注:这是一篇配置失败的文章,原因是Ubuntu20.04不支持Qt4,catkin_make通不过,不是20.04的可以尝试一下,或者有大神能不能帮忙看下在ubuntu20.04装baxter仿真环境有没有什么好的解决方案,十分感谢!!!
1. 下载程序包(二选一即可):
baxter_simulator: Gazebo Simulation interface for the Baxter Research Robot https://gitee.com/xiongguo/baxter_simulator.gitGitHub - guoxxiong/baxter_simulator: Gazebo Simulation interface for the Baxter Research RobotGazebo Simulation interface for the Baxter Research Robot - GitHub - guoxxiong/baxter_simulator: Gazebo Simulation interface for the Baxter Research Robot
https://gitee.com/xiongguo/baxter_simulator.gitGitHub - guoxxiong/baxter_simulator: Gazebo Simulation interface for the Baxter Research RobotGazebo Simulation interface for the Baxter Research Robot - GitHub - guoxxiong/baxter_simulator: Gazebo Simulation interface for the Baxter Research Robot https://github.com/guoxxiong/baxter_simulator.git2. 解压后把下面的包拷贝到ROS工作空间的src/文件夹下:
https://github.com/guoxxiong/baxter_simulator.git2. 解压后把下面的包拷贝到ROS工作空间的src/文件夹下:

3. 尝试catkin_make,报错:
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"effort_controllers" with any of the following names:
effort_controllersConfig.cmake
effort_controllers-config.cmake
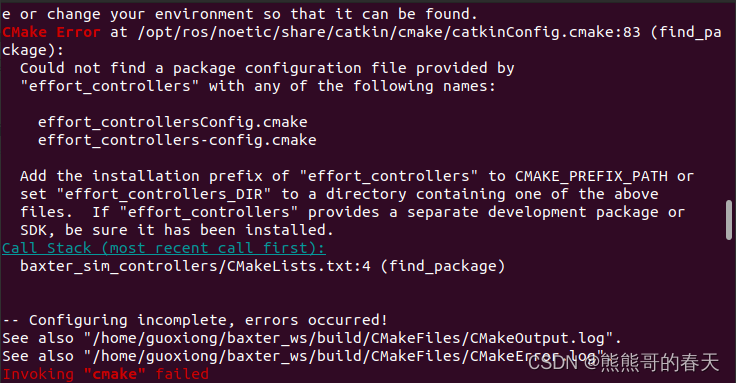 安装缺失的包:
安装缺失的包:
sudo apt-get install ros-noetic-effort-controllers

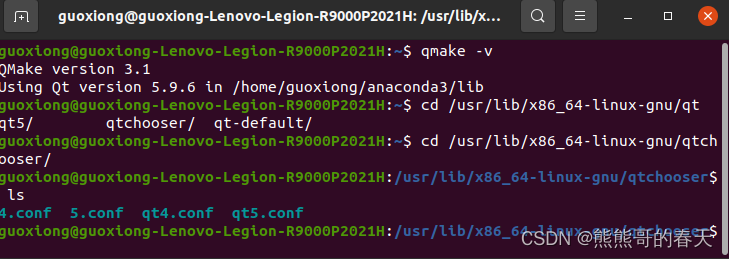
再次catkin_make,再次报错:
CMake Error at /usr/share/cmake-3.16/Modules/FindQt4.cmake:1314 (message):
Found unsuitable Qt version "5.9.6" from
/home/guoxiong/anaconda3/bin/qmake, this code requires Qt 4.x

给Qt降级:
qmake -v
cd /usr/lib/x86_64-linux-gnu/qtchooser/
ls
安装Qt4:
Ubuntu 20.04 LTS 安装qt4 library_nicholas_duan的博客-CSDN博客_ubuntu20安装qt4
我装好后也失败了,时间原因暂时放弃了...希望有大佬帮忙看看怎么解决?

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)