PX4通过rcS脚本来设定需要启动的程序,比如设备驱动、控制模块、数据通讯等。rcS脚本在项目中的文件位置
ROMFS/px4fmu_common/rcS
对应硬件平台固件上的位置
/etc/init.d/rcS
启动脚本流程如下
#!/bin/sh
# PX4FMU startup script.
#
# 一些注释
#
# 设置默认参数
set R / #根目录
set AUTOCNF no
set FCONFIG /fs/microsd/etc/config.txt #SD卡上的设置脚本
set FEXTRAS /fs/microsd/etc/extras.txt #SD卡上的附加脚本
set FRC /fs/microsd/etc/rc.txt #SD卡上启动脚本,如果有的话运行这个脚本
set IOFW "/etc/extras/px4_io-v2_default.bin" #固件文件,如果有的话,自动刷新
set IO_PRESENT no
set LOGGER_ARGS ""
set LOGGER_BUF 8
set MAV_TYPE none #飞行器类型,这里未设定
set MIXER none
set MIXER_AUX none
set MIXER_FILE none
set MIXER_EXTRA none
set OUTPUT_MODE none
set PARAM_FILE "" #参数文件,未设定
set PWM_OUT none
set PWM_MAIN_RATE p:PWM_MAIN_RATE
set PWM_AUX_OUT none
set PWM_AUX_RATE p:PWM_AUX_RATE
set PWM_EXTRA_OUT none
set PWM_EXTRA_RATE p:PWM_EXTRA_RATE
set EXTRA_MIXER_MODE none
set RC_INPUT_ARGS ""
set SDCARD_AVAILABLE no
set SDCARD_EXT_PATH /fs/microsd/ext_autostart
set SDCARD_FORMAT no
set SDCARD_MIXERS_PATH /fs/microsd/etc/mixers
set STARTUP_TUNE 1
set USE_IO no
set VEHICLE_TYPE none
#打印系统信息
ver all
# 载入SD卡
if [ -b "/dev/mmcsd0" ]
then
if mount -t vfat /dev/mmcsd0 /fs/microsd #mount
then
if [ -f "/fs/microsd/.format" ]
then
echo "INFO [init] format /dev/mmcsd0 requested (/fs/microsd/.format)"
set SDCARD_FORMAT yes
rm /fs/microsd/.format
umount /fs/microsd
else
set SDCARD_AVAILABLE yes
fi
fi
if [ $SDCARD_AVAILABLE = no -o $SDCARD_FORMAT = yes ]
then
echo "INFO [init] formatting /dev/mmcsd0"
set STARTUP_TUNE 15 # tune 15 = SD_ERROR (overridden to SD_INIT if format + mount succeeds)
if mkfatfs -F 32 /dev/mmcsd0
then
echo "INFO [init] card formatted"
if mount -t vfat /dev/mmcsd0 /fs/microsd
then
set SDCARD_AVAILABLE yes
set STARTUP_TUNE 14 # tune 14 = SD_INIT
else
echo "ERROR [init] card mount failed"
fi
else
echo "ERROR [init] format failed"
fi
fi
if [ $SDCARD_AVAILABLE = yes ]
then
if hardfault_log check
then
set STARTUP_TUNE 2 # tune 2 = ERROR_TUNE
if hardfault_log commit
then
hardfault_log reset
fi
fi
fi
