51单片机课设—智能小车
- 一、课设任务
- 二、硬件设计及相关传感器模块
- 1、车模
- 2、51单片机
- 3、红外循迹模块
- 4、电机及驱动
- 5、蓝牙模块
- 6、硬件搭建
- 三、程序代码
-
- 四、我的大学--“造车”史
注:本设计资源可在微信公众号:“Kevin的学习站” 中获取!如有问题,可以加我QQ:643470489一起交流哦!
一、课设任务
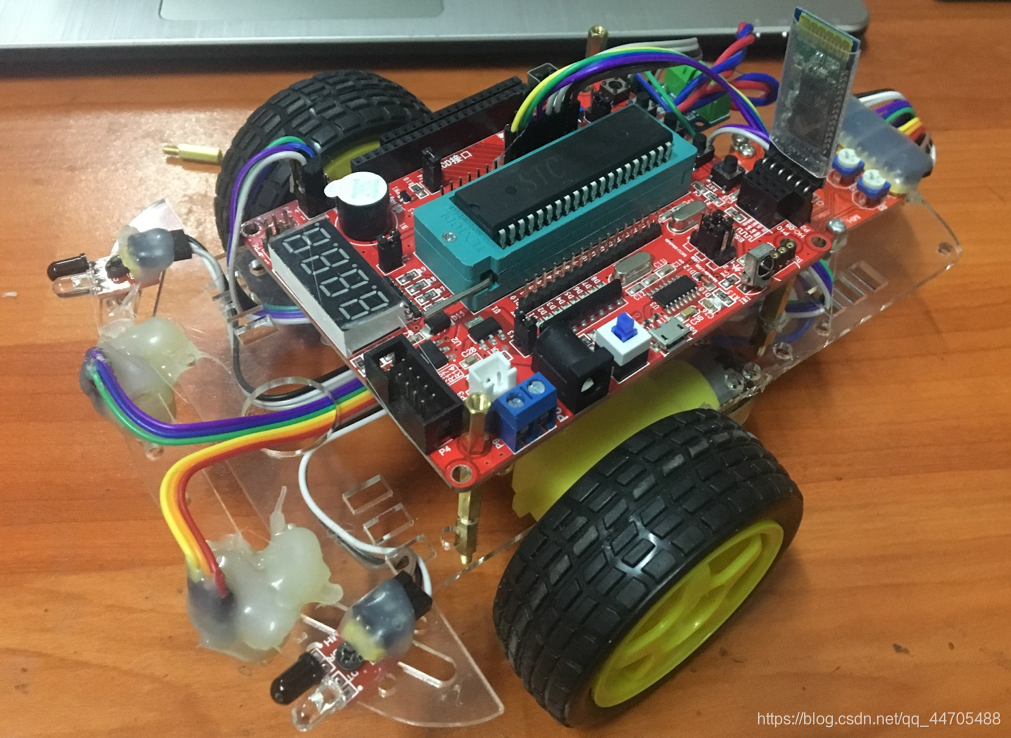
使用51单片机设计一台智能小车,可以实现循迹、避障、手机APP控制等功能!
