几个坐标系转来转去,时间一长又搞混了。
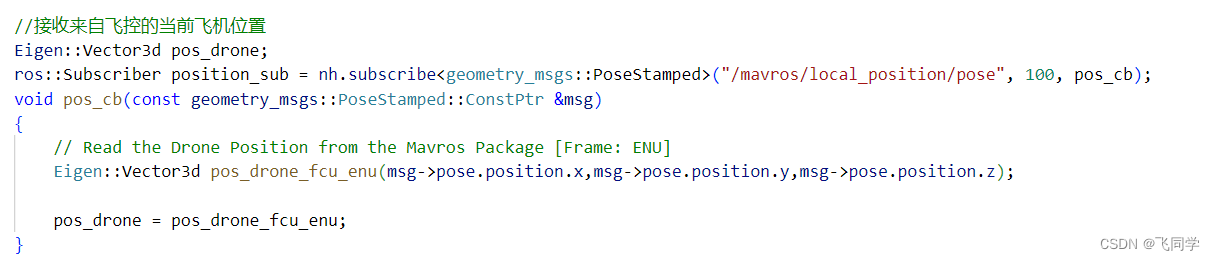
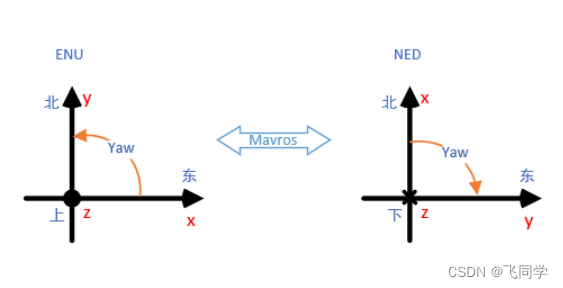
px4使用的坐标系为NED(北东地)坐标系或者FRD(前右下)坐标系。然而mavros(melodic版本)中常使用的是ENU(东北天)坐标系或者body系FLU(前左上),mavros会自动将输入的ENU坐标值或者body系坐标值转换到NED坐标系中,再通过mavlink发送给飞控
mavros中经常出现的FCU 不是代表坐标系缩写,Flight Control Unit 直译就是飞行控制单元
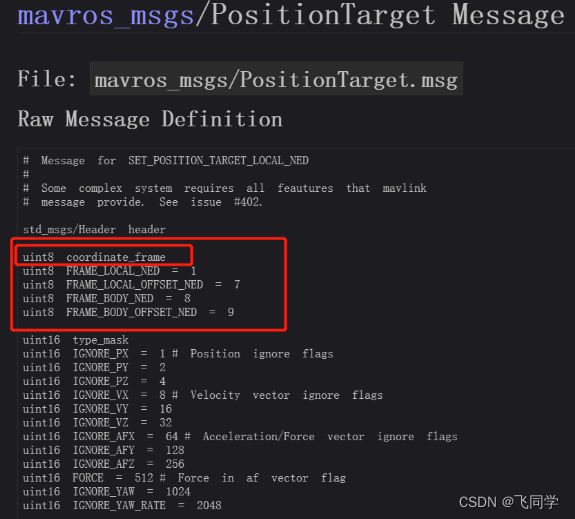
coordinate_frame=1虽然代表向px4发送LOCAL_NED坐标值,但是你发送到这个话题的坐标系应该用ENU,mavros会自动完成这个坐标系的转换。同样的,coordinate=8 也不是BODY_NED系,而是FLU系。目前px4暂不支持向话题里发布coordinate=7、9的坐标值。

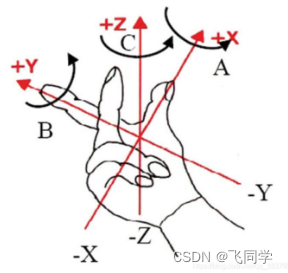
机体坐标系 NED 惯性系
x轴在多旋翼对称平面内指向机头(机头方向与多旋+字形或X字形相关)。 z轴在飞机对称平面内,垂直轴向下。然后,按右手定则确定y轴 。
欧拉角是基于上面两个坐标系的转换。pitch+为抬头,roll+为右旋转,yaw+为右偏航。
Yaw与指南针角度的关系
指南针的角度是确定不变的,北朝向为0度,东为90度,南为180度,西为270度。
Yaw角是当前机头方向与正北方向的夹角(若地球固联坐标系为NED)
也就是说当我们知道YAW角时我们就可以确定飞机当前的航向(东,北哪个方向),比如我们的vision通过mavros给飞控的Yaw的角度是90度,而且飞机的地球固联坐标系为NED,那么可以确定飞机机头当前指向为正东。
在PX4中用到的地球固联坐标轴是NED坐标系,即x,y,z的方向固定不变(Offboard模式下除外,但是在offboard模式下,初始上电后其东北方向由Yaw角决定)
ROS坐标系 ENU
GPS坐标系 WGS-84 X 指向正东 Y指向正北 Z朝上
为了方便使用GPS速度向量进行无人机控制,需要把它转换在无人机所在位置的平面坐标系Local NED
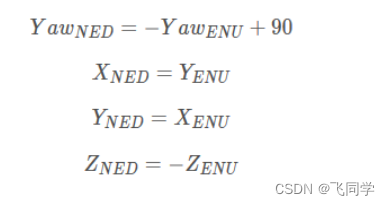
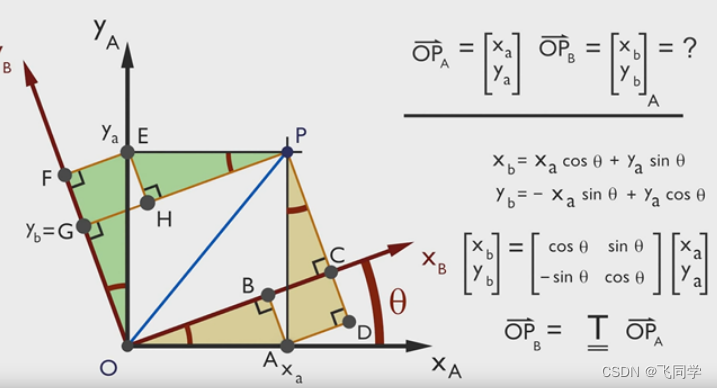
旋转推导公式
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)