自己编写C++的ROS代码,订阅D435i深度图像,转化为点云数据,并发布出去。
说明:D435i本身就可以输出点云,不需要自己编写代码。本博客的目的是通过自己编写深度图转点云代码来熟悉ROS工程的创建。
Step1:创建ROS工程
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
cd ./src
catkin_create_pkg depth2cloud std_msgs roscpp pcl_conversions pcl_ros
# depth2cloud是创建的包名,后面的是依赖
Step2:源码编写
代码的整体由三部分组成:
- 订阅D435i的深度图 ( /camera/depth/image_rect_raw )
- 订阅D435i的深度相机参数 ( /camera/depth/camera_info )
- 利用深度图和相机参数,将深度图转换为点云数据并发布出去 ( /d435i_point_cloud )
在depth2cloud/src/下新建文件depth2cloud_node.cpp,进行源码编写:
#include <ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_types.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/conversions.h>
#include <iostream>
using namespace std;
ros::Publisher pub_point_cloud2;
bool is_K_empty = 1;
double K[9];
// [fx 0 cx]
// K = [ 0 fy cy]
// [ 0 0 1]
void img_callback(const sensor_msgs::ImageConstPtr &img_msg)
{
// Step1: 读取深度图
//ROS_INFO("image format: %s %dx%d", img_msg->encoding.c_str(), img_msg->height, img_msg->width);
int height = img_msg->height;
int width = img_msg->width;
// 通过指针强制转换,读取为16UC1数据,单位是mm
unsigned short *depth_data = (unsigned short*)&img_msg->data[0];
// Step2: 深度图转点云
sensor_msgs::PointCloud2 point_cloud2;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
for(int uy=0; uy<height; uy++)
{
for(int ux=0; ux<width; ux++)
{
float x, y, z;
z = *(depth_data + uy*width + ux) / 1000.0;
if(z!=0)
{
x = z * (ux - K[2]) / K[0];
y = z * (uy - K[5]) / K[4];
pcl::PointXYZ p(x, y, z);
cloud->push_back(p);
}
}
}
// Step3: 发布点云
pcl::toROSMsg(*cloud, point_cloud2);
point_cloud2.header.frame_id = "world";
pub_point_cloud2.publish(point_cloud2);
}
void camera_info_callback(const sensor_msgs::CameraInfoConstPtr &camera_info_msg)
{
// 读取相机参数
if(is_K_empty)
{
for(int i=0; i<9; i++)
{
K[i] = camera_info_msg->K[i];
}
is_K_empty = 0;
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "ros_tutorial_node");
ros::NodeHandle n;
// 订阅D435i的深度图,在其回调函数中把深度图转化为点云,并发布出来
ros::Subscriber sub_img = n.subscribe("/camera/depth/image_rect_raw", 100, img_callback);
// 订阅D435i的深度相机参数
ros::Subscriber sub_cmara_info = n.subscribe("/camera/depth/camera_info", 1, camera_info_callback);
pub_point_cloud2 = n.advertise<sensor_msgs::PointCloud2>("/d435i_point_cloud", 1000);
ROS_INFO("Runing ...");
ros::spin();
return 0;
}
Step3:修改CMakeLists.txt
执行catkin_create_pkg命令时,自动为我们生成了CMakeLists.txt,只需取消这两处注释:
# 第一处
add_executable(${PROJECT_NAME}_node src/depth2cloud_node.cpp)
# 第二处
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
Step4:编译
cd ~/catkin_ws
catkin_make
Step5:运行
先在另一个终端中打开D435i相机驱动程序:
roslaunch realsense2_camera rs_camera.launch
然后运行自己编写的depth2cloud节点:
source devel/setup.bash
rosrun depth2cloud depth2cloud_node
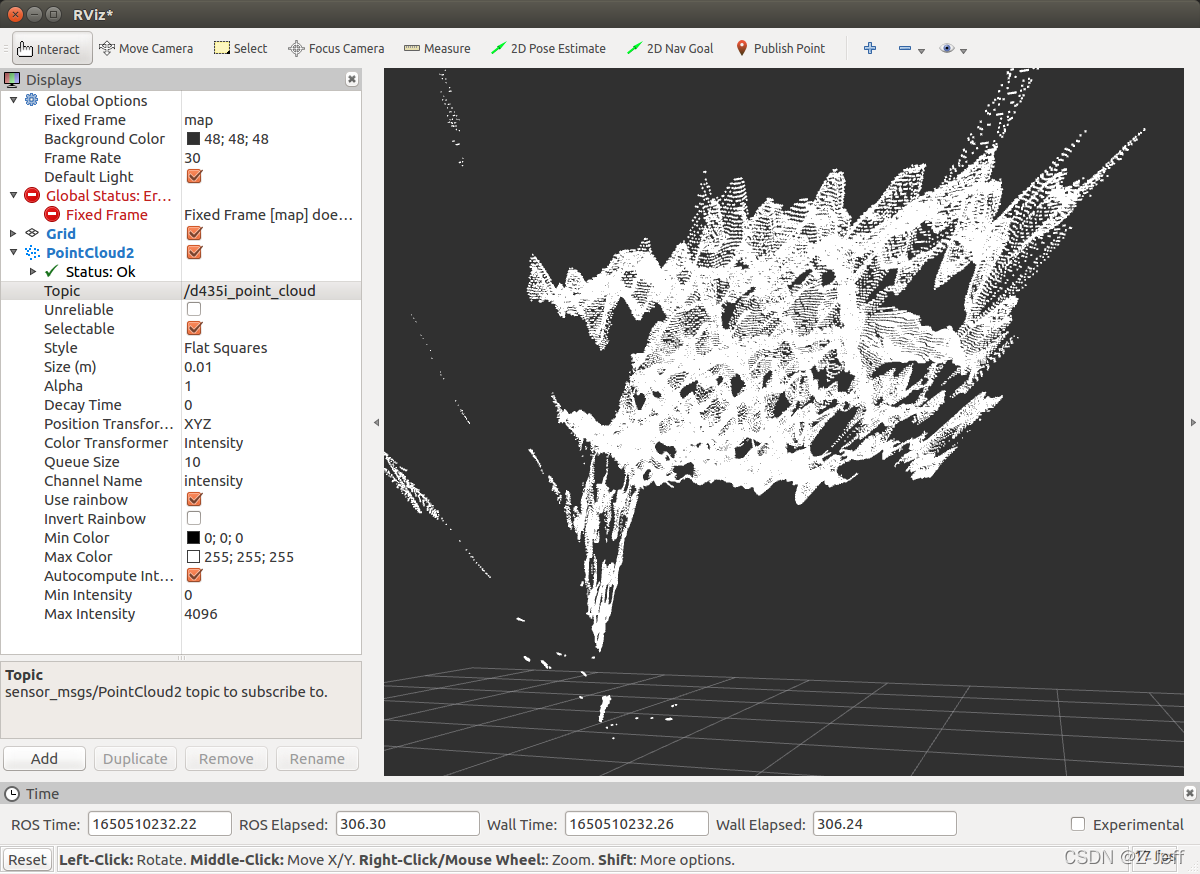
#Step6:可视化
打开rviz,点击左下角<add>,选择<By display type>中的<PointCloud2>,点击<OK>添加。
然后在<Displays>面板中,点开<PointCloud2>,将<Topic>选择为<d435i_point_cloud>,然后就就可以看到点云的可视化了。
参考:
[1] 动手学ROS(13):点云(PointCloud2)的发送与接收--python和c++示例 - 知乎
[2] D435i camera obtains the depth value of a certain point depth image (ROS implementation and official API call)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)