二、硬件设计及相关传感器模块
1、车模

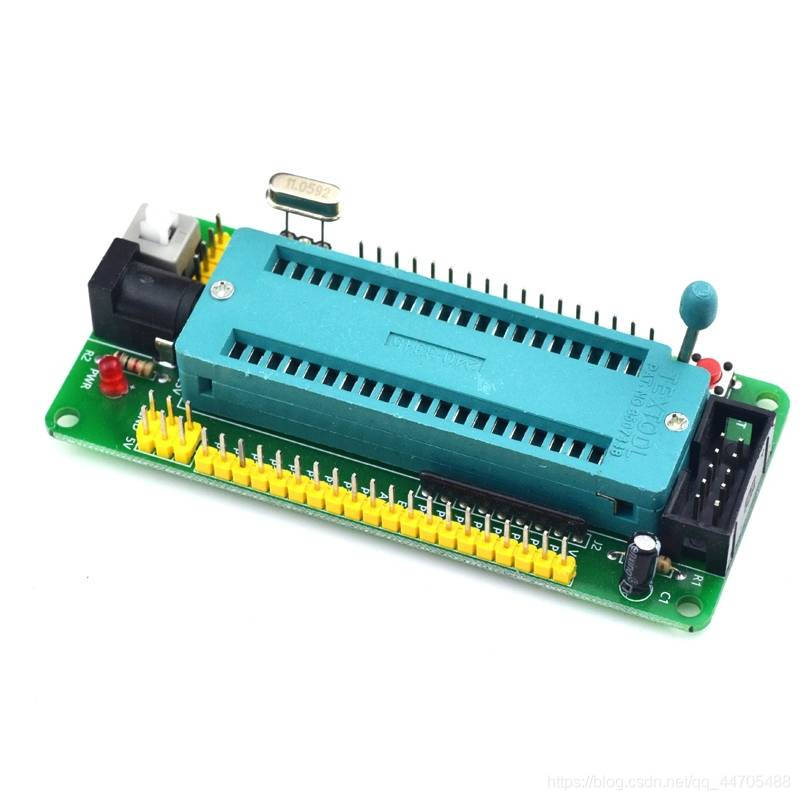
2、51单片机
可以使用最小系统板,也可以使用自己的学习板
3、红外循迹模块
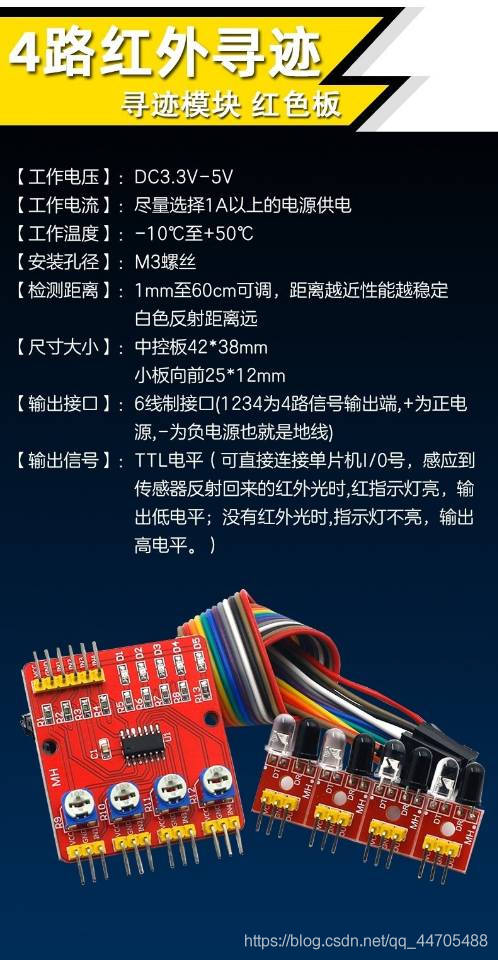
红外循迹的原理:
4、电机及驱动

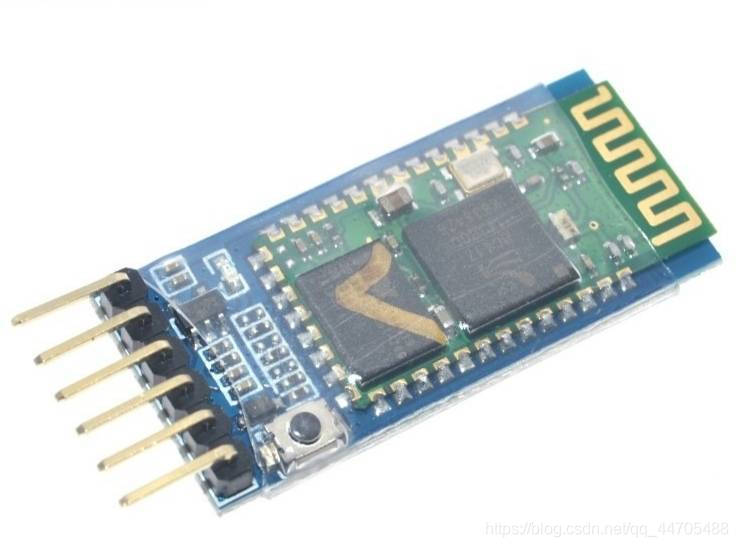
