本文讲解ROS借助阿里云的 DNS API 来实现域名与动态 IP 的绑定,用来达到外网访问内网设备的需求。
一、给域名添加A记录解析
1、点击登录阿里云域名控制台
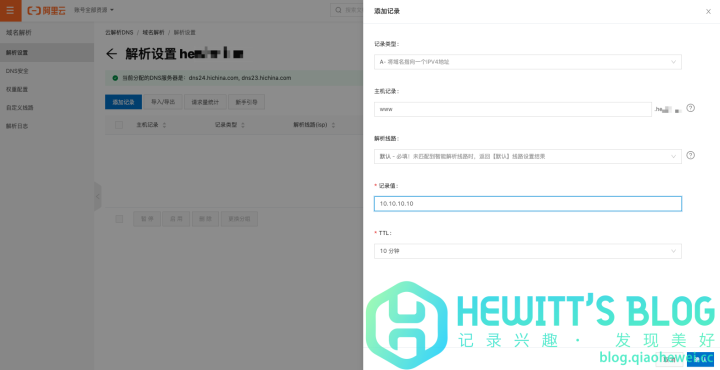
2、给域名添加一个A记录解析,记录值可以随意填写,前期仅用于判断后期动态解析是否生效。
二、开启阿里云RAM访问控制
一、创建用于编程访问的新用户

1、点击进入阿里云RAM访问控制台

2、进入RAM访问控制台点击左侧用户,创建一个新的用户,登录名称可以根据自己的喜好进行填写(例如:home_ros),并将“编程访问”打钩。
3、用户创建成功后显示上图,将页面显示的AccessKey ID、AccessKey Secret,保存备用。
二、创建用于控制域名的新权限策略

1、进入RAM访问控制台点击左侧“权限策略管理”,创建一个新的策略。

2、策略名称可根据喜好填写(例如:Ros_DDNS),配置模式选择为脚本配置,并将下方脚本填入编辑器内。
将脚本中的qiaohewei.cc替换为自己的要解析的域名
DDNS脚本下载
三、将权限策略授权给用于DDNS的用户

1、进入RAM访问控制台点击左侧“授权”,创建一个新的授权。
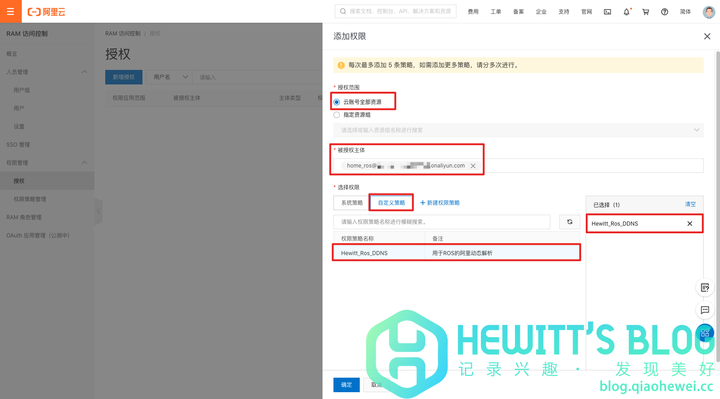
2、授权范围:云账户全部资源。
3、在被授权主体:输入新建的用户名(例如:home_ros)。
4、选择权限:点击“自定义策略”,并选择刚刚创建策略名称,选择后将显示在右侧。
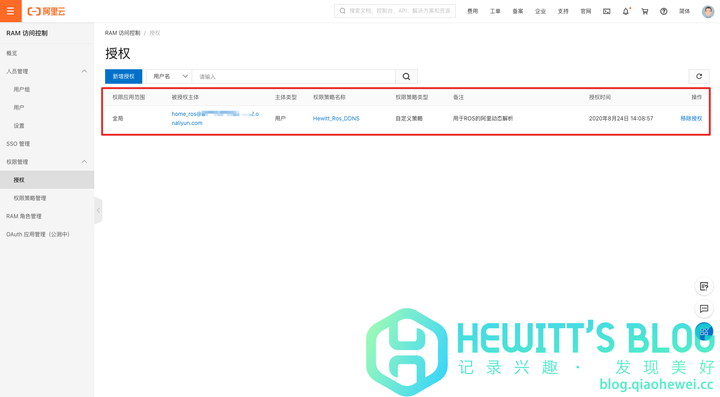
5、完成以后可以在授权列表查看到新增的授权记录。
三、ROS Aliyun DDNS 脚本配置
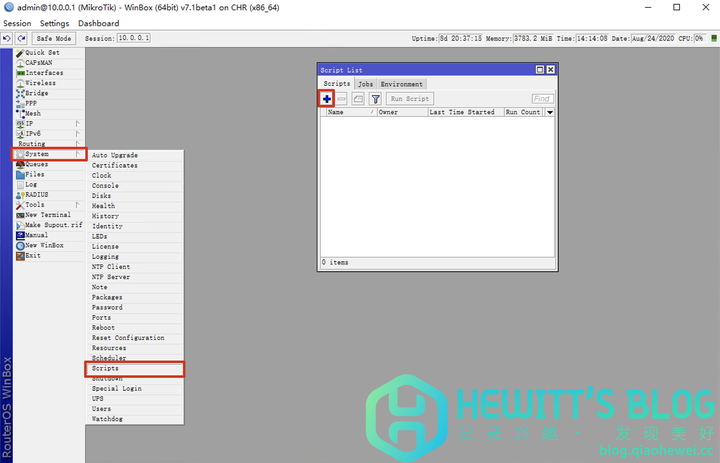
1、使用WinBox登录ROS,点击“System” -- “Scripts”,点击左上角蓝色“+”号,新增一个阿里云DDNS脚本。

