0;
for (int iteration = 0; iteration < 4; ++iteration) {
vertex_pose->setEstimate(current_frame_->Pose());
optimizer.initializeOptimization();
optimizer.optimize(10);
cnt_outlier = 0;
for (size_t i = 0; i < edges.size(); ++i) {
auto e = edges[i];
if (features[i]->is_outlier_) {
e->computeError();
}
if (e->chi2() > chi2_th) {
features[i]->is_outlier_ = true;
e->setLevel(1);
cnt_outlier++;
} else {
features[i]->is_outlier_ = false;
e->setLevel(0);
};
if (iteration == 2) {
e->setRobustKernel(nullptr);
}
}
}
LOG(INFO) << "Outlier/Inlier in pose estimating: " << cnt_outlier << "/"
<< features.size() - cnt_outlier;
current_frame_->SetPose(vertex_pose->estimate());
LOG(INFO) << "Current Pose = \n" << current_frame_->Pose().matrix();
for (auto &feat : features) {
if (feat->is_outlier_) {
feat->map_point_.reset();
feat->is_outlier_ = false;
}
}
return features.size() - cnt_outlier;
}
int Frontend::TrackLastFrame() {
std::vector<cv::Point2f> kps_last, kps_current;
for (auto &kp : last_frame_->features_left_) {
if (kp->map_point_.lock()) {
auto mp = kp->map_point_.lock();
auto px =
camera_left_->world2pixel(mp->pos_, current_frame_->Pose());
kps_last.push_back(kp->position_.pt);
kps_current.push_back(cv::Point2f(px[0], px[1]));
} else {
kps_last.push_back(kp->position_.pt);
kps_current.push_back(kp->position_.pt);
}
}
std::vector<uchar> status;
Mat error;
cv::calcOpticalFlowPyrLK(
last_frame_->left_img_, current_frame_->left_img_, kps_last,
kps_current, status, error, cv::Size(11, 11), 3,
cv::TermCriteria(cv::TermCriteria::COUNT + cv::TermCriteria::EPS, 30,
0.01),
cv::OPTFLOW_USE_INITIAL_FLOW);
int num_good_pts = 0;
for (size_t i = 0; i < status.size(); ++i) {
if (status[i]) {
cv::KeyPoint kp(kps_current[i], 7);
Feature::Ptr feature(new Feature(current_frame_, kp));
feature->map_point_ = last_frame_->features_left_[i]->map_point_;
current_frame_->features_left_.push_back(feature);
num_good_pts++;
}
}
LOG(INFO) << "Find " << num_good_pts << " in the last image.";
return num_good_pts;
}
bool Frontend::StereoInit() {
int num_features_left = DetectFeatures();
int num_coor_features = FindFeaturesInRight();
if (num_coor_features < num_features_init_) {
return false;
}
bool build_map_success = BuildInitMap();
if (build_map_success) {
status_ = FrontendStatus::TRACKING_GOOD;
if (viewer_) {
viewer_->AddCurrentFrame(current_frame_);
viewer_->UpdateMap();
}
return true;
}
return false;
}
int Frontend::DetectFeatures() {
cv::Mat mask(current_frame_->left_img_.size(), CV_8UC1, 255);
for (auto &feat : current_frame_->features_left_) {
cv::rectangle(mask, feat->position_.pt - cv::Point2f(10, 10),
feat->position_.pt + cv::Point2f(10, 10), 0, CV_FILLED);
}
std::vector<cv::KeyPoint> keypoints;
gftt_->detect(current_frame_->left_img_, keypoints, mask);
int cnt_detected = 0;
for (auto &kp : keypoints) {
current_frame_->features_left_.push_back(
Feature::Ptr(new Feature(current_frame_, kp)));
cnt_detected++;
}
LOG(INFO) << "Detect " << cnt_detected << " new features";
return cnt_detected;
}
int Frontend::FindFeaturesInRight() {
std::vector<cv::Point2f> kps_left, kps_right;
for (auto &kp : current_frame_->features_left_) {