5、蓝牙模块
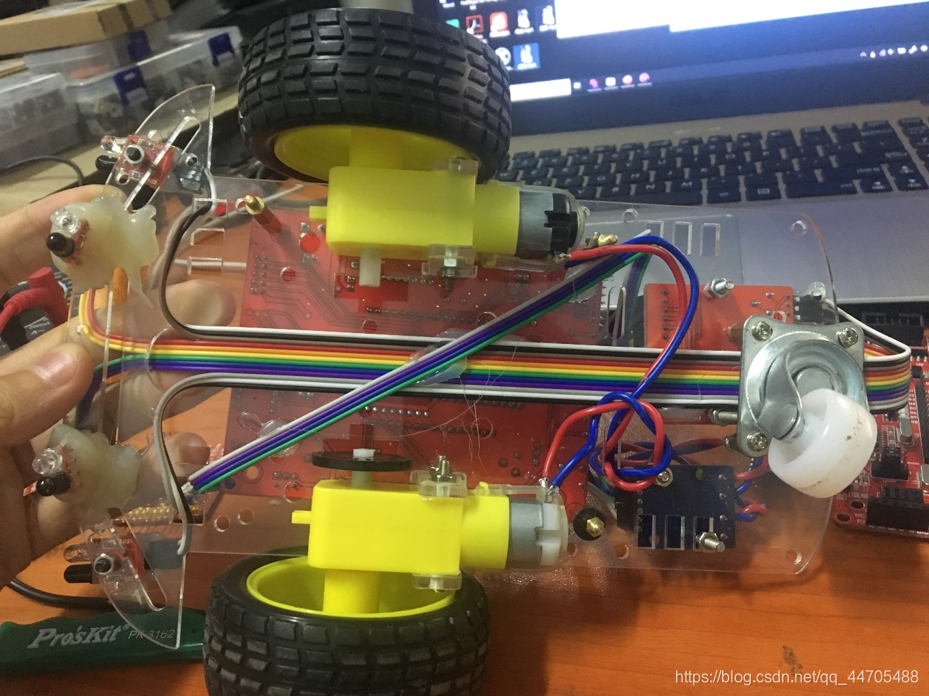
6、硬件搭建
原则:硬件搭建的不好,会让我们在调试过程中遇到很多玄学问题,比如:杜邦线接触不良,杜邦线短路等等,为了调试更加舒服,在搭建硬件平台时,接口要做一些处理,比如接口处用热熔胶粘好,防止脱落,布线要尽量整齐一些,如果要参加智能车类的比赛,一个好的布线布局,会让你的对手瞬间感受到压力!
