做传感器数据融合时,常常会需要用到多个数据,即需要同时订阅多个话题。那么,如何同步这些传感器数据的时间辍,并将它们放入一个回调函数中进行处理呢?
参考文档:
- http://wiki.ros.org/message_filters
- ROS自带多传感器时间同步机制Time Synchronizer测试
- ros消息时间同步与回调
有些消息类型会带有一个头部数据结构,如下所示。信息中带有时间辍数据,可以通过这个数据进行时间同步。
std_msgs/Header header
uint32 seq
time stamp
string frame_id
- 以下是一种同步的方式:
Time Synchronizer
The TimeSynchronizer filter synchronizes incoming channels by the timestamps contained in their headers, and outputs them in the form of a single callback that takes the same number of channels. The C++ implementation can synchronize up to 9 channels.
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image, const CameraInfoConstPtr& cam_info)
{
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image_sub(nh, "image", 1);
message_filters::Subscriber<CameraInfo> info_sub(nh, "camera_info", 1);
TimeSynchronizer<Image, CameraInfo> sync(image_sub, info_sub, 10);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
- 另外一种是基于策略的同步方式,也是通过消息头部数据的时间辍进行同步。
Policy-Based Synchronizer [ROS 1.1+]:
The Synchronizer filter synchronizes incoming channels by the timestamps contained in their headers, and outputs them in the form of a single callback that takes the same number of channels. The C++ implementation can synchronize up to 9 channels.
The Synchronizer filter is templated on a policy that determines how to synchronize the channels. There are currently two policies: ExactTime and ApproximateTime.
-
当需要同步的所有消息都带有时间辍的头部数据:ExactTime
The message_filters::sync_policies::ExactTime policy requires messages to have exactly the same timestamp in order to match. Your callback is only called if a message has been received on all specified channels with the same exact timestamp. The timestamp is read from the header field of all messages (which is required for this policy).
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/exact_time.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image, const CameraInfoConstPtr& cam_info)
{
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image_sub(nh, "image", 1);
message_filters::Subscriber<CameraInfo> info_sub(nh, "camera_info", 1);
typedef sync_policies::ExactTime<Image, CameraInfo> MySyncPolicy;
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), image_sub, info_sub);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
由于该同步策略是当所有需同步的话题的时间辍严格相等时,才会触发回调函数。这就会导致以下一些问题:
- 回调函数的触发频率必然小于等于这些话题中最小的发布频率;
- 回调函数的触发并不十分稳定,有时候甚至会出现长时间不被触发的情况。如下图所示,某一次的间隔甚至长达10s左右。

-
ROS提供了另外一种方法来实现数据的同步:ApproximateTime。与需要时间辍完全相同的ExactTime不同,该方法允许话题之间的时间辍存在一定的偏差。
The message_filters::sync_policies::ApproximateTime policy uses an adaptive algorithm to match messages based on their timestamp.
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <sensor_msgs/Image.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image1, const ImageConstPtr& image2)
{
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image1_sub(nh, "image1", 1);
message_filters::Subscriber<Image> image2_sub(nh, "image2", 1);
typedef sync_policies::ApproximateTime<Image, Image> MySyncPolicy;
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), image1_sub, image2_sub);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
从下图可以看出,虽然该方法允许时间之间存在偏差,但实际上偏差并不大。而且比起上一种方法,这个方法的回调函数的触发频率快多了。

关于ApproximateTime,我还有一个不解的地方,这里做一下记录:
If not all messages have a header field from which the timestamp could be determined, see below for a workaround.
If some messages are of a type that doesn’t contain the header field, ApproximateTimeSynchronizer refuses by default adding such messages.
以上这两句话,似乎自相矛盾。不知道是不是我理解的问题。。。从时间同步的角度看,话题消息内容中应该必须要带上时间辍信息才能进行同步,但第一句话却说可以允许一些消息不带时间辍?
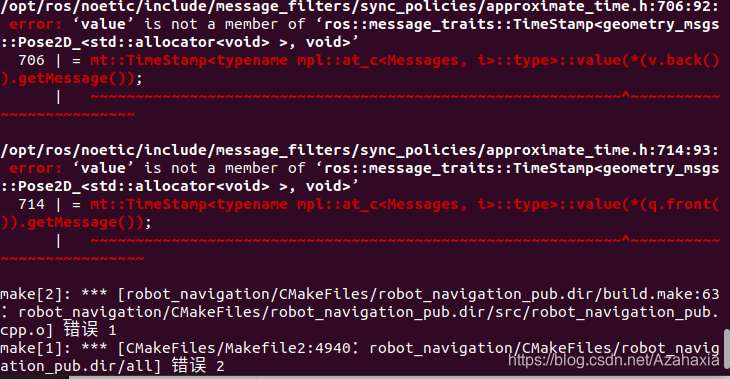
[补充于2021.2.11: 今天在使用ApproximateTime时同步了一个自定义的消息类型,发生了如下图所示的错误。后来查阅资料才发现是没有加header的原因,即没有时间辍,程序就无法根据时间进行同步。换句话说,该方法也是必须需要时间辍信息的。加上header后错误就没有了。]
另外需要注意的是,使用message_filters时,需要在CMakeLists.txt和package.xml中添加相关依赖:
# CMakeLists.txt
find_package( catkin REQUIRED COMPONENTS
...
message_filters
)
# package.xml
find_package( catkin REQUIRED COMPONENTS
<build_depend>message_filters</build_depend>
<build_export_depend>message_filters</build_export_depend>
<exec_depend>message_filters</exec_depend>
)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)