set PARAM_FILE /fs/microsd/params #载入成功的情况下,设置参数文件为/fs/microsd/params
fi
# 查看SD卡上的启动脚本,如果有的话启动SD卡上的脚本,没有的话启动默认脚本
if [ -f $FRC ]
then
. $FRC
else
# 默认启动脚本
# 查询MTD设备,挂载SPI-EEPROM,如果有的话设置从mtd设备载入参数
if mft query -q -k MTD -s MTD_PARAMETERS -v /fs/mtd_params
then
set PARAM_FILE /fs/mtd_params
fi
# 载入参数,如果有板载校正数据
if mft query -q -k MTD -s MTD_CALDATA -v /fs/mtd_caldata
then
param load /fs/mtd_caldata
fi
# 从PARAM_FILE载入参数
param select $PARAM_FILE
if ! param import
then
echo "ERROR [init] param import failed"
set STARTUP_TUNE 2 # tune 2 = ERROR_TUNE
param dump $PARAM_FILE
if [ -d "/fs/microsd" ]
then
dmesg >> /fs/microsd/param_import_fail.txt &
# try to make a backup copy
cp $PARAM_FILE /fs/microsd/param_import_fail.bson &
fi
# try importing from backup file
if [ -f "/fs/microsd/parameters_backup.bson" ]
then
echo "[init] importing from parameter backup"
# dump current backup file contents for comparison
param dump /fs/microsd/parameters_backup.bson
param import /fs/microsd/parameters_backup.bson
fi
fi
if [ $SDCARD_AVAILABLE = yes ]
then
param select-backup /fs/microsd/parameters_backup.bson
fi
# 如果硬件版本为V5X或V6X,启动网络管理程序
if ver hwcmp PX4_FMU_V5X PX4_FMU_V6X
then
netman update -i eth0
fi
# 如果自动配置不为0,重设一系列参数
# SYS_AUTOCONFIG定义针对某一机型的自动参数设置,如DJI-F330, DJI-F450, 3DR SOLO等,都有一个对应的数字,具体可以查看/etc/init.d目录下的脚本,或者项目目录ROMFS/px4fmu_common/init.d/airframes目录下的脚本
if param greater SYS_AUTOCONFIG 0
then
# Wipe out params except RC*, flight modes, total flight time, calibration parameters, next flight UUID
param reset_all SYS_AUTO* RC* COM_FLTMODE* LND_FLIGHT* TC_* CAL_ACC* CAL_GYRO* COM_FLIGHT*
set AUTOCNF yes
fi
# 板载架构配置脚本(可选)
set BOARD_ARCH_RC_DEFAULTS ${R}etc/init.d/rc.board_arch_defaults
if [ -f $BOARD_ARCH_RC_DEFAULTS ]
then
echo "Board architecture defaults: ${BOARD_ARCH_RC_DEFAULTS}"
. $BOARD_ARCH_RC_DEFAULTS
fi
unset BOARD_ARCH_RC_DEFAULTS
# 板载配置脚本(可选)
set BOARD_RC_DEFAULTS ${R}etc/init.d/rc.board_defaults
if [ -f $BOARD_RC_DEFAULTS ]
then
echo "Board defaults: ${BOARD_RC_DEFAULTS}"