三、程序代码
1、main.c文件
#include "reg52.h"
sbit KEY1 = P3^3;
sbit KEY2 = P3^4;
sbit KEY3 = P3^6;
sbit KEY4 = P3^7;
sbit OUT1 = P2^4;
sbit OUT2 = P2^5;
sbit OUT3 = P2^6;
sbit OUT4 = P2^7;
extern void delay_ms(unsigned int n);
extern void go_stop(void);
extern void go_up(void);
extern void go_back(void);
extern void go_left(void);
extern void go_right(void);
extern void go_upleft(unsigned int n);
extern void go_upright(unsigned int n);
extern void go_backleft(unsigned int n);
extern void go_backright(unsigned int n);
unsigned char recv;
void uart_init(void)
{
TMOD = 0x20;
TH1 = 0xFD;
TL1 = 0xFD;
TR1 = 1;
SM0 = 0;
SM1 = 1;
REN = 1;
ES = 1;
EA = 1;
}
void uart_send(unsigned char *str,int len)
{
unsigned char i;
for(i=0;i<len;i++)
{
SBUF = str[i];
while(TI == 0);
TI = 0;
}
}
void remote_control(void)
{
while(1)
{
switch(recv)
{
case 0:
go_stop();break;
case 1:
go_up();break;
case 2:
go_back();break;
case 3:
go_left();break;
case 4:
go_right();break;
case 5:
go_upleft(6);break;
case 6:
go_upright(6);break;
}
}
}
void search_path(void)
{
while(1)
{
if(OUT2==0 && OUT3==0)
{
go_up();
}
else if(OUT2==1 && OUT3==0)
{
go_left();
}
else if(OUT2==0 && OUT3==1)
{
go_right();
}
else if(OUT2==1 && OUT3==1)
{
go_back();
}
}
}
void auto_avoid(void)
{
while(1)
{
if(OUT1==1 && OUT4==1)
{
go_up();
}
else if(OUT1==0 && OUT4==1)
{
go_backleft(4);
}
else if(OUT1==1 && OUT4==0)
{
go_backright(4);
}
else if(OUT1==0 && OUT4==0)
{
go_stop();
}
}
}
void main(void)
{
unsigned char ATcmd[]={"AT+NAME=GEC-zhangxueyou\r\n"};
uart_init();
if(KEY1 == 0)
{
uart_send(ATcmd,sizeof(ATcmd));
delay_ms(1000);
}
else if(KEY2 == 0)
{
remote_control();
}
else if(KEY3 == 0)
{
search_path();
}
else if(KEY2 == 0)
{
auto_avoid();
}
}
void uart_isr(void) interrupt 4
{
if(RI == 1)
{
RI = 0;
recv = SBUF;
SBUF = recv;
while(TI == 0);
TI = 0;
}
}
2、motor.c文件
#include "reg52.h"
sbit La = P2^1;
sbit Lb = P2^0;
sbit Ra = P2^3;
sbit Rb = P2^2;
void delay_ms(unsigned int n)
{
unsigned char i;
while(n--)
{