kps_left.push_back(kp->position_.pt);
auto mp = kp->map_point_.lock();
if (mp) {
auto px =
camera_right_->world2pixel(mp->pos_, current_frame_->Pose());
kps_right.push_back(cv::Point2f(px[0], px[1]));
} else {
kps_right.push_back(kp->position_.pt);
}
}
std::vector<uchar> status;
Mat error;
cv::calcOpticalFlowPyrLK(
current_frame_->left_img_, current_frame_->right_img_, kps_left,
kps_right, status, error, cv::Size(11, 11), 3,
cv::TermCriteria(cv::TermCriteria::COUNT + cv::TermCriteria::EPS, 30,
0.01),
cv::OPTFLOW_USE_INITIAL_FLOW);
int num_good_pts = 0;
for (size_t i = 0; i < status.size(); ++i) {
if (status[i]) {
cv::KeyPoint kp(kps_right[i], 7);
Feature::Ptr feat(new Feature(current_frame_, kp));
feat->is_on_left_image_ = false;
current_frame_->features_right_.push_back(feat);
num_good_pts++;
} else {
current_frame_->features_right_.push_back(nullptr);
}
}
LOG(INFO) << "Find " << num_good_pts << " in the right image.";
return num_good_pts;
}
bool Frontend::BuildInitMap() {
std::vector<SE3> poses{camera_left_->pose(), camera_right_->pose()};
size_t cnt_init_landmarks = 0;
for (size_t i = 0; i < current_frame_->features_left_.size(); ++i) {
if (current_frame_->features_right_[i] == nullptr) continue;
std::vector<Vec3> points{
camera_left_->pixel2camera(
Vec2(current_frame_->features_left_[i]->position_.pt.x,
current_frame_->features_left_[i]->position_.pt.y)),
camera_right_->pixel2camera(
Vec2(current_frame_->features_right_[i]->position_.pt.x,
current_frame_->features_right_[i]->position_.pt.y))};
Vec3 pworld = Vec3::Zero();
if (triangulation(poses, points, pworld) && pworld[2] > 0) {
auto new_map_point = MapPoint::CreateNewMappoint();
new_map_point->SetPos(pworld);
new_map_point->AddObservation(current_frame_->features_left_[i]);
new_map_point->AddObservation(current_frame_->features_right_[i]);
current_frame_->features_left_[i]->map_point_ = new_map_point;
current_frame_->features_right_[i]->map_point_ = new_map_point;
cnt_init_landmarks++;
map_->InsertMapPoint(new_map_point);
}
}
current_frame_->SetKeyFrame();
map_->InsertKeyFrame(current_frame_);
backend_->UpdateMap();
LOG(INFO) << "Initial map created with " << cnt_init_landmarks
<< " map points";
return true;
}
bool Frontend::Reset() {
LOG(INFO) << "Reset is not implemented. ";
return true;
}
}
后端优化:
#include "myslam/backend.h"
#include "myslam/algorithm.h"
#include "myslam/feature.h"
#include "myslam/g2o_types.h"
#include "myslam/map.h"
#include "myslam/mappoint.h"
namespace myslam {
Backend::Backend() {
backend_running_.store(true);
backend_thread_ = std::thread(std::bind(&Backend::BackendLoop, this));
}
void Backend::UpdateMap() {
std::unique_lock<std::mutex> lock(data_mutex_);
map_update_.notify_one();
}
void Backend::Stop() {
backend_running_.store(false);
map_update_.notify_one();
backend_thread_.join();
}
void Backend::BackendLoop() {
while (backend_running_.load()) {
std::unique_lock<std::mutex> lock(data_mutex_);
map_update_.wait(lock);
Map::KeyframesType active_kfs = map_->GetActiveKeyFrames();
Map::LandmarksType active_landmarks = map_->GetActiveMapPoints();
Optimize(active_kfs, active_landmarks);
}
}
void Backend::Optimize(Map::KeyframesType &keyframes,
