Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
T265 VS D435i
2023-05-16
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
T265
D435i
T265 VS D435i 的相关文章
Realsense T265双目+IMU传感器追踪相机的环境配置指南(Ubuntu+Windows)
T265追踪相机 xff0c 可以直接读取里程计信息 xff0c 直接输出位置 速度等参数 xff0c 为了了解如何使用 xff0c 利用网上的信息进行了环境的配置 xff0c 先测试的是Windows平台的使用 xff0c 后来在Ubun
VINS_MONO+D435i Realtime运行
艰难地运行了三天 终于算是搞定了 主要的时间和精力都花在标定上了 总结一些需要注意的点 希望能对同样使用VINS MONO的人有帮助 先说一下我的初衷 其实是想要使用ORBSLAM3的Mono Inertial的 但是总是会初始化失败 图像
realsense d435i SDK及ROS Wrapper安装
1 安装Realsense SDK git clone https span class token punctuation span span class token operator span github span class tok
JetsonNano配置RealSense D435i运行环境
JetsonNano配置RealSense D435i运行环境 文章目录 JetsonNano配置RealSense D435i运行环境0 前言1 系统环境2 安装ubuntu源自带的SDK问题及解决问题解决方法 xff1a 3 源码编译S
python实现d435i深度相机测量两点之间的距离
本文介绍python方法实现intel公司realsense系列d435i深度相机测量彩色图像上两点之间的距离 原理很简单 xff0c 就是将相机获得的彩色图像流与深度流对齐 xff0c 这样彩色图像上的每个像素就会对应一个深度值 xff0
Deploying T265 in Ubuntu20.04 (PX4_VIO)
Release 转载请注明出处https blog csdn net qq 46037020 article details 123203784 该文章的中文为个人经验总结与提示 xff0c 英文部分为资料原文摘抄引用 xff0c 便于在
配置树莓派4B+Ubuntu-22.04.2+Intel Realsense T265
准备 xff1a 树莓派4b Ubuntu 22 04 2 T265 开始玩树莓派和T265时配置环境配置了半天 xff0c 各种报错 xff0c 在不熟悉这些的情况下想要配置一个稳定不报错的系统就只有不断的尝试 xff0c 再重装了10次
手把手教你实现ROS Melodic+Realsense D435i
转载自 xff1a https blog csdn net u013494161 article details 112392528
Ubuntu下安装ROS以及使用ROS读取T265、D435i数据
安装ROS xff1a ROS Melodic安装 智学无人小车平台 czxy com 创建ROS工作空间 xff1a 14条消息 ROS学习 第3篇 xff1a ROS基础 创建工作空间 北理工 王大东的博客 CSDN博客 ros创建工作
手把手教你实现ROS Melodic+Realsense D435i
硬件配置 xff1a HP ProDesk 480 G6 MT 系统内存 xff1a 8G 处理器 xff1a Intel i7 8700 CPU 操作系统 xff1a Ubuntu 18 04 相机配置 xff1a Intel Reals
C#下使用RealSense D435i获取图像,深度,导出.ply点云
首先需要在NuGet管理中安装RealSense库相关包 主要安装下面两个包 xff1a 代码中引入 xff1a using Intel RealSense 配置相机 var cfg 61 new Config using var ctx
Intel RealSense D435i Calibration
Intel RealSense D435i Calibration 0 引言1 标定工具安装1 1 imu utils Install1 2 kalibr Install 2 IMU标定3 相机标定4 IMU 43 相机联合标定5 VINS
【20-8-7】树莓派上部署英特尔深度相机IntelRealsense T265
最近在搭建无人机的自主飞行平台 xff0c 无GPS的情况下室内定位的方案除了光流 xff0c 最好的就是配合intel的realsense系列的摄像头 尤其是T265本身带IMU xff0c 可以直接给飞控输出位姿信息 xff0c 不管是
树莓派4B(ubuntu mate系统)使用d435i运行vins
树莓派4B xff08 ubuntu mate系统 xff09 使用d435i运行vins 提示本文为随手笔记 xff0c 并不严谨 xff0c 可参考 xff1a 博客和博客进行配置 树莓派 ubuntu mate 20系统安装ros的步
2 用D435i运行VINS-fusion
文章目录 1 VINS fusion的安装1 1 环境和依赖的安装1 2 编译VINS Fusion1 3 编译错误解决方法 2 VINS Fusion跑数据集3 用相机运行VINS Fusion 环境 xff1a Ubuntu20 04
Intel RealSense D435i 深度相机介绍
参考 xff1a https www sohu com a 340984033 715754https www chiphell com thread 1945054 1 1 htmlhttps blog csdn net cherry y
Ubuntu18.04 Realsense D435i驱动安装与配置
InterRealSenseD435i SDK安装 一 命令行的安装方式安装 1 注册服务器的公钥 xff1a 打开终端输入 sudo apt key adv keyserver keys gnupg net recv key C8B3A5
