毕设帮助、开题指导、技术解答(有偿)见文末。
目录
摘要
一、硬件方案
二、设计功能
三、实物图
四、原理图
五、PCB图
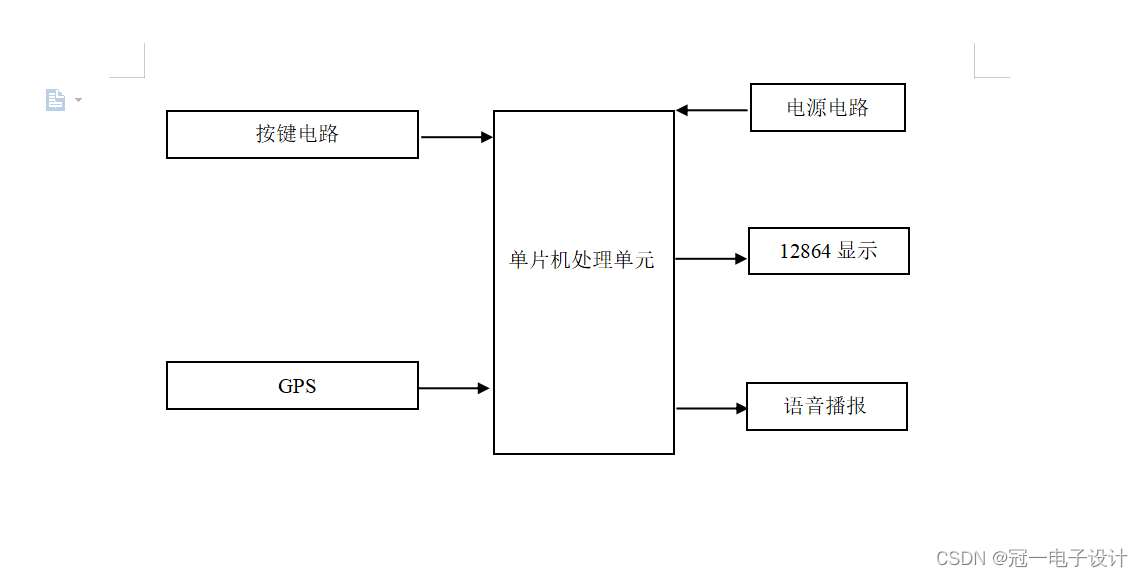
六、 硬件框图
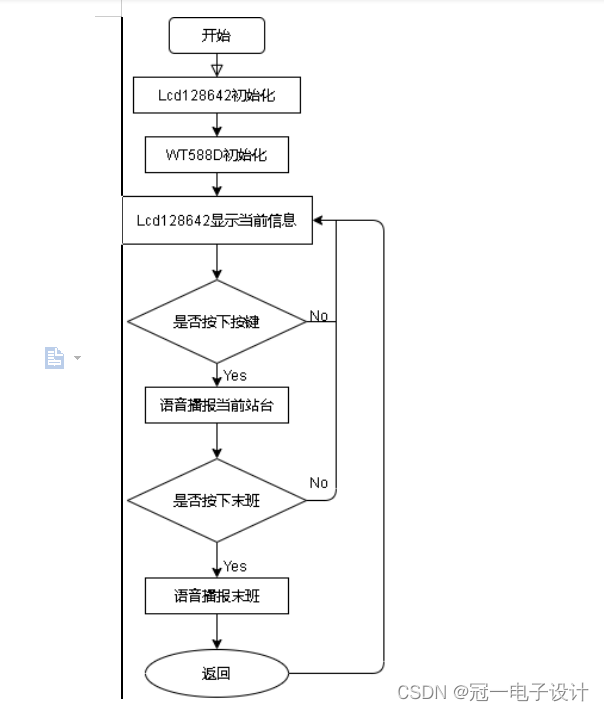
七、流程图
八、程序源码
九、资料包括
摘要
本文详细介绍了一款基于STM32单片机的公交车语音报站台系统设计,通过gps对当前公交车站台进行定位,通过按键分别表示不同的站台,当按下按键时,LCD12864液晶显示屏显示对应的站台名称,并实时显示经纬度变化。此外该设计还带有语音播报功能,当抵达公交末站时,单片机给语音芯片发送指令,控制扬声器进行播报:“本次公交车已经到达低站,祝您生活愉快”。
关键词:STM32单片机;公交语言播报;液晶屏;
一、硬件方案
本系统采用STM32单片机+LCD12864液晶显示+语音模块WT588D + GPS定位+按键设置+DS1302时钟芯片
二、设计功能
1、LCD12864液晶显示当前年月日,星期,时间,当前站名,是否连接gps,自动/手动模式。
2、按键可以设置当前站名,时间,日期,站点,站点GPS经纬度。
3、手动模式下:可以直接通过按键直接播报当前站名,切换下一站。
4、自动模式下:根据设置到站点自动进行播报。
三、实物图

四、原理图

五、PCB图

六、 硬件框图
七、流程图
八、程序源码

九、资料包括
需要完整的资料可以点击下面的名片,找我要资源压缩包的百度网盘下载地址及提取码。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)