. $BOARD_RC_DEFAULTS
fi
unset BOARD_RC_DEFAULTS
# 启动声调报警模块
tone_alarm start
# 启动数据管理模块,根据源代码注释,也包含路径点存储(waypoints storage)
if param compare SYS_DM_BACKEND 1
then
dataman start -r
else
if param compare SYS_DM_BACKEND 0
then
# dataman start default
dataman start
fi
fi
# 启动socket通讯和事件发送模块
send_event start
# 启动资源载入监控
load_mon start
# 启动灯闪控制模块
rgbled start -X -q
rgbled_ncp5623c start -X -q
# 运行自动配置脚本,自动配置脚本中,根据SYS_AUTOSTART数值运行对应机型的参数配置
set AUTOSTART_PATH etc/init.d/rc.autostart
if ! param compare SYS_AUTOSTART 0
then
if param greater SYS_AUTOSTART 1000000
then
# Use external startup file
if [ $SDCARD_AVAILABLE = yes ]
then
set AUTOSTART_PATH etc/init.d/rc.autostart_ext
else
echo "ERROR [init] SD card not mounted - trying to load airframe from ROMFS"
fi
fi
. ${R}$AUTOSTART_PATH
fi
unset AUTOSTART_PATH
# 运行SD卡上的用户配置文件,FCONFIG在前面定义,指向SD卡上的配置文件
if [ -f $FCONFIG ]
then
echo "Custom: ${FCONFIG}"
. $FCONFIG
fi
# 如果AUTOCNF已经设置,SYS_AUTOCONFIG置零
if [ $AUTOCNF = yes ]
then
param set SYS_AUTOCONFIG 0
fi
# 如果设置了UAVCAN_ENABLE,启动CAN总线控制
if param greater -s UAVCAN_ENABLE 0
then
if uavcan start
then
if param greater UAVCAN_ENABLE 2
then
set OUTPUT_MODE uavcan_esc
fi
else
tune_control play error
fi
else
if param greater -s UAVCAN_V1_ENABLE 0
then
uavcan_v1 start
fi
fi
# 检查PX4IO以及是否需要更新固件
if [ -f $IOFW ]
then
# Check for the mini using build with px4io fw file
# but not a px4IO
if ver hwtypecmp V540 V560
then
param set SYS_USE_IO 0
else
if px4io checkcrc ${IOFW}
then
set IO_PRESENT yes
else
# tune Program PX4IO
tune_control play -t 16 # tune 16 = PROG_PX4IO
if px4io update ${IOFW}
then
usleep 10000
tune_control stop
if px4io checkcrc ${IOFW}
then
tune_control play -t 17 # tune 17 = PROG_PX4IO_OK
set IO_PRESENT yes
else
tune_control play -t 18 # tune 18 = PROG_PX4IO_ERR
fi
else
tune_control stop
fi
fi
fi
fi
if param compare -s SYS_USE_IO 1
then
set USE_IO yes
fi
if [ $USE_IO = yes -a $IO_PRESENT = no ]
then
echo "PX4IO not found"
set STARTUP_TUNE 2 # tune 2 = ERROR_TUNE
fi