ubuntu18.04安装Realsense D435i 摄像头的驱动SDK和ROS Wrapper
ubuntu18 04安装Realsense D435i 摄像头的驱动SDK和ROS Wrapper 2022年更新 xff1a 安装教程同 xff1b 进更新安装包下载方式和下载链接 见文末 1 安装Realsense SDK 1 下载s
使用Xavier读取RealSense D435i的踩坑经历
由于项目需要 xff0c 最近开始研究通过Xavier运行VINS的方法 xff0c 使用的传感器是Intel的RealSense xff0c 但是Xavier对RealSense的支持却不怎么好 xff0c 下面介绍一下躲坑方法 xff0
ROS与深度相机入门教程:(1)Ubuntu16.04 在ROS中驱动Intel D435i深度相机
Intel在Github上开源了支持所有RealSense系列相机的SDK 包括了D400 SR300系列深度相机和T265双目跟踪相机 支持Linux Windows Mac OS以及Android 链接 https github com
随机推荐
jetson xavier nx 安装D435i
1 xff0c Realsense sdk安装 git clone https span class token operator span span class token comment github com jetsonhacks i
卸载opencv 安装cuda版本的opencv
第一推荐 https span class token operator span span class token comment zhuanlan zhihu com p 411901208 span 一 卸载opencv xff08
D435i VINS-Fusion环境搭建
参考网址 https span class token operator span span class token comment github com kuankuan yue VINS FUSION leanrning span 1
jetson nx 安装cuda 10.2
看到的另外两个方案 https span class token operator span span class token comment blog csdn net FRD2009041510 article details 4204
LIO-SAM ouster
1 ROS tested with Melodic sudo apt span class token operator span get install span class token operator span y ros span
数据分析业务场景 | 用户画像
一 概况 定义 是根据用户的一系列行为和意识过程建立起来的多维度标签 xff1b 是根据用户人口学特征 xff0c 网络浏览内容 xff0c 网络社交活动和消费行为等信息而抽象出的一个标签化的用户模型 xff1b 首要任务 xff1a 根据
D435i vins搜集资料
在D435i上运行VINS Mono 前面都测试好之后就可以再D435i上运行VINS Mone了 xff0c 这里特地感谢下博客如何用Realsense D435i运行VINS Mono等VIO算法 获取IMU同步数据的作者Manii x
mavros常用控制消息
数传 用于查看数传状态 xff1a span class token operator span mavros span class token operator span span class token function radio s
启动T265
室内T265定点飞行 先启动基本vio脚本 roslaunch p450 experiment p450 vio onboard launch 再启动控制脚本 roslaunch p450 experiment p450 vio contr
VINS标定---Ego-planner
1 检查realsense 和飞控的连接 查看飞控串口 ls span class token operator span dev span class token operator span ttyA span class token o
ego-planner框架和参数
drone id 对应飞机的编号 从0开始 map size xyz 地图场地大小 xff0c 给的目标点要在地图范围内 fx fy cx cy 相机内参 obstacles inflation 障碍物膨胀大小 是 飞机外廓尺寸的1 5倍
执行 install_geographiclib_datasets.sh 错误
https blog csdn net weixin 41865104 article details 119418901 在 usr share 新建GeographicLib文件夹 在 usr share GeographicLib 文
通过mavros的桥接连接qgc
fcu url指定的是飞控的连接方式 xff0c 设置飞控为正确的端口即可 gcs url指定的是QGC所在主机的IP xff0c 这个换为运行QGC主机的IP地址即可 如果不知道主机的IP地址可以用udp发布方式 gcs url span
ros在同一工作空间下调用其它功能包的头文件
A功能包需要调用B功能包的头文件 在B功能包CMakeLists txt中修改 去掉catkin package中的include注释 xff08 让别人能识别到自己的头文件 xff09 A功能包在find package时能识别到B功能包
千寻位置NTRIP网络基准站
端口选择NTRIP连接方式 xff1b 点击 Connect 输入Enter URL Enter URL格式 xff1a http NTRIP账号 xff1a 密码 64 rtk ntrip qxwz com 通道号 RTCM32 GGB
关于egoplanner fastplanner内PID的控制
Kp0 Kp1 Kp2 Kv0 Kv1 Kv2
如何描述数据分布的特征?