for(i=0;i<113;i++);
}
}
void go_stop(void)
{
La = 0;
Lb = 0;
Ra = 0;
Rb = 0;
}
void go_up(void)
{
La = 1;
Lb = 0;
Ra = 1;
Rb = 0;
delay_ms(100);
}
void go_back(void)
{
La = 0;
Lb = 1;
Ra = 0;
Rb = 1;
delay_ms(100);
}
void go_left(void)
{
La = 0;
Lb = 1;
Ra = 1;
Rb = 0;
delay_ms(100);
}
void go_right(void)
{
La = 1;
Lb = 0;
Ra = 0;
Rb = 1;
delay_ms(100);
}
void go_upleft(unsigned int n)
{
unsigned int i=30;
Ra = 1;
Rb = 0;
Lb = 0;
while(i--)
{
La = 1;
delay_ms(n);
La = 0;
delay_ms(10-n);
}
}
void go_upright(unsigned int n)
{
unsigned int i=30;
La = 1;
Lb = 0;
Rb = 0;
while(i--)
{
Ra = 1;
delay_ms(n);
Ra = 0;
delay_ms(10-n);
}
}
void go_backleft(unsigned int n)
{
unsigned int i=200;
Ra = 0;
Rb = 1;
La = 0;
while(i--)
{
Lb = 1;
delay_ms(n);
Lb = 0;
delay_ms(10-n);
}
}
void go_backright(unsigned int n)
{
unsigned int i=200;
La = 0;
Lb = 1;
Ra = 0;
while(i--)
{
Rb = 1;
delay_ms(n);
Rb = 0;
delay_ms(10-n);
}
}
四、我的大学–“造车”史
我记得我是从大一上学期开始我的“造车史”的吧,当时是参加学校冬令营培训,使用51单片机完成的人生的第一台智能车,在小组团队比赛中,我的小车的成绩还不错,哈哈哈,后面参加了学校组织的循迹小车竞赛,与相差0.1s的差距拿了个二等奖;造第二台车是大二的第一学期,当时学完STM32想要做点东西练练手,于是使用STM32又做了台车,不过资料都不见了!大二学校冬令营当时我们作为学长又带领了学弟学妹们又做了51小车;到了大二下学期,准备第十五全国大学生智能汽车竞赛,又是造车哈,当时选的题目是AI电磁智能车,这次高大上了哈,用的是NXP-RT1064的MCU,使用深度学习算法+传统PID控制让智能车以最快的速度跑完赛道,赛后的成绩是9秒多吧,唉。。。其实可以更快的,比赛就是这样,有时候需要天时地利人和!综合自己的“造车”史,最后的感悟就是:有时候结果不一定重要,注重过程,把握过程中的每一个细节,把相关的原理都搞懂,然后多练习、多做总结,这才是最大的收获!
顺便在这里提一下,对参加智能车项目的学弟学妹们的一些建议吧:
1、硬件平台一定要搭好,尽量少用杜邦线,它本身信号就不太稳定,智能车相对来说模块比较多了,如果使用杜邦线,硬件出了问题很难查出来,会把你心态搞死!可以考虑用FPC接口,电源接口、电机接口可以用XT60接口。


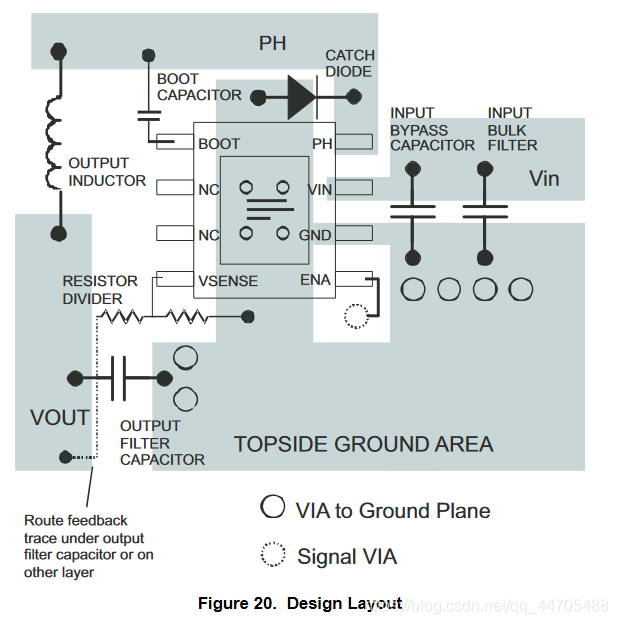
2、电源要设计好,像使用开关稳压电源时注意下面几点:
①、 要明确电源的输入输出电主电路,把输入输出的元器件进行分离,注意大小电容的放置(先大后小原则);
②、布局要紧凑,采用一字或者L型布局方式;
③、如果系统需要多路开发电源工作时,尽量使相邻电感之间垂直放置,这样可以降低电磁干扰;
④、其他器件采用就近原则放置;
⑤、开关电源内部的信号连接线要加粗,一般采用10mil;
⑥、反馈电路部分,要远离干扰源和大电流的平面,反馈电源要从滤波电路里面取;
⑦、PCB布局时要注意电感下尽量不要布线,电感下要挖铜皮,不要增加电感的出线宽度。
不然效果如下图:


布局布线多参考芯片数据上的Layout。
推荐几家电源管理芯片做的比较好的公司:TI-德州仪器、ADI-亚德诺半导体、安森美、立锜科技。根据需求选择吧,比如方案既需要开关稳压的高效,又需要线性稳压的低纹波,就可以考虑电荷泵电路——优势:消除电感器问题、在更低的输入电压下提供更高效率,以及缩减解决方案尺寸。总之电源一定要设计好!