# 启动RC更新(把RC输入映射到手动控制)
rc_update start
#启动手动控制模块
manual_control start
# 启动传感器程序,启动commander模块
if param greater SYS_HITL 0
then
set OUTPUT_MODE hil
sensors start -h
commander start -h
# disable GPS
param set GPS_1_CONFIG 0
# start the simulator in hardware if needed
if param compare SYS_HITL 2
then
sih start
fi
else
set BOARD_RC_SENSORS ${R}etc/init.d/rc.board_sensors
if [ -f $BOARD_RC_SENSORS ]
then
echo "Board sensors: ${BOARD_RC_SENSORS}"
. $BOARD_RC_SENSORS
fi
unset BOARD_RC_SENSORS
. ${R}etc/init.d/rc.sensors
if param compare -s BAT1_SOURCE 2
then
esc_battery start
fi
if ! param compare BAT1_SOURCE 1
then
battery_status start
fi
commander start
fi
# 启动磁偏估计
if param compare -s MBE_ENABLE 1
then
mag_bias_estimator start
fi
# 启动摄像头相关程序
if param greater -s TRIG_MODE 0
then
camera_trigger start
camera_feedback start
fi
# 启动板载mavlink流(可选)
set BOARD_RC_MAVLINK ${R}etc/init.d/rc.board_mavlink
if [ -f $BOARD_RC_MAVLINK ]
then
echo "Board mavlink: ${BOARD_RC_MAVLINK}"
. $BOARD_RC_MAVLINK
fi
unset BOARD_RC_MAVLINK
# 启动UART/串口驱动程序
. ${R}etc/init.d/rc.serial
if [ $IO_PRESENT = no ]
then
# Must be started after the serial config is read
rc_input start $RC_INPUT_ARGS
fi
# 启动PPS输入驱动
if param greater -s PPS_CAP_ENABLE 0
then
pps_capture start
fi
# 启动摄像头拍摄模块
if param greater -s CAM_CAP_FBACK 0
then
if camera_capture start
then
camera_capture on
fi
fi
# 运行rc.vehicle_setup
# rc.vehicle_setup脚本中运行接口程序(rc.interface)和飞行器应用程序(rc.mc_apps)(以多轴飞行器为例)
# 其中rc.interface中启动电机PWM控制程序pwm_out和载入输出配置mixer文件,类似
# pwm_out start - 启动PWM输出程序
# mixer load ... - 载入PWM输出配置文件
# rc.mc_apps启动飞行器相关主要控制程序,包括
# attitude_estimate_q - 姿态估计
# ekf2 - 卡尔曼滤波
# mc_att_control - 姿态控制
# mc_rate_control - 速度控制
# mc_pos_control - 位置控制
# land_detector - 着陆检测
# 等
. ${R}etc/init.d/rc.vehicle_setup
# 播放启动提示音
param compare CBRK_BUZZER 782090
if [ "$?" != "0" -o "$STARTUP_TUNE" != "1" ]
then
tune_control play -t $STARTUP_TUNE
fi
# 启动导航模块
navigator start
# 启动热校正(thermal calibration)程序
. ${R}etc/init.d/rc.thermal_cal