数据分布的特征可以从集中趋势 xff0c 离中趋势 xff0c 偏态和峰态三个方面进行描述 一 集中趋势 xff08 位置 xff09 是一组平均指标 xff0c 它反映了总体的一般水平或分布 1 平均数 分为 xff1a 简单平均数 xf
对于egoplanner的障碍物分析
根源 根据障碍物检查并分段初始轨迹 bool BsplineOptimizer span class token operator span span class token function check collision and reb
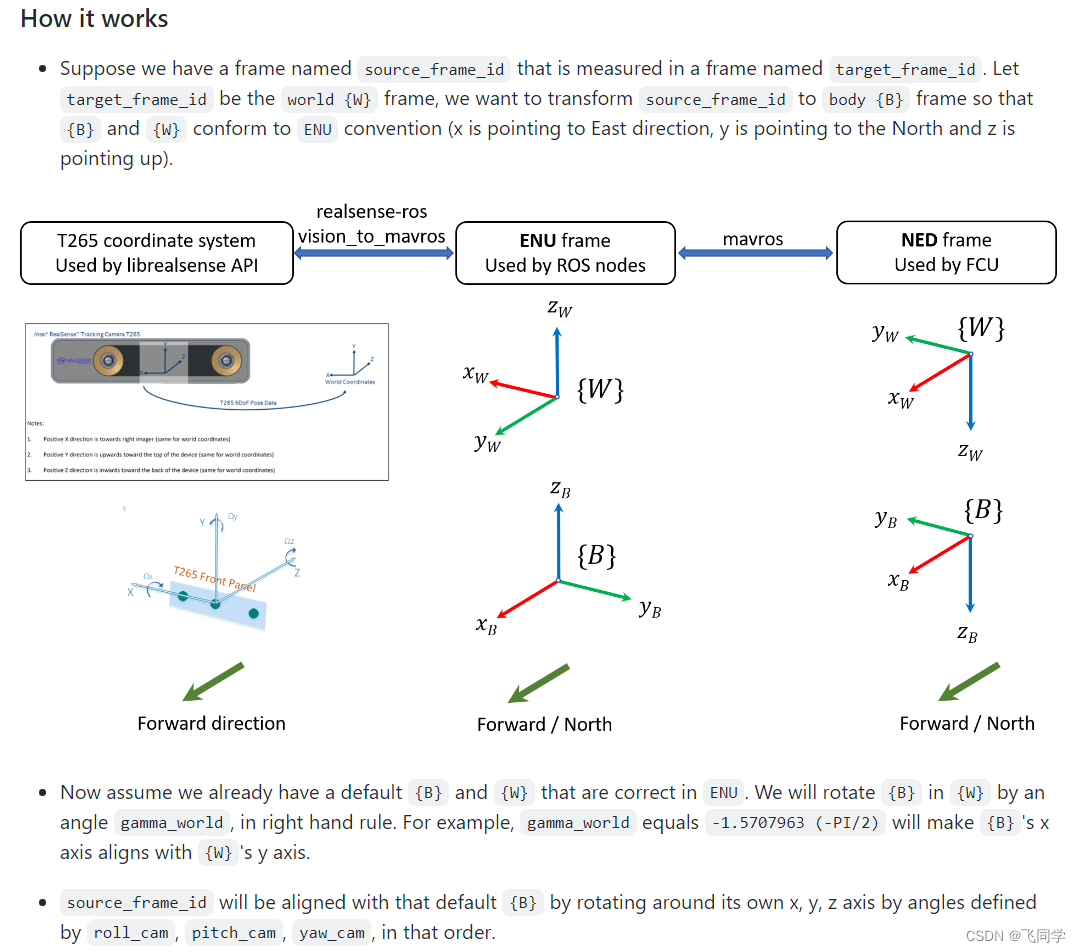
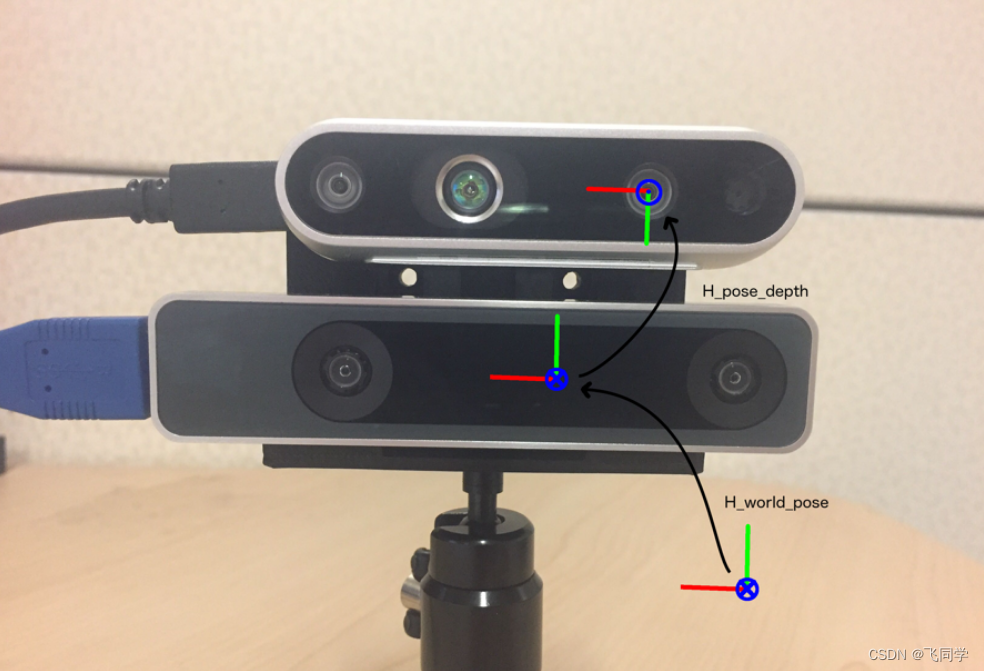
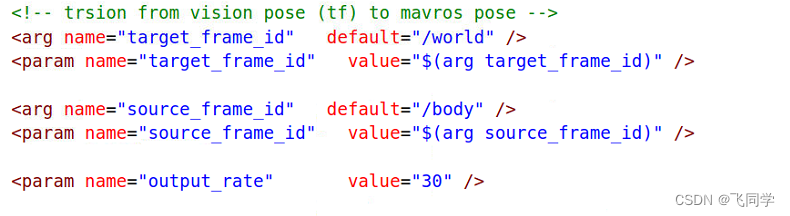