3、相关外设要做隔离,比如电机、舵机这类的要做隔离,不然容易烧核心板,都是痛苦的教训啊!
4、如果要使用干簧管进行停车,尽量自己设计好PCB,不要嫌麻烦;
5、PCB形状可以根据车模结构去设计,外设接口尽量使用连接性比较好的;
6、自己的车可以适当加点个性的东西哈,比如设计个前灯,尾灯什么的,寓意:快到只能让你看到车尾灯残影!哈哈哈
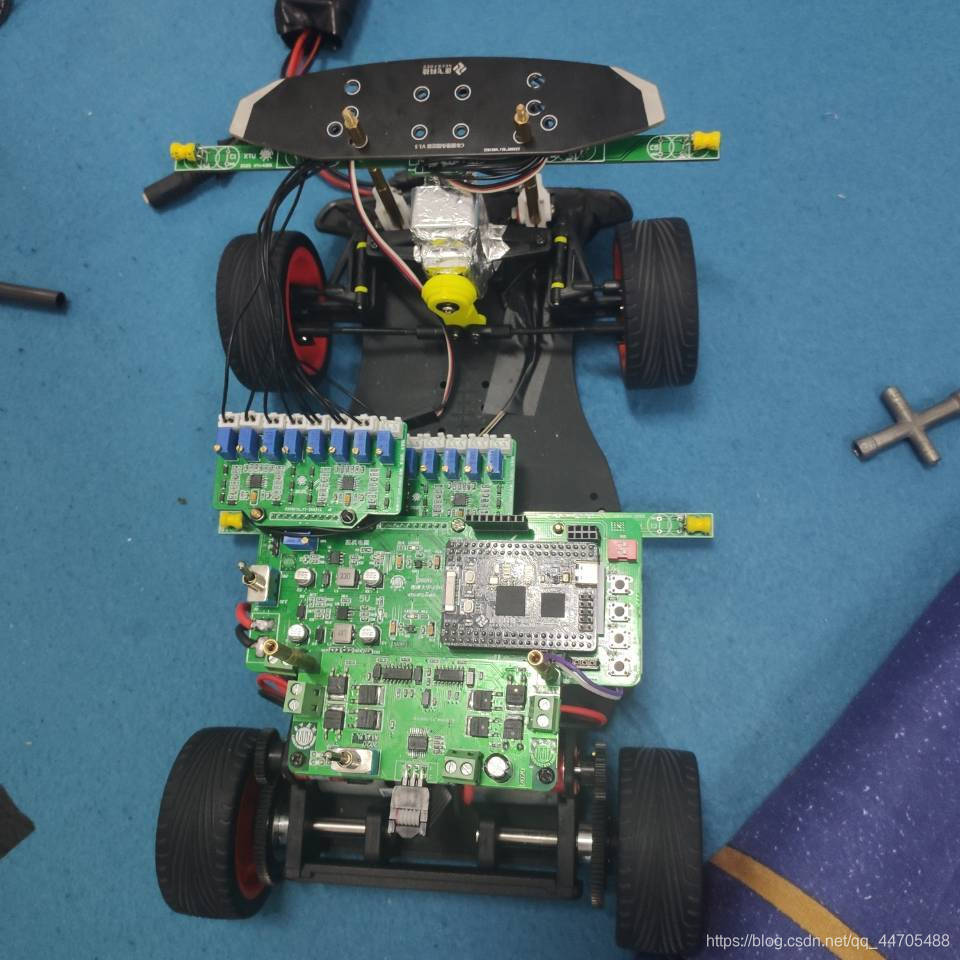
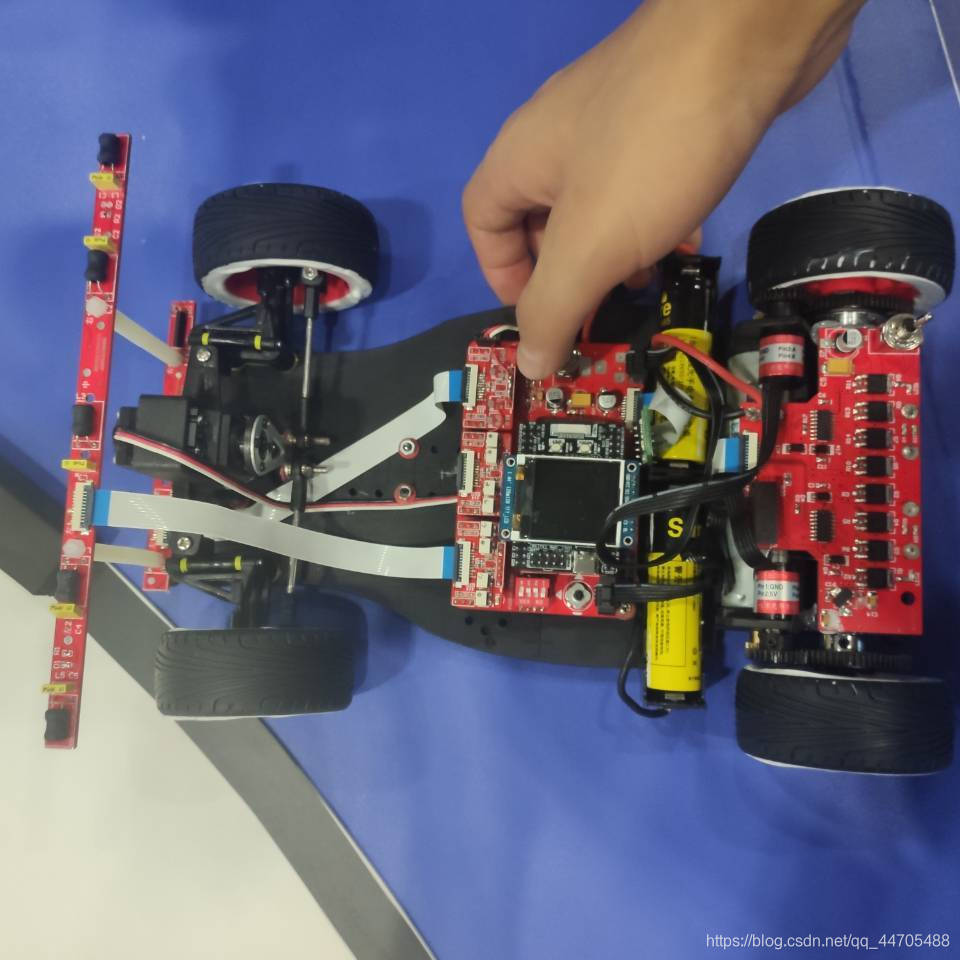
下面找了几台硬件搭的不错的智能车图片,仅供参考!

接下来的学习生涯里希望自己继续“造车”之路,在这个无人驾驶爆火的时代,补补脑洞,填填坑!
立个flag:做一台无人驾驶小车!等有时间就开始入坑,从主控、电机、电机驱动、电源模块、slam、双目识别、定位、路径规划等方面慢慢入手,我想这才算得上真正的造车吧!
声明:文中有关图片来源于互联网,如有侵权,请联系作者删除,谢谢合作!
想要获取更多资源,可以关注公众号:Kevin的学习站,之前听到过一句很有意思的话:“天下代码都在抄,抄来抄去有提高”,希望此文对您有一定的帮助,整理不易,但您的点赞、关注、收藏就是对我最大的鼓励!

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)