前言
我用最新版PX4固件,offboard模式飞机无法起飞,网上有一种说法是固件版本的问题,让用旧一点的版本
添加链接描述
这个链接描述的情况和我的一模一样,所以我肯定是按这个方法尝试的
旧版本下好了,但是编译通过不了,看情况是缺少东西。但执行这两个命令不管用了,继续想办法。
git submodule update --init --recursive
sudo bash ./Tools/setup/ubuntu.sh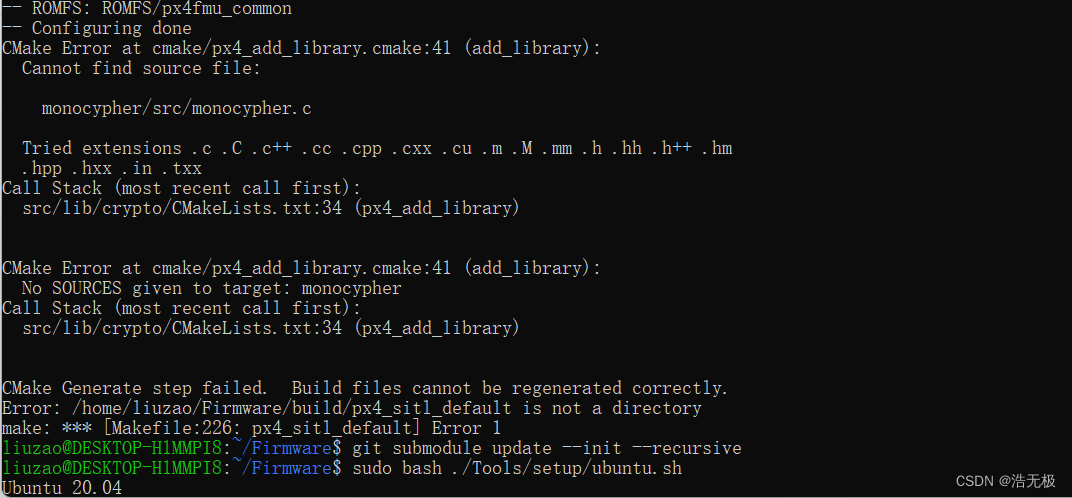
使用make help命令,发现是支持px4_sitl编译的,不是这个原因。
没办法了,安装旧版本卡住了。 不想重新安装旧版本了,安装一次太麻烦了。打算从源头解决,继续查找offboard模式无人机无法起飞的原因,看到下面这篇文章。
解决offboard模式无人机无法起飞
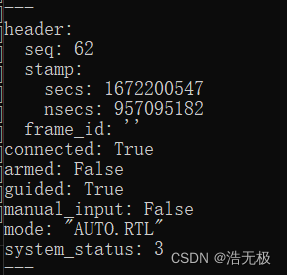
使用rostopic echo /mavros/state命令,查询结果如下。可以看到,mavros是连接上的,就是无法解锁。
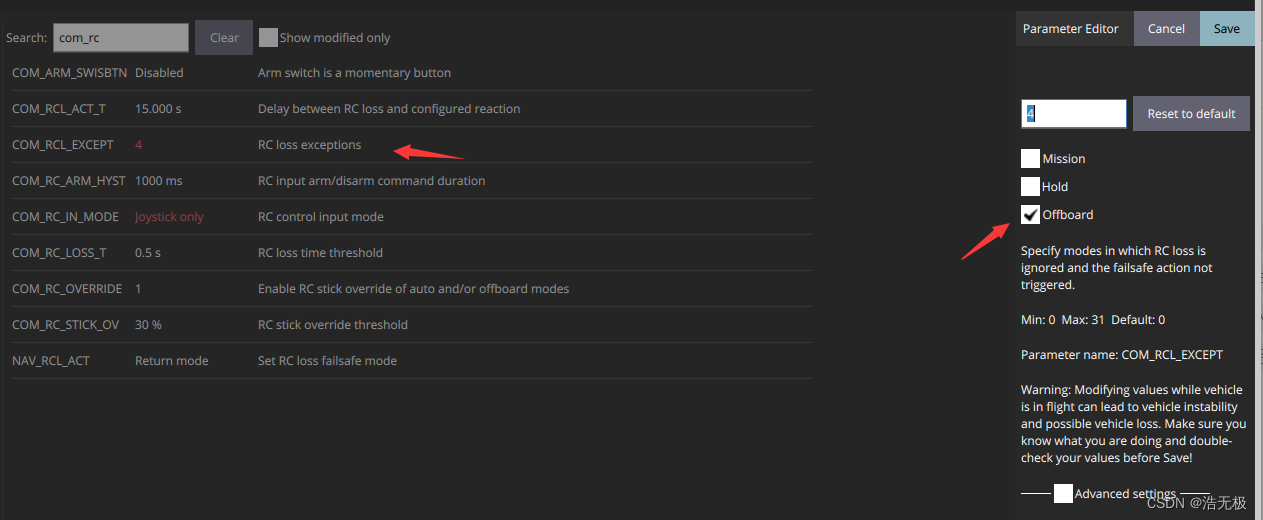
文章提出两个方法解决:
1、在仿真同时开启QGC,设置COM_RCL_EXCEPT=4
2、下载一个管用的旧版本,我之前尝试该方法失败了。但我觉得这个办法是可行的,我可能是网络不好,下载出错了,安装PX4环境经常会因为网络问题出现各种奇怪问题。
我使用方法一,最后起飞咯,镇楼。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)