2、脚本名称填入Aliyun_DDNS,并将下方脚本粘贴入编辑器中。
注意事项:根据之前保存的阿里云AccessKeyID、AccessKeySecret替换脚本中标注的内容,并将汉字注释内容删除。
DDNS脚本下载

3、脚本创建完毕如上图。
四、创建ROS Aliyun DDNS 定时任务

1、点击“System” -- “Scheduler”,点击左上角蓝色“+”号,新增一个定时任务。
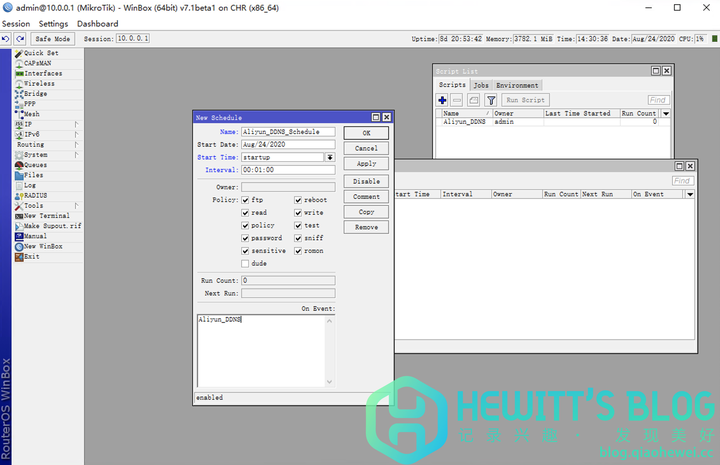
2、Name:根据自己喜好填写。
3、Start Time:startup。
4、Interval:00:01:00(代表一分钟执行一次)。
5、文本框内输入要执行的脚本名称,例如Aliyun_DDNS(这是创建DDNS脚本时定义的脚本名称Name)。
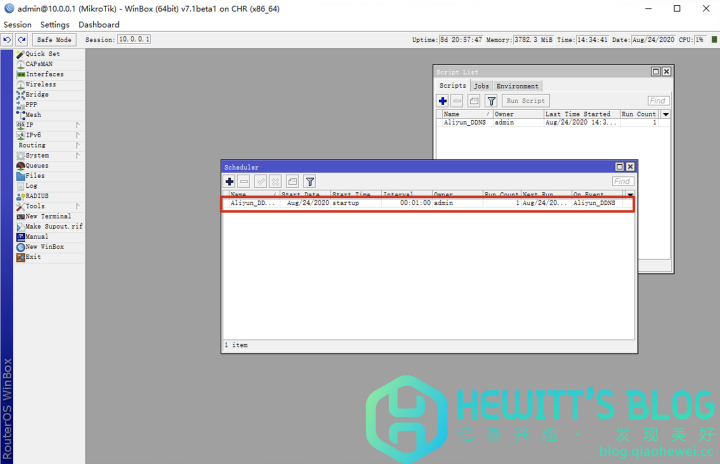
6、完成后点击OK,创建成功如上图。
五、检查脚本执行状态

1、点击Log查看ROS日志,稍等一会儿即可看到,alidns update ok,表示ROS已成功定时执行脚本。
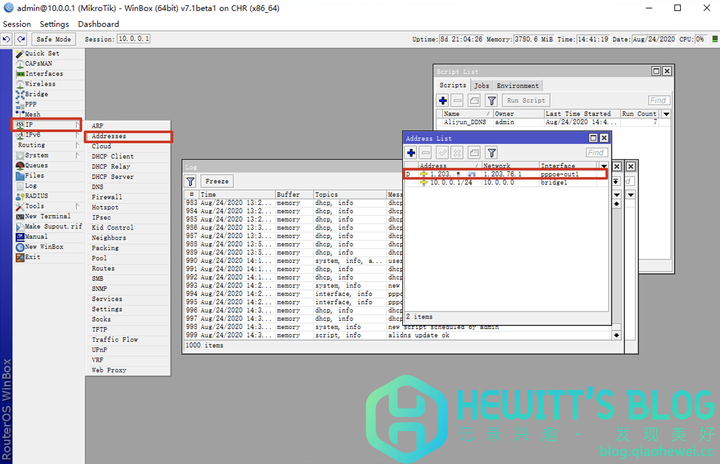
2、WinBox点击“IP” -- “Address”,查看ROS获取的动态外网IP,有“D”标识的表示此条为动态获取。

2、访问阿里云域名控制台查看域名解析记录,发现阿里云解析记录已变为ROS动态获取的IP地址。
至此,ROS 阿里云DDNS动态域名解析配置完成 Enjoy~。
六、Aliyun阿里云DDNS脚本下载
ROS_Aliyun阿里云DDNS脚本下载
相关阅读:
RouterOS(ROS)软路由端口映射转发回流
如您认为文章对您有用,欢迎打赏,谢谢~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)