Map::LandmarksType &landmarks) {
typedef g2o::BlockSolver_6_3 BlockSolverType;
typedef g2o::LinearSolverCSparse<BlockSolverType::PoseMatrixType>
LinearSolverType;
auto solver = new g2o::OptimizationAlgorithmLevenberg(
g2o::make_unique<BlockSolverType>(
g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
std::map<unsigned long, VertexPose *> vertices;
unsigned long max_kf_id = 0;
for (auto &keyframe : keyframes) {
auto kf = keyframe.second;
VertexPose *vertex_pose = new VertexPose();
vertex_pose->setId(kf->keyframe_id_);
vertex_pose->setEstimate(kf->Pose());
optimizer.addVertex(vertex_pose);
if (kf->keyframe_id_ > max_kf_id) {
max_kf_id = kf->keyframe_id_;
}
vertices.insert({kf->keyframe_id_, vertex_pose});
}
std::map<unsigned long, VertexXYZ *> vertices_landmarks;
Mat33 K = cam_left_->K();
SE3 left_ext = cam_left_->pose();
SE3 right_ext = cam_right_->pose();
int index = 1;
double chi2_th = 5.991;
std::map<EdgeProjection *, Feature::Ptr> edges_and_features;
for (auto &landmark : landmarks) {
if (landmark.second->is_outlier_) continue;
unsigned long landmark_id = landmark.second->id_;
auto observations = landmark.second->GetObs();
for (auto &obs : observations) {
if (obs.lock() == nullptr) continue;
auto feat = obs.lock();
if (feat->is_outlier_ || feat->frame_.lock() == nullptr) continue;
auto frame = feat->frame_.lock();
EdgeProjection *edge = nullptr;
if (feat->is_on_left_image_) {
edge = new EdgeProjection(K, left_ext);
} else {
edge = new EdgeProjection(K, right_ext);
}
if (vertices_landmarks.find(landmark_id) ==
vertices_landmarks.end()) {
VertexXYZ *v = new VertexXYZ;
v->setEstimate(landmark.second->Pos());
v->setId(landmark_id + max_kf_id + 1);
v->setMarginalized(true);
vertices_landmarks.insert({landmark_id, v});
optimizer.addVertex(v);
}
edge->setId(index);
edge->setVertex(0, vertices.at(frame->keyframe_id_));
edge->setVertex(1, vertices_landmarks.at(landmark_id));
edge->setMeasurement(toVec2(feat->position_.pt));
edge->setInformation(Mat22::Identity());
auto rk = new g2o::RobustKernelHuber();
rk->setDelta(chi2_th);
edge->setRobustKernel(rk);
edges_and_features.insert({edge, feat});
optimizer.addEdge(edge);
index++;
}
}
optimizer.initializeOptimization();
optimizer.optimize(10);
int cnt_outlier = 0, cnt_inlier = 0;
int iteration = 0;
while (iteration < 5) {
cnt_outlier = 0;
cnt_inlier = 0;
for (auto &ef : edges_and_features) {
if (ef.first->chi2() > chi2_th) {
cnt_outlier++;
} else {
cnt_inlier++;
}
}
double inlier_ratio = cnt_inlier / double(cnt_inlier + cnt_outlier);
if (inlier_ratio > 0.5) {
break;
} else {
chi2_th *= 2;
iteration++;
}
}
for (auto &ef : edges_and_features) {
if (ef.first->chi2() > chi2_th) {
ef.second->is_outlier_ = true;
ef.second->map_point_.lock()->RemoveObservation(ef.second);
} else {
ef.second->is_outlier_ = false;
}
}
LOG(INFO) << "Outlier/Inlier in optimization: " << cnt_outlier << "/"
<< cnt_inlier;
for (auto &v : vertices) {
keyframes.at(v.first)->SetPose(v.second->estimate());
}
for (auto &v : vertices_landmarks) {
landmarks.at(v.first)->SetPos(v.second->estimate());
}
}
}
实现效果:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)