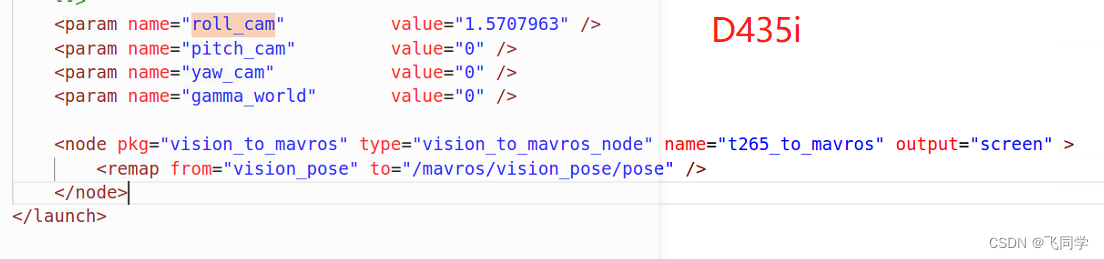
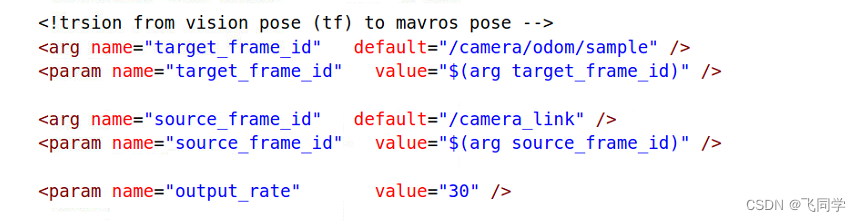
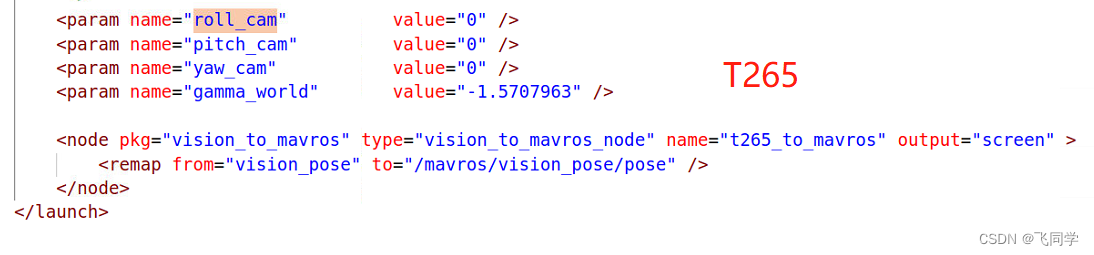
t265 通过mavros传递定位信息px4
https github com thien94 vision to mavros 通过话题 mavros vision pose pose 向PX4发送位置数据 t265两种安装方式 xff1a USB口朝右镜头向前和向下安装 如需其它方
T265 VS D435i
热门标签
failfast
scssmixins
tigerlines
atlcom
itemplate
baml
r2rml
dmake
nes
6502
pry
corewlan
i18njs
forofloop