# 启动vmount, px4flow, bst等模块
if param greater -s MNT_MODE_IN -1
then
vmount start
fi
if param compare -s SENS_EN_PX4FLOW 1
then
px4flow start -X
fi
# Blacksheep telemetry
if param compare -s TEL_BST_EN 1
then
bst start -X
fi
# 启动陀螺仪滤波、校正等相关程序
if param compare -s IMU_GYRO_FFT_EN 1
then
gyro_fft start
fi
if param compare -s IMU_GYRO_CAL_EN 1
then
gyro_calibration start
fi
# 启动附加板载脚本
set BOARD_RC_EXTRAS ${R}etc/init.d/rc.board_extras
if [ -f $BOARD_RC_EXTRAS ]
then
echo "Board extras: ${BOARD_RC_EXTRAS}"
. $BOARD_RC_EXTRAS
fi
unset BOARD_RC_EXTRAS
# 启动SD卡俯加脚本
if [ -f $FEXTRAS ]
then
echo "Addons script: ${FEXTRAS}"
. $FEXTRAS
fi
# 启动数据记录
. ${R}etc/init.d/rc.logging
# 启动AUTOSTART后处理程序
if ! param compare SYS_AUTOSTART 0
then
. ${R}etc/init.d/rc.autostart.post
fi
# 启动板载bootloader升级程序
set BOARD_BOOTLOADER_UPGRADE ${R}etc/init.d/rc.board_bootloader_upgrade
if [ -f $BOARD_BOOTLOADER_UPGRADE ]
then
sh $BOARD_BOOTLOADER_UPGRADE
fi
unset BOARD_BOOTLOADER_UPGRADE
fi
# 清除参数设置
unset R
unset AUTOCNF
unset FCONFIG
unset FEXTRAS
unset FRC
unset IO_PRESENT
unset IOFW
unset LOGGER_ARGS
unset LOGGER_BUF
unset MAV_TYPE
unset MIXER
unset MIXER_AUX
unset MIXER_FILE
unset OUTPUT_MODE
unset PARAM_FILE
unset PWM_AUX_OUT
unset PWM_AUX_RATE
unset PWM_MAIN_RATE
unset PWM_OUT
unset PWM_EXTRA_OUT
unset PWM_EXTRA_RATE
unset RC_INPUT_ARGS
unset SDCARD_AVAILABLE
unset SDCARD_EXT_PATH
unset SDCARD_FORMAT
unset SDCARD_MIXERS_PATH
unset STARTUP_TUNE
unset USE_IO
unset VEHICLE_TYPE
# 通知mavlink启动完成
mavlink boot_complete
启动的过程按图示大致如下(当前版本)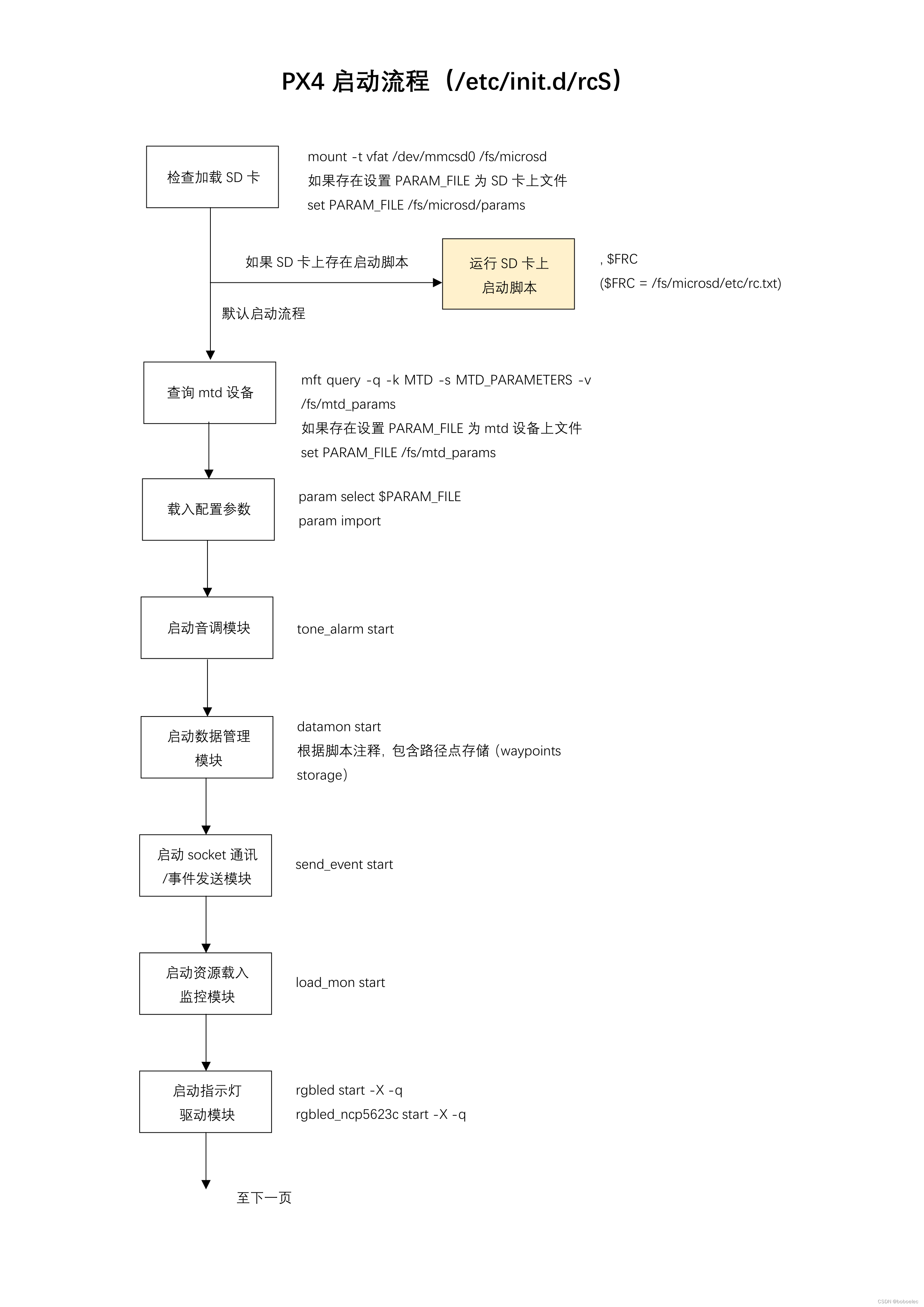



其中黄色部分为SD卡自定义脚本,蓝色部分为控制相关程序,紫色部分为机型相关自动配置程序,绿色部分为算法程序。
总结主要的点有:
1 程序启动首先Load SD卡,如果SD卡上有自定义启动脚本,就运行SD卡上的脚本,如果没有(默认情况),运行板载自动启动流程
2 机型相关的参数配置通过SYS_AUTOSTART值来定义,通过设置这个值,可以自动载入某一机型对应的参数(如DJI 450,3DR SOLO等)
3 飞行控制相关程序在commander,rc.vehicle_setup,navigator等模块或脚本启动,主要的飞控相关模块有
rc_input - 遥控输入
commander - 命令处理
navigator - 导航
pos_control - 位置控制
att_control - 姿态控制
pwm_out - 电机输出
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)